Das könnte Ihnen auch gefallen
- Chapter 5b Crystal Imperfections Dislocations PDFDokument94 SeitenChapter 5b Crystal Imperfections Dislocations PDFManjeet SinghNoch keine Bewertungen
- Chapter 5b Crystal Imperfections DislocationsDokument99 SeitenChapter 5b Crystal Imperfections DislocationsSubhash KorumilliNoch keine Bewertungen
- Chapter 5b Crystal Imperfections DislocationsDokument94 SeitenChapter 5b Crystal Imperfections DislocationsSayantan DexNoch keine Bewertungen
- Elastic/Plastic Deformation (Chapter 6canggaan)Dokument11 SeitenElastic/Plastic Deformation (Chapter 6canggaan)qc12345Noch keine Bewertungen
- Dislocations and Strengthening Mechanisms: 7 - 1 I N T R o D U C T I o NDokument16 SeitenDislocations and Strengthening Mechanisms: 7 - 1 I N T R o D U C T I o NstevangracianoNoch keine Bewertungen
- Deformation (Engineering) - Wikipedia, The Free EncyclopediaDokument2 SeitenDeformation (Engineering) - Wikipedia, The Free Encyclopediadidodido_67Noch keine Bewertungen
- Plastic Deformation. Dislocations and Strengthening MechanismsDokument20 SeitenPlastic Deformation. Dislocations and Strengthening MechanismsSanit BhatkarNoch keine Bewertungen
- Dislocation Nucleation in The Initial Stage During NanoindentationDokument14 SeitenDislocation Nucleation in The Initial Stage During NanoindentationSatyajit MojumderNoch keine Bewertungen
- MATERIALDokument7 SeitenMATERIALnavneet joshiNoch keine Bewertungen
- Crystal - Imperfections & DislocationsDokument94 SeitenCrystal - Imperfections & DislocationskhurshedlakhoNoch keine Bewertungen
- 08 Plasticity 01 IntroductionDokument11 Seiten08 Plasticity 01 Introductionabhi16Noch keine Bewertungen
- PPT5. SeptIITK - Crystal - Imperfections - DislocationsDokument92 SeitenPPT5. SeptIITK - Crystal - Imperfections - DislocationsKartik Shankar KumbhareNoch keine Bewertungen
- Material Science 2Dokument9 SeitenMaterial Science 2nijju2009Noch keine Bewertungen
- Material Science: Prof. Satish V. KailasDokument34 SeitenMaterial Science: Prof. Satish V. KailasAbir RoyNoch keine Bewertungen
- Ashby 1970 The Deformation of Plastically NonDokument27 SeitenAshby 1970 The Deformation of Plastically Nonkhanabdulrehman077bNoch keine Bewertungen
- Geological Society of America Bulletin 1970 TCHALENKO 1625 40Dokument15 SeitenGeological Society of America Bulletin 1970 TCHALENKO 1625 40Nacho HenriquezNoch keine Bewertungen
- r10 CE 07 04-1mxq325Dokument85 Seitenr10 CE 07 04-1mxq325madanifateh1984Noch keine Bewertungen
- Fundamentals of Deformation - Tec-ScienceDokument8 SeitenFundamentals of Deformation - Tec-ScienceKASHFI UDDINNoch keine Bewertungen
- Chapter 7 - Bebit, Jayvee V.Dokument6 SeitenChapter 7 - Bebit, Jayvee V.Ricky Bonhoc Jr.Noch keine Bewertungen
- Ch-27.1 Basic Concepts On Structure of SolidsDokument46 SeitenCh-27.1 Basic Concepts On Structure of SolidsasjfgauojfgfNoch keine Bewertungen
- Theory of Elasticity-NptelDokument3 SeitenTheory of Elasticity-NptelGeorgeEdwardNoch keine Bewertungen
- Crystal Imperfections DislocationsDokument58 SeitenCrystal Imperfections Dislocationslouis ahmadNoch keine Bewertungen
- Materials Technology: BY A.Vinothkumar Department of Aerospace Engineering SRM UniversityDokument90 SeitenMaterials Technology: BY A.Vinothkumar Department of Aerospace Engineering SRM UniversitykaranmarwahaNoch keine Bewertungen
- Deformation (Engineering) : Materials Science ForceDokument5 SeitenDeformation (Engineering) : Materials Science ForcepajamsaepNoch keine Bewertungen
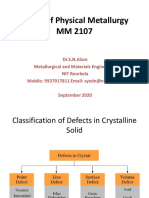
- Basics of Physical Metallurgy MM 2107Dokument22 SeitenBasics of Physical Metallurgy MM 2107srujan baluNoch keine Bewertungen
- Bigoni Noselli FlutterDokument25 SeitenBigoni Noselli FlutterMạnh Thắng BùiNoch keine Bewertungen
- Lecture1 PDFDokument3 SeitenLecture1 PDFshivam18Noch keine Bewertungen
- MMS Unit IDokument7 SeitenMMS Unit IAdula RajasekharNoch keine Bewertungen
- Introduction of PlasticityDokument11 SeitenIntroduction of PlasticityYang LuNoch keine Bewertungen
- Critical Concepts in Material ScienceDokument11 SeitenCritical Concepts in Material SciencePrateek BayalNoch keine Bewertungen
- Assignment # 01 (Mechanics of Solid - I Lab) : Title: Section: Name: Reg No: Submitted To: DatedDokument9 SeitenAssignment # 01 (Mechanics of Solid - I Lab) : Title: Section: Name: Reg No: Submitted To: Datedabid aliNoch keine Bewertungen
- Bonga University: Engineering Material (Meng2091)Dokument59 SeitenBonga University: Engineering Material (Meng2091)Mul'isaa JireenyaaNoch keine Bewertungen
- The Delamination Theory of WearDokument14 SeitenThe Delamination Theory of WearMatheus William CesarNoch keine Bewertungen
- Part Ii Materials Science Course C12: Plasticity and Deformation ProcessingDokument120 SeitenPart Ii Materials Science Course C12: Plasticity and Deformation Processingmma666Noch keine Bewertungen
- Module 1 Theory of PlasticityDokument20 SeitenModule 1 Theory of Plasticityxavier sethuNoch keine Bewertungen
- Soil Dynamics and Earthquake Engineering: Ngoc-Anh Do, Daniel Dias, Pierpaolo Oreste, Irini Djeran-MaigreDokument11 SeitenSoil Dynamics and Earthquake Engineering: Ngoc-Anh Do, Daniel Dias, Pierpaolo Oreste, Irini Djeran-MaigrePaloma CortizoNoch keine Bewertungen
- FyzMat I 3 DislocationsDokument93 SeitenFyzMat I 3 DislocationsCesar Vargas ArayaNoch keine Bewertungen
- Creep Behavior of MaterialsDokument55 SeitenCreep Behavior of Materialsgunapalshetty100% (2)
- Kyoto UniversityDokument26 SeitenKyoto UniversityhieuhuechNoch keine Bewertungen
- Lecture 11: Brittle Deformation Fracture MechanicsDokument31 SeitenLecture 11: Brittle Deformation Fracture MechanicsAlexander Muñoz SánchezNoch keine Bewertungen
- Chapter 9d FractureDokument70 SeitenChapter 9d Fractureamr fouadNoch keine Bewertungen
- Buckling AnalysesDokument15 SeitenBuckling Analysessipasit1518Noch keine Bewertungen
- An Incursion On Punching of Reinforced Concrete Flat SlabsDokument10 SeitenAn Incursion On Punching of Reinforced Concrete Flat Slabsszilard88Noch keine Bewertungen
- One Dislocations: Vacant Vacancy. InterstitialDokument33 SeitenOne Dislocations: Vacant Vacancy. InterstitialAyush Patel (M21MT010)Noch keine Bewertungen
- Bucklewaves: Denzil G. Vaughn, John W. HutchinsonDokument12 SeitenBucklewaves: Denzil G. Vaughn, John W. HutchinsonGuoyun LuNoch keine Bewertungen
- Creep & Shrinkage in ConcreteDokument50 SeitenCreep & Shrinkage in ConcreteJohn TreffNoch keine Bewertungen
- Publication 1 5775 569Dokument22 SeitenPublication 1 5775 569Abdalmalek ShamsanNoch keine Bewertungen
- Chapter 6: Dislocation & Strengthening Mechanism: You Will Learn AboutDokument55 SeitenChapter 6: Dislocation & Strengthening Mechanism: You Will Learn Aboutvenosyah devanNoch keine Bewertungen
- Semi Conducting Materials Misfit Dislocations March 6 2012Dokument58 SeitenSemi Conducting Materials Misfit Dislocations March 6 2012Pradeep SijeriyaNoch keine Bewertungen
- Assignment GeologyDokument9 SeitenAssignment GeologyWaleed Al MesariNoch keine Bewertungen
- Deformation MechDokument7 SeitenDeformation MechShyamol BoseNoch keine Bewertungen
- 15me32 Question Bank Solution MSM - To Upload PDFDokument43 Seiten15me32 Question Bank Solution MSM - To Upload PDFChidu KNoch keine Bewertungen
- Mathematical Modeling of Suspension BridgeDokument16 SeitenMathematical Modeling of Suspension BridgeGirish YumnamNoch keine Bewertungen
- Dynamic Response To Distributed Masses To Variable Velocities For General Classical Boundary ConditionsDokument57 SeitenDynamic Response To Distributed Masses To Variable Velocities For General Classical Boundary ConditionsJimoh SULE Adekunle100% (1)
- Solutions for Biot's Poroelastic Theory in Key Engineering Fields: Theory and ApplicationsVon EverandSolutions for Biot's Poroelastic Theory in Key Engineering Fields: Theory and ApplicationsNoch keine Bewertungen
- A Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsVon EverandA Course of Mathematics for Engineers and Scientists: Volume 3: Theoretical MechanicsBewertung: 1 von 5 Sternen1/5 (1)
- Plastic Flow and Fracture in Solids by Tracy Y ThomasVon EverandPlastic Flow and Fracture in Solids by Tracy Y ThomasNoch keine Bewertungen
- The Mechanical Properties of Wood: Including a Discussion of the Factors Affecting the Mechanical Properties, and Methods of Timber TestingVon EverandThe Mechanical Properties of Wood: Including a Discussion of the Factors Affecting the Mechanical Properties, and Methods of Timber TestingNoch keine Bewertungen
- 1.23.the Tribological Performance of Laser Surface Treated CrZrSiN Thin FilmsDokument5 Seiten1.23.the Tribological Performance of Laser Surface Treated CrZrSiN Thin FilmsSaood AliNoch keine Bewertungen
- Effect of Machining Parameters in Ultrasonic Vibration CuttingDokument10 SeitenEffect of Machining Parameters in Ultrasonic Vibration CuttingSaood AliNoch keine Bewertungen
- Mechanism and Machine Theory: Chen Zhang, Yun SongDokument15 SeitenMechanism and Machine Theory: Chen Zhang, Yun SongSaood AliNoch keine Bewertungen
- On Design and Tribological Behaviour of Laser Textured SurfacesDokument7 SeitenOn Design and Tribological Behaviour of Laser Textured SurfacesSaood AliNoch keine Bewertungen
- Problems of Friction Force Measurement Between Cylindrical Outdoor and Internal Slide PartsDokument7 SeitenProblems of Friction Force Measurement Between Cylindrical Outdoor and Internal Slide PartsSaood AliNoch keine Bewertungen
- Design, Modeling, Sensing, Actuation and Control For Micro/Nano Scale Systems (DMSAC-MNSS)Dokument2 SeitenDesign, Modeling, Sensing, Actuation and Control For Micro/Nano Scale Systems (DMSAC-MNSS)Saood AliNoch keine Bewertungen
- Korean Language Institute Yeugnam University: Personal InformationDokument6 SeitenKorean Language Institute Yeugnam University: Personal InformationSaood AliNoch keine Bewertungen
- Inhibition Effect of Triazole Derivative On Corrosion of N80 Steel in HCL SolutionDokument1 SeiteInhibition Effect of Triazole Derivative On Corrosion of N80 Steel in HCL SolutionSaood AliNoch keine Bewertungen
- Guo 2013Dokument8 SeitenGuo 2013Saood AliNoch keine Bewertungen
- 3381 Crystic Handbook Dec 05Dokument100 Seiten3381 Crystic Handbook Dec 05Anton FatoniNoch keine Bewertungen
- PDFDokument3 SeitenPDFElla BhattacharyaNoch keine Bewertungen
- Biometrics IN Network SecurityDokument10 SeitenBiometrics IN Network SecurityARVINDNoch keine Bewertungen
- Iterative Learning ControlDokument64 SeitenIterative Learning ControlBingNoch keine Bewertungen
- Maslow's Hierarchy of NeedsDokument9 SeitenMaslow's Hierarchy of NeedsmevsmasterNoch keine Bewertungen
- Configuring NIS Services in LinuxDokument8 SeitenConfiguring NIS Services in Linuxapi-3736383100% (1)
- HRM BBA AssignmentsDokument2 SeitenHRM BBA AssignmentsNitin GargNoch keine Bewertungen
- Competing AdvantageDokument63 SeitenCompeting Advantagejeremyclarkson02020% (4)
- Itexamguide: High-Quality It Cert Exam Study GuideDokument7 SeitenItexamguide: High-Quality It Cert Exam Study GuideSaira KhanNoch keine Bewertungen
- Perraillon Marginal Effects Lecture Lisbon 0Dokument65 SeitenPerraillon Marginal Effects Lecture Lisbon 0Meseret ZerihunNoch keine Bewertungen
- B2+ UNIT 10 Test Answer Key HigherDokument2 SeitenB2+ UNIT 10 Test Answer Key HigherMOSQUITO beats100% (1)
- QuestionnaireDokument3 SeitenQuestionnaireUzma KhanamNoch keine Bewertungen
- Teaching Resume-2Dokument2 SeitenTeaching Resume-2api-490943277Noch keine Bewertungen
- Theories in NursingDokument22 SeitenTheories in NursingChrisgr8Noch keine Bewertungen
- Grade 6 Mathematics Week 12 Lesson 4 - 2021 - Term 2Dokument6 SeitenGrade 6 Mathematics Week 12 Lesson 4 - 2021 - Term 2MARK DEFREITASNoch keine Bewertungen
- Seminar FormatDokument6 SeitenSeminar Formatupasana joliaNoch keine Bewertungen
- SQADokument10 SeitenSQAElvin Joseph Pualengco MendozaNoch keine Bewertungen
- HRAD123 - 1 - Summative Sem A Brief 2023Dokument6 SeitenHRAD123 - 1 - Summative Sem A Brief 2023karabomoremane87Noch keine Bewertungen
- Lesson Plan in Story Time-C.o. 3Dokument9 SeitenLesson Plan in Story Time-C.o. 3Girlie May MabasagNoch keine Bewertungen
- Energy Factored by Time ArtDokument16 SeitenEnergy Factored by Time Artinnocentbystander100% (1)
- Organisational Culture and ChangeDokument49 SeitenOrganisational Culture and ChangeMahima Rojith100% (1)
- Art and Design - Course ProspectusDokument20 SeitenArt and Design - Course ProspectusNHCollegeNoch keine Bewertungen
- دور معايير التقارير المالية الدولية في الحد من ممارسات ادارة الارباح في القوائم المالية للمصارفDokument18 Seitenدور معايير التقارير المالية الدولية في الحد من ممارسات ادارة الارباح في القوائم المالية للمصارفWshiar Omer100% (1)
- Noun in English Grammar With Examples With PDFDokument9 SeitenNoun in English Grammar With Examples With PDFhemisphereph2981Noch keine Bewertungen
- Advanced Quality ControlDokument38 SeitenAdvanced Quality ControlSantosh VemulaNoch keine Bewertungen
- Decision TreeDokument3 SeitenDecision Tree64-Shashank SagarNoch keine Bewertungen
- Nei Nastran in Cad 2011 BrochureDokument8 SeitenNei Nastran in Cad 2011 Brochurexuanphuong2710Noch keine Bewertungen
- Darwin Geologist PDFDokument3 SeitenDarwin Geologist PDFKendallhernandez100% (1)
- Usa PDFDokument1 SeiteUsa PDFRemy CaperochoNoch keine Bewertungen
- Naïve Bayes ClassifierDokument17 SeitenNaïve Bayes ClassifierZohair AhmedNoch keine Bewertungen
- Đề Nghe 19.sepDokument5 SeitenĐề Nghe 19.sepThanh Binh Pham ThiNoch keine Bewertungen