Das könnte Ihnen auch gefallen
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Von EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Noch keine Bewertungen
- At 90 Can 128Dokument428 SeitenAt 90 Can 128Mahmoud AlNoch keine Bewertungen
- MC9S08QE128RMDokument346 SeitenMC9S08QE128RMSergio ContrerasNoch keine Bewertungen
- Microcontrollers LabDokument19 SeitenMicrocontrollers LabAMARNATHNAIDU77Noch keine Bewertungen
- ARM Microcontrollers Programming for Embedded SystemsVon EverandARM Microcontrollers Programming for Embedded SystemsBewertung: 5 von 5 Sternen5/5 (1)
- EEprom 24 C65Dokument25 SeitenEEprom 24 C65ESKALENONoch keine Bewertungen
- 64K 5.0V I C Smart Serial Eeprom: FeaturesDokument16 Seiten64K 5.0V I C Smart Serial Eeprom: FeaturesFerner BriceñoNoch keine Bewertungen
- Doc9166s PDFDokument109 SeitenDoc9166s PDFWaseem WisalNoch keine Bewertungen
- Atmega 32 U 4Dokument433 SeitenAtmega 32 U 4hummbumNoch keine Bewertungen
- MC9S08QE32RMDokument306 SeitenMC9S08QE32RMTato527Noch keine Bewertungen
- Microprocessor Architectures and Systems: RISC, CISC and DSPVon EverandMicroprocessor Architectures and Systems: RISC, CISC and DSPBewertung: 4 von 5 Sternen4/5 (1)
- Atmega 32 U 4Dokument26 SeitenAtmega 32 U 4Bruno PalašekNoch keine Bewertungen
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Von EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Noch keine Bewertungen
- Avr AtmegaDokument309 SeitenAvr AtmegakcraussNoch keine Bewertungen
- ARM-Based Microcontroller Multitasking Projects: Using the FreeRTOS Multitasking KernelVon EverandARM-Based Microcontroller Multitasking Projects: Using the FreeRTOS Multitasking KernelBewertung: 5 von 5 Sternen5/5 (1)
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Dokument13 SeitenDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnNoch keine Bewertungen
- ATtiny 24Dokument238 SeitenATtiny 24cbkulatungeNoch keine Bewertungen
- 8-Bit Single Chip Microcontroller LC87F67C8ADokument27 Seiten8-Bit Single Chip Microcontroller LC87F67C8AAlbert GTNoch keine Bewertungen
- 24LC04BDokument22 Seiten24LC04BcarlosNoch keine Bewertungen
- ARM Based Thumb DUMMYDokument594 SeitenARM Based Thumb DUMMYSwamy SheshuNoch keine Bewertungen
- Microcontroller With 2K Bytes In-System Programmable Flash: FeaturesDokument17 SeitenMicrocontroller With 2K Bytes In-System Programmable Flash: FeaturesGomzalez Bin GembozNoch keine Bewertungen
- Pic Microcontroller 2.1 Pic It Is A Family of Modified Harvard Architecture Microcontrollers MadeDokument16 SeitenPic Microcontroller 2.1 Pic It Is A Family of Modified Harvard Architecture Microcontrollers MadeSuresh KumarNoch keine Bewertungen
- Unit 3 McuDokument23 SeitenUnit 3 McuatulNoch keine Bewertungen
- AT90USB1286Dokument39 SeitenAT90USB1286Alan_88Noch keine Bewertungen
- CMOS Priority Interrupt Controller: Features DescriptionDokument20 SeitenCMOS Priority Interrupt Controller: Features DescriptionWilliamfelix FelixNoch keine Bewertungen
- At91sam7s64 DsDokument491 SeitenAt91sam7s64 DsLord_JoelNoch keine Bewertungen
- At 90 Usb 162Dokument306 SeitenAt 90 Usb 162Lord_JoelNoch keine Bewertungen
- 24 LC 16Dokument12 Seiten24 LC 16Sebastian QuaroneNoch keine Bewertungen
- Atmega 644Dokument376 SeitenAtmega 644binhminhmoiNoch keine Bewertungen
- ATmega32 SummaryDokument18 SeitenATmega32 SummaryRajesh KumarNoch keine Bewertungen
- 8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32ADokument18 Seiten8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32Amiusuario_1022Noch keine Bewertungen
- 4K 5.0V I C Serial EEPROM: Obsolete DeviceDokument14 Seiten4K 5.0V I C Serial EEPROM: Obsolete Devicefrank_grimesNoch keine Bewertungen
- Microcontroller With 16/32/64K Bytes In-System Programmable FlashDokument23 SeitenMicrocontroller With 16/32/64K Bytes In-System Programmable FlashTho HaNoch keine Bewertungen
- TMP91C815F - 16bit Microcontroller TLCS-900 L1 SeriesDokument277 SeitenTMP91C815F - 16bit Microcontroller TLCS-900 L1 SerieskeirgalNoch keine Bewertungen
- PIC16F887 para ImprimirDokument14 SeitenPIC16F887 para ImprimircarlosNoch keine Bewertungen
- Ultrasonic SensorsDokument50 SeitenUltrasonic SensorsJoshNoch keine Bewertungen
- 24 LC 16Dokument32 Seiten24 LC 16josjcrsNoch keine Bewertungen
- CED19I032Dokument20 SeitenCED19I032Pranavram VNoch keine Bewertungen
- Arduino - Arduino LeonardoDokument26 SeitenArduino - Arduino LeonardoBlanca HarperNoch keine Bewertungen
- LC877364ADokument26 SeitenLC877364AAlbert GTNoch keine Bewertungen
- Atmega 8535Dokument20 SeitenAtmega 8535NurcholisNoch keine Bewertungen
- Serial Communication Rv01Dokument29 SeitenSerial Communication Rv01sivaperumalNoch keine Bewertungen
- 8-Bit Microcontroller With 1K Byte Flash Attiny15L: FeaturesDokument6 Seiten8-Bit Microcontroller With 1K Byte Flash Attiny15L: Featuresmanju439Noch keine Bewertungen
- AtMega32 Data SheetDokument313 SeitenAtMega32 Data SheetSumeet TiwanaNoch keine Bewertungen
- PIC16F18855 ModDokument662 SeitenPIC16F18855 Modwhynot05Noch keine Bewertungen
- Serial Communication With AVR Microcontroller Using InterruptsDokument6 SeitenSerial Communication With AVR Microcontroller Using InterruptsManideep Gupta ChikatmarlaNoch keine Bewertungen
- MCP 79410Dokument34 SeitenMCP 79410Krishna SinghNoch keine Bewertungen
- MC9S08DZ60Dokument416 SeitenMC9S08DZ60Benjamin BožičNoch keine Bewertungen
- ECR MachineDokument37 SeitenECR Machineapi-3721578100% (1)
- Encore™ Usb Combination Low-Speed Usb and Ps/2 Peripheral ControllerDokument53 SeitenEncore™ Usb Combination Low-Speed Usb and Ps/2 Peripheral Controllervietanh_askNoch keine Bewertungen
- MC9S08SH32Dokument328 SeitenMC9S08SH32jahenNoch keine Bewertungen
- Evd19i018-Esdp Lab 9Dokument18 SeitenEvd19i018-Esdp Lab 9Jampani sarath chandraNoch keine Bewertungen
- 8-Bit Microcontroller With 2K Bytes of In-System Programmable Flash AT90S2313Dokument92 Seiten8-Bit Microcontroller With 2K Bytes of In-System Programmable Flash AT90S2313nullsoft69Noch keine Bewertungen
- Everything You Want in One Device: Mono PPMDokument4 SeitenEverything You Want in One Device: Mono PPMব্যাচ কোর্ডিনেটরNoch keine Bewertungen
- Interrupt Interface of 8088 - Part1Dokument18 SeitenInterrupt Interface of 8088 - Part1shahd dawoodNoch keine Bewertungen
- Electronic Shop Management SystemDokument4 SeitenElectronic Shop Management SystemAnu Priya100% (1)
- Charged To - : END-USER/UNIT: Planning & Research UnitDokument18 SeitenCharged To - : END-USER/UNIT: Planning & Research UnitShiela GamayonNoch keine Bewertungen
- Install Windows XP On SATA LaptopDokument4 SeitenInstall Windows XP On SATA LaptopSay PhirunNoch keine Bewertungen
- Os Group Assignment Ucd2f1106dit (Se) Ucd2f1106dit AsdDokument4 SeitenOs Group Assignment Ucd2f1106dit (Se) Ucd2f1106dit AsdSagaaboyz Mg RNoch keine Bewertungen
- Embedded System of Shibu K VDokument10 SeitenEmbedded System of Shibu K Vshahebgoudahalladamani0% (1)
- Smec Smec: Reative C Ngineering E Echanic M Imply SDokument37 SeitenSmec Smec: Reative C Ngineering E Echanic M Imply SBahaa DerghamNoch keine Bewertungen
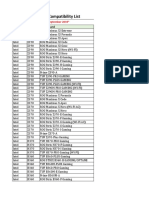
- ASUS Aura Sync Compatible Motherboards v2Dokument3 SeitenASUS Aura Sync Compatible Motherboards v2JuanPablo RomeroNoch keine Bewertungen
- RGBDuino ManualDokument35 SeitenRGBDuino ManualEddy Sorrowful Eyes100% (1)
- Pin Description of The LCD:: MicrocontrollerDokument3 SeitenPin Description of The LCD:: MicrocontrollerRavi Kiran ReddyNoch keine Bewertungen
- Aun Infusomat FM - Error CodeDokument3 SeitenAun Infusomat FM - Error CodesemiconductormanNoch keine Bewertungen
- Tool ComparisonDokument8 SeitenTool ComparisonAndresMenkerNoch keine Bewertungen
- CCMCL301 Computer LiteracyDokument99 SeitenCCMCL301 Computer Literacymbarushimana samuelNoch keine Bewertungen
- By Language 141027 ExcelDokument362 SeitenBy Language 141027 ExcelrivasNoch keine Bewertungen
- Biostar B450MH SpecDokument7 SeitenBiostar B450MH SpecRaul ContrerasNoch keine Bewertungen
- MPC 5606 BRMDokument964 SeitenMPC 5606 BRMhorsecraiovaNoch keine Bewertungen
- ISPnub - Stand-Alone AVR in-System-Programmer Module - FischDokument2 SeitenISPnub - Stand-Alone AVR in-System-Programmer Module - FischNedim CurtNoch keine Bewertungen
- QuatroPod MIniDokument2 SeitenQuatroPod MIniAltana OshadaNoch keine Bewertungen
- Mpi Unit 1Dokument22 SeitenMpi Unit 1sree ramyaNoch keine Bewertungen
- A ZX Spectrum Diagnostic ROM by Phil Ruston - Retroleum - Co.uk Current Version V1.54 / Documentation Date: 05-03-2021Dokument10 SeitenA ZX Spectrum Diagnostic ROM by Phil Ruston - Retroleum - Co.uk Current Version V1.54 / Documentation Date: 05-03-2021Mario Hernández CuelloNoch keine Bewertungen
- Decap010 Programming in CDokument236 SeitenDecap010 Programming in Cabinandanil12Noch keine Bewertungen
- Manual-Dynamite EnglishDokument40 SeitenManual-Dynamite EnglishSERVICE CENTER PABX 085289388205Noch keine Bewertungen
- Exam Embedded SystemDokument2 SeitenExam Embedded Systembirhanu abegazNoch keine Bewertungen
- Parameter ConfigurationDokument1 SeiteParameter ConfigurationKalimas YogyakartaNoch keine Bewertungen
- 3par IzvestajDokument3 Seiten3par Izvestajshele92Noch keine Bewertungen
- Introduction Robot HATDokument16 SeitenIntroduction Robot HATPrasanth SNoch keine Bewertungen
- All in One Inspiron 23 PDFDokument3 SeitenAll in One Inspiron 23 PDFsolquihaNoch keine Bewertungen
- Architecture and Programming of 8051 MicrocontrollersDokument294 SeitenArchitecture and Programming of 8051 MicrocontrollersRomeu Corradi JúniorNoch keine Bewertungen