Das könnte Ihnen auch gefallen
- 6.1. Concept of Power FactorDokument10 Seiten6.1. Concept of Power FactormahaprabuasNoch keine Bewertungen
- Introduction To Power ElectronicsDokument23 SeitenIntroduction To Power ElectronicsNovie Ayub WindarkoNoch keine Bewertungen
- Resonant TransformerDokument15 SeitenResonant TransformerfelogonzaNoch keine Bewertungen
- Reference Identification To ISO 1219-2 And/or EN 81346-2Dokument4 SeitenReference Identification To ISO 1219-2 And/or EN 81346-2Carlos FernandoNoch keine Bewertungen
- Machines II 2 MarksDokument25 SeitenMachines II 2 MarksRajasekaran ViswanathanNoch keine Bewertungen
- Introduction To DC GeneratorDokument119 SeitenIntroduction To DC GeneratorFaraz HussainNoch keine Bewertungen
- Motor5. AC Motors and GeneratorsDokument193 SeitenMotor5. AC Motors and GeneratorssooksukonNoch keine Bewertungen
- Automatic Generation ControlDokument5 SeitenAutomatic Generation ControlMuhammad Nizamuddin100% (1)
- Mcqs Preparation For Engineering Competitive ExamsDokument11 SeitenMcqs Preparation For Engineering Competitive ExamsHussam GujjarNoch keine Bewertungen
- UNIT-III Transmission Line ParametersDokument69 SeitenUNIT-III Transmission Line ParametersManish MadhuNoch keine Bewertungen
- Induction Type RelaysDokument8 SeitenInduction Type RelayshilalsherNoch keine Bewertungen
- Induction Motors Equivalent CircuitDokument27 SeitenInduction Motors Equivalent Circuitk rajendraNoch keine Bewertungen
- Speed Control of 3-Phase IMDokument19 SeitenSpeed Control of 3-Phase IMpramana_gmritNoch keine Bewertungen
- 192 - EE8301, EE6401 Electrical Machines I - Question Bank 3Dokument15 Seiten192 - EE8301, EE6401 Electrical Machines I - Question Bank 3Kaleeswari SaraswathiNoch keine Bewertungen
- Three Phase Induction MotorDokument21 SeitenThree Phase Induction MotorPrianshu JyosyulaNoch keine Bewertungen
- (4-2) Synchronous GeneratorDokument35 Seiten(4-2) Synchronous Generatorfarah haniNoch keine Bewertungen
- 360 Topic 6 DC MachineDokument33 Seiten360 Topic 6 DC MachineAchsan ArfandiNoch keine Bewertungen
- Back To Basics - The Fundamentals of 4-20 MA Current Loops - Precision DigitalDokument5 SeitenBack To Basics - The Fundamentals of 4-20 MA Current Loops - Precision DigitalJason FloydNoch keine Bewertungen
- Microsoft PowerPoint - LECTURE - 6-1 - InverterDokument48 SeitenMicrosoft PowerPoint - LECTURE - 6-1 - InverterShanthu BiswasNoch keine Bewertungen
- Physic 4.1 Cathode Ray OscilloscopeDokument25 SeitenPhysic 4.1 Cathode Ray OscilloscopeSascha WuNoch keine Bewertungen
- Experiment - 12: Power Angle Curve of Syncronous MachineDokument3 SeitenExperiment - 12: Power Angle Curve of Syncronous MachinesanjuNoch keine Bewertungen
- Bridge RectifierDokument27 SeitenBridge Rectifiergirishkumardarisi254100% (1)
- Unit IIDokument194 SeitenUnit IIMuniyasamyNoch keine Bewertungen
- Single Phase TransformerDokument41 SeitenSingle Phase Transformerwtegar100% (1)
- DCMTDokument37 SeitenDCMTGloria HolcombNoch keine Bewertungen
- 306 DC Machines PDFDokument95 Seiten306 DC Machines PDFAlaa JawadNoch keine Bewertungen
- Switch Gear SlideDokument54 SeitenSwitch Gear SlidebutunsonaNoch keine Bewertungen
- Synchronous MotorsDokument25 SeitenSynchronous MotorsParvesh NainNoch keine Bewertungen
- Oscillator: RC Phase Shift OscillatorDokument9 SeitenOscillator: RC Phase Shift OscillatorNishiya VijayanNoch keine Bewertungen
- Chapter 3 Synchronous GeneratorDokument21 SeitenChapter 3 Synchronous Generatorahmad abufaresNoch keine Bewertungen
- Transformers Objective Type Questions and AnswersDokument11 SeitenTransformers Objective Type Questions and AnswersJabir Sijas100% (1)
- Notes 1Dokument68 SeitenNotes 1Vo SantosNoch keine Bewertungen
- Lecture Objectives: Working Principle of Alternator OR Synchronous Generator StatorDokument5 SeitenLecture Objectives: Working Principle of Alternator OR Synchronous Generator StatorZ_JahangeerNoch keine Bewertungen
- 151-EE-306-01-03-DC MachinesDokument67 Seiten151-EE-306-01-03-DC MachinesAly Ashraf100% (1)
- UNIT-1 DC Machines: ConstructionDokument54 SeitenUNIT-1 DC Machines: ConstructionT.ThilagamaniNoch keine Bewertungen
- PCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveDokument5 SeitenPCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveJanup PokharelNoch keine Bewertungen
- Electro-Thermal Analysis of An Induction MotorDokument5 SeitenElectro-Thermal Analysis of An Induction MotorS Bharadwaj Reddy100% (1)
- DC MotorDokument53 SeitenDC MotorK04Anoushka TripathiNoch keine Bewertungen
- Unit2 MachinesDokument35 SeitenUnit2 MachinesdineshkumarNoch keine Bewertungen
- SynchmachineDokument27 SeitenSynchmachinesrinimeha@gmail.comNoch keine Bewertungen
- CHAPTER 3 - Transducer and Sensors PDFDokument49 SeitenCHAPTER 3 - Transducer and Sensors PDFROYALNEWSS100% (1)
- EE 442 642 IntroductionDokument14 SeitenEE 442 642 IntroductionUSERNAME12340987Noch keine Bewertungen
- 14 - 124 TOP Synchronous Motors - Electrical Engineering Multiple Choice Questions and Answers - MCQs Preparation For Engineering Competitive ExamsDokument13 Seiten14 - 124 TOP Synchronous Motors - Electrical Engineering Multiple Choice Questions and Answers - MCQs Preparation For Engineering Competitive ExamsHussam Gujjar100% (1)
- Electrical Safety by EarthingDokument36 SeitenElectrical Safety by EarthingS Bharadwaj ReddyNoch keine Bewertungen
- Chapter-2: Dynamic Behavior of Electric DrivesDokument43 SeitenChapter-2: Dynamic Behavior of Electric DrivesMuket AgmasNoch keine Bewertungen
- Commutation TechniquesDokument13 SeitenCommutation TechniquesSantosh SinghNoch keine Bewertungen
- Experiment 4 - Three Phase Uncontrolled RectifierDokument13 SeitenExperiment 4 - Three Phase Uncontrolled RectifierAaaa DdddNoch keine Bewertungen
- Ferranti Effect and Skin EffectDokument8 SeitenFerranti Effect and Skin EffectMaaz KhanNoch keine Bewertungen
- Why Transformer Does Not Work On DC Supply Instead of ACDokument4 SeitenWhy Transformer Does Not Work On DC Supply Instead of ACAHMED YOUSEFNoch keine Bewertungen
- Active Harmonic FilterDokument8 SeitenActive Harmonic FilterKanai BanerjeeNoch keine Bewertungen
- Ac Series MotorDokument15 SeitenAc Series MotorMani Balaji TNoch keine Bewertungen
- AC MachinesDokument30 SeitenAC MachinesAnonymous 5GBBc45Noch keine Bewertungen
- Types of ResistorDokument9 SeitenTypes of ResistorManuel Panotes ReantazoNoch keine Bewertungen
- Lecture 07 - Synchronous MachinesDokument98 SeitenLecture 07 - Synchronous Machinesramkiran1989100% (1)
- Chapter 7 Induction MotorsDokument34 SeitenChapter 7 Induction MotorslalaNoch keine Bewertungen
- Superposition TheoremDokument48 SeitenSuperposition Theoremandrew smithNoch keine Bewertungen
- Lecture-8DC MachinesDokument55 SeitenLecture-8DC MachinesBisrat TeferiNoch keine Bewertungen
- ALTERNATORDokument7 SeitenALTERNATOR221 Siddhant shitoleNoch keine Bewertungen
- Bahir Dar University Technology of Institute: School of Computing and Electrical EngineeringDokument55 SeitenBahir Dar University Technology of Institute: School of Computing and Electrical Engineeringkrishnareddy_chintala0% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Solar LightDokument6 SeitenSolar Lightstraf238Noch keine Bewertungen
- Smart Grid Fault Location, Isolation, and Service Restoration (FLISR) Solutions To Manage Operational and Capital ExpendituresDokument6 SeitenSmart Grid Fault Location, Isolation, and Service Restoration (FLISR) Solutions To Manage Operational and Capital ExpendituresbaoHVLABNoch keine Bewertungen
- Boiler and Boiler CalculationsDokument7 SeitenBoiler and Boiler CalculationsChaya Stia ClaluiNoch keine Bewertungen
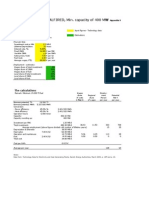
- STEAM TURBINE, COALFIRED, Min. Capacity of 400 MW: Starting Point: Fuel SupplyDokument2 SeitenSTEAM TURBINE, COALFIRED, Min. Capacity of 400 MW: Starting Point: Fuel Supplypqhieudpm_658263372Noch keine Bewertungen
- Unsw Arc PV Anrep 2010-11Dokument132 SeitenUnsw Arc PV Anrep 2010-11aghaNoch keine Bewertungen
- Lack of Fusion PDFDokument6 SeitenLack of Fusion PDFDhinesh GnanadhasNoch keine Bewertungen
- Peda PDFDokument16 SeitenPeda PDFEnergy ProfessionalsNoch keine Bewertungen
- Is The Total Incident On A Surface, Per UnitDokument3 SeitenIs The Total Incident On A Surface, Per Unitlyheang100% (1)
- Pump Energy Efficiency Calculation ToolDokument8 SeitenPump Energy Efficiency Calculation ToolSoma NathanNoch keine Bewertungen
- Alkanes: H H C H HDokument6 SeitenAlkanes: H H C H HAmirah AmanNoch keine Bewertungen
- Overview of MicrogridsDokument19 SeitenOverview of Microgridstushar borkarNoch keine Bewertungen
- FAULT CODE 259 - Fuel Shutoff Valve - Stuck Open: File: 88-t05-259 Page 1 of 6Dokument6 SeitenFAULT CODE 259 - Fuel Shutoff Valve - Stuck Open: File: 88-t05-259 Page 1 of 6LuisDelaHozNoch keine Bewertungen
- EX Solar ModuleDokument2 SeitenEX Solar ModuleBuwana luhurNoch keine Bewertungen
- Ch5 ReviewQ StudyGuideDokument12 SeitenCh5 ReviewQ StudyGuideMHD ILHAMNoch keine Bewertungen
- Design and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsDokument12 SeitenDesign and Analysis of 42-V Permanent-Magnet Generator For Automotive ApplicationsNicholas ValdezNoch keine Bewertungen
- NPH,+ERC+Case+No +2015-021+MCDokument8 SeitenNPH,+ERC+Case+No +2015-021+MCSamMooreNoch keine Bewertungen
- Group 3 Solar Cleaning ToolDokument69 SeitenGroup 3 Solar Cleaning ToolUdin AnuarNoch keine Bewertungen
- What Is The Correct Tilt Angle For The PV ModuleDokument3 SeitenWhat Is The Correct Tilt Angle For The PV ModuleSunil SinghNoch keine Bewertungen
- Iching AstrologyDokument3 SeitenIching Astrologyjamqureshi100% (3)
- Konan Gbamélé Elisée: Konan - Elisee@univ-Na - CiDokument12 SeitenKonan Gbamélé Elisée: Konan - Elisee@univ-Na - CiGbamélé Elisée KonanNoch keine Bewertungen
- Dry Cooling (RCDC) - ENG (Low) - 2015-06Dokument8 SeitenDry Cooling (RCDC) - ENG (Low) - 2015-06Mehul BansalNoch keine Bewertungen
- Elechome AnswersDokument10 SeitenElechome AnswersLelon OngNoch keine Bewertungen
- Maha Vedha DikshaDokument1 SeiteMaha Vedha DikshaBallakrishnen SubramaniamNoch keine Bewertungen
- Micro Ohmmetre Soudure Aluminothermique CadweldDokument11 SeitenMicro Ohmmetre Soudure Aluminothermique CadweldIsmael Martinez AlvaradoNoch keine Bewertungen
- dfc3000 Product Specifications1Dokument2 Seitendfc3000 Product Specifications1api-249329561Noch keine Bewertungen
- Ammonia Formation ProjectDokument14 SeitenAmmonia Formation ProjectNebyu DanielNoch keine Bewertungen
- Prism 3 RWDokument201 SeitenPrism 3 RWPhuongThuy Dang ThiNoch keine Bewertungen
- Hamidullah Siddiqui PresentationDokument35 SeitenHamidullah Siddiqui PresentationrjchpNoch keine Bewertungen
- Scet Electrical Machine Design Manual Ee-424Dokument81 SeitenScet Electrical Machine Design Manual Ee-424Adel Handi50% (2)