Das könnte Ihnen auch gefallen
- Resume Format SampleDokument2 SeitenResume Format SampleDozdi100% (1)
- Instrumentation Symbols & StandardsDokument15 SeitenInstrumentation Symbols & StandardsS Bharadwaj Reddy100% (3)
- Technical Report PDFDokument184 SeitenTechnical Report PDFSrinivasan RajenderanNoch keine Bewertungen
- Biological ExerciseDokument6 SeitenBiological ExerciseTanmoy BasakNoch keine Bewertungen
- NASA ERAST Program Develops High-Altitude UAVsDokument17 SeitenNASA ERAST Program Develops High-Altitude UAVsEgz AguilarNoch keine Bewertungen
- 43 (Lecture - Instrumentation For P&ID's - Cookbook)Dokument55 Seiten43 (Lecture - Instrumentation For P&ID's - Cookbook)Trí NguyễnNoch keine Bewertungen
- Instrumentation HandbookDokument315 SeitenInstrumentation Handbookarvindron67% (6)
- CRSP ManualDokument140 SeitenCRSP ManualCarlos Andrés Buenahora BallesterosNoch keine Bewertungen
- RPVP Puerto PrincesaDokument8 SeitenRPVP Puerto PrincesaRanny LomibaoNoch keine Bewertungen
- .Process Instrument and Control (Week1 - 2) - 1681659856000Dokument230 Seiten.Process Instrument and Control (Week1 - 2) - 1681659856000NonsoNoch keine Bewertungen
- Basic InstrumentationDokument1.788 SeitenBasic Instrumentationchandruhbkk75% (4)
- Ball MillsDokument8 SeitenBall MillsBoy Alfredo PangaribuanNoch keine Bewertungen
- Loop CheckDokument9 SeitenLoop CheckyangherNoch keine Bewertungen
- The Necessity of The Unity of Iranian PeopleDokument23 SeitenThe Necessity of The Unity of Iranian PeopleDozdi100% (1)
- Chapter 6 Control System DocumentationDokument14 SeitenChapter 6 Control System DocumentationMahmoud Mostafa HamzawiNoch keine Bewertungen
- Sample Problem #1Dokument7 SeitenSample Problem #1DozdiNoch keine Bewertungen
- Instrumentation CablesDokument7 SeitenInstrumentation Cablesrenjithv_4Noch keine Bewertungen
- ESD 18-91-067 - Instruction Manual and Parts List - Ed. 305Dokument208 SeitenESD 18-91-067 - Instruction Manual and Parts List - Ed. 305Centrifugal SeparatorNoch keine Bewertungen
- 11process Control Fundamentals PDFDokument59 Seiten11process Control Fundamentals PDFshubhamNoch keine Bewertungen
- Sample Problem #11Dokument6 SeitenSample Problem #11Dozdi100% (4)
- Basic Inst.Dokument15 SeitenBasic Inst.mahesh4975Noch keine Bewertungen
- Sample Problem #8Dokument8 SeitenSample Problem #8DozdiNoch keine Bewertungen
- Senior Instrumentation Technician: Passbooks Study GuideVon EverandSenior Instrumentation Technician: Passbooks Study GuideBewertung: 5 von 5 Sternen5/5 (1)
- Instrumentation EngineeringDokument19 SeitenInstrumentation EngineeringKuldeepsingh ChandelNoch keine Bewertungen
- Controls & InstrumentationDokument23 SeitenControls & Instrumentationसचिन उरुणकर100% (1)
- Sensorselection and PlacementDokument4 SeitenSensorselection and Placementnirbhay111Noch keine Bewertungen
- DistillationDokument21 SeitenDistillationDozdi100% (1)
- Basic of Instrumentation EyassDokument34 SeitenBasic of Instrumentation EyassLu'ay ElyaeNoch keine Bewertungen
- Solid-Liquid Extraction (Leaching)Dokument4 SeitenSolid-Liquid Extraction (Leaching)Dozdi83% (6)
- En00w4 2011Dokument45 SeitenEn00w4 2011knightfelix12Noch keine Bewertungen
- Sample Problem #22Dokument8 SeitenSample Problem #22Dozdi0% (1)
- InstrumentationDokument83 SeitenInstrumentationanuradha19100% (2)
- Distributed Control System A Complete Guide - 2020 EditionVon EverandDistributed Control System A Complete Guide - 2020 EditionNoch keine Bewertungen
- Sample Problem #7Dokument16 SeitenSample Problem #7Dozdi97% (35)
- Basic Instrumentation and Process ControlDokument2 SeitenBasic Instrumentation and Process ControlathariqubalNoch keine Bewertungen
- ISADokument8 SeitenISAapi-376267467% (3)
- 140358649-CCST Part10Dokument1 Seite140358649-CCST Part10CH1253Noch keine Bewertungen
- Why Calibrate?: How To Create and Sustain An Effective Calibration Program in A GXP EnvironmentDokument21 SeitenWhy Calibrate?: How To Create and Sustain An Effective Calibration Program in A GXP EnvironmentoscarmauripNoch keine Bewertungen
- Advances in Reactor Measurement and Control - McMillan - PrefaceDokument3 SeitenAdvances in Reactor Measurement and Control - McMillan - PrefaceSaimon RintoNoch keine Bewertungen
- Changing Process Control Strategies with a DCSDokument1 SeiteChanging Process Control Strategies with a DCSCH1253Noch keine Bewertungen
- Basics of Instrumentation TheoryDokument63 SeitenBasics of Instrumentation TheorysanthoshramrNoch keine Bewertungen
- Instrumentation and Control Valves 1Dokument31 SeitenInstrumentation and Control Valves 1Ahmed ElShoraNoch keine Bewertungen
- En00w4 2011 PDFDokument45 SeitenEn00w4 2011 PDFmhaioocNoch keine Bewertungen
- PIDtutorialDokument13 SeitenPIDtutorialalijnubyNoch keine Bewertungen
- Qamar Hassan Iqbal CVDokument2 SeitenQamar Hassan Iqbal CVQamar Hassan IqbalNoch keine Bewertungen
- Flow Instrumentation 101: Dave SchmittDokument62 SeitenFlow Instrumentation 101: Dave SchmittAhmed HusseinNoch keine Bewertungen
- Fuzzy Logic Expert System For Diagnose Decreased Efficiency of Power PlantDokument1 SeiteFuzzy Logic Expert System For Diagnose Decreased Efficiency of Power PlantKingRogerNoch keine Bewertungen
- Chap 1a - Instrumentation and PID DiagramDokument20 SeitenChap 1a - Instrumentation and PID Diagramraj varmanNoch keine Bewertungen
- Mil HDBK 189Dokument155 SeitenMil HDBK 189imatafernandezNoch keine Bewertungen
- Instrument Interview Question For Petro Chemical IndustriesDokument4 SeitenInstrument Interview Question For Petro Chemical IndustriespraveenteckieNoch keine Bewertungen
- Unique Name Text Definition SourceDokument147 SeitenUnique Name Text Definition SourcemuthoiNoch keine Bewertungen
- Control Valve Operation and Design Criteria For Beginners 1Dokument4 SeitenControl Valve Operation and Design Criteria For Beginners 1Bobismy Alterego BobNoch keine Bewertungen
- My Top Skills:-: Short BioDokument7 SeitenMy Top Skills:-: Short BiosanchayanNoch keine Bewertungen
- Pneumatic Actuator FundamentalsDokument84 SeitenPneumatic Actuator Fundamentalsheru hsNoch keine Bewertungen
- Lecture Note Chapter 11 PID Controller Design Tuning and Troubleshooting 2016Dokument61 SeitenLecture Note Chapter 11 PID Controller Design Tuning and Troubleshooting 2016Rama KrishnaNoch keine Bewertungen
- Boiler Instrumentation and ControlsDokument23 SeitenBoiler Instrumentation and Controlshayat umar bhat100% (4)
- Distributed Computer Control System: Proceedings of the IFAC Workshop, Tampa, Florida, U.S.A., 2-4 October 1979Von EverandDistributed Computer Control System: Proceedings of the IFAC Workshop, Tampa, Florida, U.S.A., 2-4 October 1979T. J. HarrisonNoch keine Bewertungen
- Process Control System A Complete Guide - 2020 EditionVon EverandProcess Control System A Complete Guide - 2020 EditionNoch keine Bewertungen
- RIRMeasurementAndAnalysis PDFDokument22 SeitenRIRMeasurementAndAnalysis PDFLucio BianchiNoch keine Bewertungen
- Introduction To WaveletDokument26 SeitenIntroduction To WaveletSridhar Koneru VenkkatNoch keine Bewertungen
- 25.108 - Digital Filter Design Using FDAToolDokument23 Seiten25.108 - Digital Filter Design Using FDAToolJibran SiddiquiNoch keine Bewertungen
- SparseTQWT SlidesDokument53 SeitenSparseTQWT Slidesadityap9003Noch keine Bewertungen
- Array ProcessingDokument24 SeitenArray ProcessingAbeer ChaudhryNoch keine Bewertungen
- Discrete SystemsDokument12 SeitenDiscrete SystemsjoukendNoch keine Bewertungen
- Espectro de Respuesta para Diseño Nec 15: TablasDokument22 SeitenEspectro de Respuesta para Diseño Nec 15: TablasIng. Jaime Vinicio Camacho SolisNoch keine Bewertungen
- CodingDokument10 SeitenCodingUbaid ullahNoch keine Bewertungen
- Csaapt Tran 2017Dokument20 SeitenCsaapt Tran 2017Leandro González De CeccoNoch keine Bewertungen
- Exercise B3 Introductory Experimental Dynamics: Authors: Submitted (Date) : 2019-09-23 Approved by (Name/date)Dokument5 SeitenExercise B3 Introductory Experimental Dynamics: Authors: Submitted (Date) : 2019-09-23 Approved by (Name/date)xiaoqi wangNoch keine Bewertungen
- Analisa Sinyal NonstasionerDokument26 SeitenAnalisa Sinyal NonstasionerNada FasolaNoch keine Bewertungen
- AC to AC Converter ChaptersDokument25 SeitenAC to AC Converter ChaptersReeta DuttaNoch keine Bewertungen
- Calculations of Scattered MotionDokument3 SeitenCalculations of Scattered MotionMahmoud MadanyNoch keine Bewertungen
- Short-Time Fourier TransformDokument27 SeitenShort-Time Fourier TransformAngel Jose Lozada Das DoresNoch keine Bewertungen
- Chapter6solutions PDFDokument34 SeitenChapter6solutions PDFBeauponte Pouky MezonlinNoch keine Bewertungen
- BP8113 Advanced Medical Imaging: Instructor: Yuan Xu Office: KHS-331-D Email: Yxu@ryerson - CaDokument42 SeitenBP8113 Advanced Medical Imaging: Instructor: Yuan Xu Office: KHS-331-D Email: Yxu@ryerson - CaIntesar ZalloumNoch keine Bewertungen
- STFT Analysis of Signals with Changing Frequency ContentDokument14 SeitenSTFT Analysis of Signals with Changing Frequency ContentArief Muhammad LubisNoch keine Bewertungen
- Sample Problem #11:: Solve This Problem by Graphical MethodDokument5 SeitenSample Problem #11:: Solve This Problem by Graphical MethodDozdi100% (1)
- Standards Are Boring. Think Twice...Dokument5 SeitenStandards Are Boring. Think Twice...DozdiNoch keine Bewertungen
- Sample Problem #10Dokument7 SeitenSample Problem #10Dozdi100% (1)
- Sample Problem #16Dokument9 SeitenSample Problem #16Dozdi100% (8)
- Sample Problem #20Dokument8 SeitenSample Problem #20Dozdi100% (1)
- Sample Problem #21Dokument11 SeitenSample Problem #21Dozdi50% (2)
- Sample Problem #15Dokument10 SeitenSample Problem #15Dozdi100% (1)
- Sample Problem #18Dokument8 SeitenSample Problem #18Dozdi100% (1)
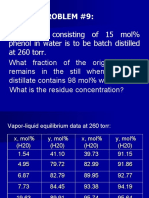
- Sample Problem #9Dokument10 SeitenSample Problem #9Dozdi100% (1)
- Different Feed Conditions Sample Problem #19:: F. Average F and 15,000 Btu/lb-MoleDokument8 SeitenDifferent Feed Conditions Sample Problem #19:: F. Average F and 15,000 Btu/lb-MoleDozdiNoch keine Bewertungen
- Sample Problem #17Dokument10 SeitenSample Problem #17Dozdi100% (10)
- Sample Problem #14Dokument7 SeitenSample Problem #14DozdiNoch keine Bewertungen
- Sample Problem #13Dokument4 SeitenSample Problem #13DozdiNoch keine Bewertungen
- Sample Problem #5Dokument12 SeitenSample Problem #5DozdiNoch keine Bewertungen
- Sample Problem #12Dokument5 SeitenSample Problem #12DozdiNoch keine Bewertungen
- Sample Problem #3Dokument2 SeitenSample Problem #3Dozdi0% (1)
- Sample Problem #4Dokument5 SeitenSample Problem #4DozdiNoch keine Bewertungen
- Sample Problem #6Dokument4 SeitenSample Problem #6Dozdi100% (1)
- Sample Problem #2Dokument7 SeitenSample Problem #2DozdiNoch keine Bewertungen
- Distillation: An IntroductionDokument24 SeitenDistillation: An IntroductionDozdi100% (1)
- Sample Problem #10Dokument5 SeitenSample Problem #10DozdiNoch keine Bewertungen
- AGA-3 Comparison Normal BetaDokument12 SeitenAGA-3 Comparison Normal BetahailriqNoch keine Bewertungen
- BDOs SheetsDokument25 SeitenBDOs Sheets3J Solutions BDNoch keine Bewertungen
- Android Tutorial - Broadcast ReceiversDokument15 SeitenAndroid Tutorial - Broadcast ReceiversTrieu Ngo HuyNoch keine Bewertungen
- TI Oxydur PTB 206 - en PDFDokument5 SeitenTI Oxydur PTB 206 - en PDFgonzalogvargas01100% (1)
- Vismat Material V-Ray For SketchupDokument19 SeitenVismat Material V-Ray For SketchupAmer GonzalesNoch keine Bewertungen
- Earth Gravity and Satellite Orbits CalculationsDokument9 SeitenEarth Gravity and Satellite Orbits CalculationsYoobsan Asaffaa FufaaNoch keine Bewertungen
- Plasticizer From Vegetable Oil DerivativesDokument8 SeitenPlasticizer From Vegetable Oil Derivativesilan chertokNoch keine Bewertungen
- CP 05 - Determine The Young S Modulus of A MaterialDokument2 SeitenCP 05 - Determine The Young S Modulus of A MaterialABBIE ROSENoch keine Bewertungen
- Vacuum Chill BlockDokument2 SeitenVacuum Chill BlockAditheya Varthan MNoch keine Bewertungen
- HVCB Timing ApplicationDokument52 SeitenHVCB Timing Applicationbhuban mohanNoch keine Bewertungen
- GDCF 2 240 - 2nd - 01 10Dokument2 SeitenGDCF 2 240 - 2nd - 01 10edgardomichligNoch keine Bewertungen
- DWTS, WDWTS: Improving MRI Image Reconstruction with Directional Wavelet ThresholdingDokument1 SeiteDWTS, WDWTS: Improving MRI Image Reconstruction with Directional Wavelet ThresholdingSumit ChakravartyNoch keine Bewertungen
- Sant Gadge Baba Amravati University: Backlog From Session Winter-2019Dokument2 SeitenSant Gadge Baba Amravati University: Backlog From Session Winter-2019Prashant pandeNoch keine Bewertungen
- Multi-disciplinary profile of IS/IT outsourcing researchDokument47 SeitenMulti-disciplinary profile of IS/IT outsourcing researchIsabel MirandaNoch keine Bewertungen
- Ma-Mscmt-10 J16Dokument5 SeitenMa-Mscmt-10 J16Dilip BhatiNoch keine Bewertungen
- Emp2 Box Pressure TransmitterDokument8 SeitenEmp2 Box Pressure TransmitterAsif HameedNoch keine Bewertungen
- Mycom Nims ProptimaDokument4 SeitenMycom Nims ProptimasamnemriNoch keine Bewertungen
- PL-BRICK HP 2850 740 2X6: Product DatasheetDokument4 SeitenPL-BRICK HP 2850 740 2X6: Product DatasheetAbhilash ThomasNoch keine Bewertungen
- Company Profile 2021Dokument18 SeitenCompany Profile 2021Hamza FaheemNoch keine Bewertungen
- Deterministic Inventory Control FormulasDokument6 SeitenDeterministic Inventory Control FormulasvivekNoch keine Bewertungen
- List of Diagnostic Trouble Code (DTC)Dokument5 SeitenList of Diagnostic Trouble Code (DTC)Dev Vrat BohraNoch keine Bewertungen
- Elective-II: Pavement Analysis & Design: B.E. (Civil Engineering) Eighth Semester (C.B.S.)Dokument6 SeitenElective-II: Pavement Analysis & Design: B.E. (Civil Engineering) Eighth Semester (C.B.S.)Adesh DeshbhratarNoch keine Bewertungen
- Cap 3 CutoffDokument51 SeitenCap 3 CutoffYashraj KajaveNoch keine Bewertungen