Das könnte Ihnen auch gefallen
- Operating SystemDokument49 SeitenOperating Systemsatish161188Noch keine Bewertungen
- Module 5 RTOS and IDE For Embedded System DesignDokument229 SeitenModule 5 RTOS and IDE For Embedded System DesignRuthvik Thumuluri0% (1)
- Embedded Linux 4d Slides PDFDokument392 SeitenEmbedded Linux 4d Slides PDFPaul RattinkNoch keine Bewertungen
- OS Quiz 1Dokument4 SeitenOS Quiz 1Mohamad Syahmi0% (1)
- Instruction Sets in Computer ArchitectureDokument52 SeitenInstruction Sets in Computer ArchitectureEswin AngelNoch keine Bewertungen
- 5 SolDokument4 Seiten5 Solevilanubhav50% (2)
- Operating SystemsDokument7 SeitenOperating SystemsIT8109Noch keine Bewertungen
- Computer Architecture Notes - RanaDokument14 SeitenComputer Architecture Notes - Ranarahul_singh654492550% (2)
- Operating System Exercises - Chapter 13-SolDokument4 SeitenOperating System Exercises - Chapter 13-Solevilanubhav100% (1)
- EE6602 Embedded Systems Lecture NotesDokument115 SeitenEE6602 Embedded Systems Lecture NotesJayamurugan MookkanNoch keine Bewertungen
- Operating System Exercises - Chapter 5-ExrDokument2 SeitenOperating System Exercises - Chapter 5-ExrevilanubhavNoch keine Bewertungen
- A Short Introduction To Operating SystemsDokument105 SeitenA Short Introduction To Operating SystemsscribdNoch keine Bewertungen
- Embedded SystemsDokument2 SeitenEmbedded SystemsKavitha SubramaniamNoch keine Bewertungen
- Operating System Exercises - Chapter 16-SolDokument4 SeitenOperating System Exercises - Chapter 16-SolevilanubhavNoch keine Bewertungen
- 21CS43 Module 5 Microcontroller and Embedded Systems Prof VANARASANDokument41 Seiten21CS43 Module 5 Microcontroller and Embedded Systems Prof VANARASANNikhil chandNoch keine Bewertungen
- Lab Manual - RTOS AchitectureDokument6 SeitenLab Manual - RTOS Achitectureritika jaiswalNoch keine Bewertungen
- MCES-21CS43 Module-1 NotesDokument14 SeitenMCES-21CS43 Module-1 NotesEdu techNoch keine Bewertungen
- Data Mining Is Defined As The Procedure of Extracting Information From Huge Sets of DataDokument6 SeitenData Mining Is Defined As The Procedure of Extracting Information From Huge Sets of DataOdem Dinesh ReddyNoch keine Bewertungen
- Operating System Exercises - Chapter 9 SolDokument6 SeitenOperating System Exercises - Chapter 9 SolevilanubhavNoch keine Bewertungen
- Continuous Integration - From Theory To PracticeDokument61 SeitenContinuous Integration - From Theory To PracticepavanimopuriNoch keine Bewertungen
- Nav 6Dokument6 SeitenNav 6shailesh singhNoch keine Bewertungen
- Answers Unix TRPDokument7 SeitenAnswers Unix TRParunkareerNoch keine Bewertungen
- CS1253 2,16marksDokument24 SeitenCS1253 2,16marksRevathi RevaNoch keine Bewertungen
- Operating SystemDokument28 SeitenOperating SystemKunalNoch keine Bewertungen
- OS Concepts Chapter 2 Solution To Practice Exercises Part 2Dokument2 SeitenOS Concepts Chapter 2 Solution To Practice Exercises Part 2Alfred Fred100% (2)
- Digital Light ProcessingDokument22 SeitenDigital Light ProcessingRahul Kumar0% (1)
- LPC2148 ARM7 MicrocontrollerDokument80 SeitenLPC2148 ARM7 MicrocontrollerChhaya Sharma100% (3)
- Real Time Operating SystemsDokument35 SeitenReal Time Operating SystemsNeerajBooraNoch keine Bewertungen
- HWSW Co Design Unit-1notesDokument195 SeitenHWSW Co Design Unit-1notesswapna revuriNoch keine Bewertungen
- CS321 Computer ArchitectureDokument160 SeitenCS321 Computer ArchitectureAnurag kumarNoch keine Bewertungen
- Algorithms Governability Early DraftDokument16 SeitenAlgorithms Governability Early DraftCristina AndreeaNoch keine Bewertungen
- OS Services for Programs & UsersDokument6 SeitenOS Services for Programs & UsersAnil KumarNoch keine Bewertungen
- Embd Course Pamplet - 3 - 4monthsDokument2 SeitenEmbd Course Pamplet - 3 - 4monthsThanigai Arasu RuthirakottiNoch keine Bewertungen
- C++ PracticalDokument107 SeitenC++ PracticalShaikhAmnaNoch keine Bewertungen
- Operating Systems (MCQ)Dokument26 SeitenOperating Systems (MCQ)Mian Hasham Azhar AZHARNoch keine Bewertungen
- Microsoft PowerPoint - SoC Design Flow Tools CodesignDokument110 SeitenMicrosoft PowerPoint - SoC Design Flow Tools CodesignRathan NNoch keine Bewertungen
- Assignment 1Dokument3 SeitenAssignment 1JAYAPAL MNoch keine Bewertungen
- MC0080 Analysis and Design of AlgorithmsDokument15 SeitenMC0080 Analysis and Design of AlgorithmsGaurav Singh JantwalNoch keine Bewertungen
- Heart Rate Variability: Measures and ModelsDokument84 SeitenHeart Rate Variability: Measures and Modelsygh100% (1)
- Embedded Syllabus With C ClassDokument3 SeitenEmbedded Syllabus With C ClassRakesh RakiNoch keine Bewertungen
- Algorithms For Parallel MachinesDokument7 SeitenAlgorithms For Parallel Machinesshinde_jayesh2005Noch keine Bewertungen
- Hands On PythonDokument123 SeitenHands On PythonRohit Vishal Kumar100% (1)
- R05 411104ertsDokument8 SeitenR05 411104ertsravitejakotiNoch keine Bewertungen
- Android Architecture ComponentsDokument106 SeitenAndroid Architecture ComponentsAsad Butt100% (1)
- C# FaqDokument19 SeitenC# Faqapi-3748960Noch keine Bewertungen
- Operating System Exercises - Chapter 11-SolDokument4 SeitenOperating System Exercises - Chapter 11-SolevilanubhavNoch keine Bewertungen
- Embedded Systems - MSC Sem III (Final)Dokument162 SeitenEmbedded Systems - MSC Sem III (Final)nNoch keine Bewertungen
- Memory ManagementDokument10 SeitenMemory ManagementSaroj MisraNoch keine Bewertungen
- Data Mining QuestionsDokument7 SeitenData Mining QuestionsPritam SahaNoch keine Bewertungen
- Introduction To Embedded SystemsDokument14 SeitenIntroduction To Embedded SystemsrajeshNoch keine Bewertungen
- RtosDokument42 SeitenRtospipul36Noch keine Bewertungen
- GPUDokument17 SeitenGPUJayanti SinghNoch keine Bewertungen
- HDL FundamentalsDokument1 SeiteHDL FundamentalsDINESH100% (1)
- Question BankDokument10 SeitenQuestion BankgurugovanNoch keine Bewertungen
- Real-Time Operating System (RTOS) Based Embedded System DesignDokument39 SeitenReal-Time Operating System (RTOS) Based Embedded System DesignShamitha HiremathNoch keine Bewertungen
- Operating Systems - ProcessesDokument25 SeitenOperating Systems - ProcessesShraddha PatelNoch keine Bewertungen
- UNIX Internals: Rohit JnagalDokument36 SeitenUNIX Internals: Rohit Jnagalshery_agNoch keine Bewertungen
- Opeationg Systems - Process Notion - Week 2Dokument24 SeitenOpeationg Systems - Process Notion - Week 2Dali BelaibaNoch keine Bewertungen
- Government College of Engineering, Nagpur: Operating System III Semester/ CSE (2021-2022)Dokument60 SeitenGovernment College of Engineering, Nagpur: Operating System III Semester/ CSE (2021-2022)Vishal KesharwaniNoch keine Bewertungen
- Unit Iv Rtos Based Embedded System DesignDokument11 SeitenUnit Iv Rtos Based Embedded System DesignKartheeswari Saravanan100% (1)
- Package ImitadorDokument20 SeitenPackage ImitadorAlexander AcostaNoch keine Bewertungen
- Operating System FundamentalsDokument6 SeitenOperating System FundamentalsGuruKPO100% (2)
- Operating SystemDokument2 SeitenOperating SystemShabdik ChakrabortyNoch keine Bewertungen
- DS Chapter 3Dokument39 SeitenDS Chapter 3Maddula PrasadNoch keine Bewertungen
- Data-Parallel Architectures andDokument27 SeitenData-Parallel Architectures andAmeed UddinNoch keine Bewertungen
- tracesPD1502F EX A 2.3.7 SystemServer WDT28 Jan 13 49 37.168Dokument144 SeitentracesPD1502F EX A 2.3.7 SystemServer WDT28 Jan 13 49 37.168Nurul MentariNoch keine Bewertungen
- Distributed computing systems explainedDokument1 SeiteDistributed computing systems explainedNavin ChinnusamyNoch keine Bewertungen
- Velikanovs - Performance Tuning and Troubleshooting For Oracle OC4JDokument35 SeitenVelikanovs - Performance Tuning and Troubleshooting For Oracle OC4Jrockerabc123100% (2)
- Experiment 7 - PDCDokument5 SeitenExperiment 7 - PDCKaran ThakkarNoch keine Bewertungen
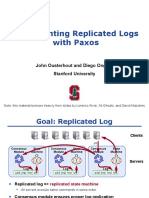
- Implementing Replicated Logs With Paxos: John Ousterhout and Diego Ongaro Stanford UniversityDokument33 SeitenImplementing Replicated Logs With Paxos: John Ousterhout and Diego Ongaro Stanford UniversityNarasimha Murthy GangaiahNoch keine Bewertungen
- RTOS Class NotesDokument15 SeitenRTOS Class NotesYogesh Misra100% (1)
- Operating System SolutionsDokument7 SeitenOperating System SolutionsergrehgeNoch keine Bewertungen
- Distributed Programming Using Java: Quick Recap: UNIT-1Dokument23 SeitenDistributed Programming Using Java: Quick Recap: UNIT-1Pavan PulicherlaNoch keine Bewertungen
- Lesson04-Concurrency ControlDokument76 SeitenLesson04-Concurrency ControlDanielNoch keine Bewertungen
- Vortex: Opencl Compatible Risc-V Gpgpu: Fares Elsabbagh Blaise Tine Priyadarshini Roshan Ethan Lyons Euna KimDokument7 SeitenVortex: Opencl Compatible Risc-V Gpgpu: Fares Elsabbagh Blaise Tine Priyadarshini Roshan Ethan Lyons Euna KimhiraNoch keine Bewertungen
- Generate Mapping Process FailsDokument80 SeitenGenerate Mapping Process FailsKalieswaran0% (1)
- To HPC With MPI For Data Science: Frank NielsenDokument304 SeitenTo HPC With MPI For Data Science: Frank NielsenِAhmed Jebur AliNoch keine Bewertungen
- Final Lab Exam - UGRD-CS6203C Object Oriented ProgrammingDokument3 SeitenFinal Lab Exam - UGRD-CS6203C Object Oriented Programmingyhu FULNoch keine Bewertungen
- MAP UNIT 4 MCQDokument6 SeitenMAP UNIT 4 MCQGEO MERIN100% (1)
- FCC SyllabusDokument2 SeitenFCC SyllabusSelvaraj DNoch keine Bewertungen
- Cloud Application Development with ThreadsDokument28 SeitenCloud Application Development with ThreadsBunny HoneyNoch keine Bewertungen
- Tarea de Programación II Con Interfaces GraficasDokument30 SeitenTarea de Programación II Con Interfaces GraficasRONIEL DE JESUS RODRIGUEZ COLONNoch keine Bewertungen
- Module 3.1Dokument16 SeitenModule 3.1nida61325Noch keine Bewertungen
- Chapter 7-Consistency and ReplicationDokument78 SeitenChapter 7-Consistency and ReplicationGebreigziabher M. AbNoch keine Bewertungen
- Parallelizing SystemC Kernel For Fast Hardware Simulation On SMP MachinesDokument8 SeitenParallelizing SystemC Kernel For Fast Hardware Simulation On SMP MachinesNguyen Tuan AnhNoch keine Bewertungen
- TPLDokument397 SeitenTPLNapata JohnNoch keine Bewertungen
- MCSE 011 Previous Year Question Papers by IgnouassignmentguruDokument50 SeitenMCSE 011 Previous Year Question Papers by IgnouassignmentguruIGNOU GURUNoch keine Bewertungen
- Spark IntroductionDokument19 SeitenSpark Introductionalpha0Noch keine Bewertungen
- Chapter 5 RtsDokument30 SeitenChapter 5 RtsNazrul AjarNoch keine Bewertungen