Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- LO AD 2 LOWW 9-2-1 enDokument8 SeitenLO AD 2 LOWW 9-2-1 enjoseph.mangan1892Noch keine Bewertungen
- Function Mit18086Dokument3 SeitenFunction Mit18086Ria Dwi IzahyantiNoch keine Bewertungen
- MRTT 3Dokument4 SeitenMRTT 3Jeremy TohNoch keine Bewertungen
- Gtma News Issue 2 2012Dokument60 SeitenGtma News Issue 2 2012GTMAAdminNoch keine Bewertungen
- Soal Latihan A1,4 Aircraft AvionicDokument11 SeitenSoal Latihan A1,4 Aircraft AvionicReza BachdarNoch keine Bewertungen
- General Navigation Exam 3Dokument19 SeitenGeneral Navigation Exam 3momanbhNoch keine Bewertungen
- Aerospace Products Brochure-AlcoaDokument15 SeitenAerospace Products Brochure-Alcoasergiovega02Noch keine Bewertungen
- Energy Concepts QuestionsDokument3 SeitenEnergy Concepts QuestionsCArnoldPhysicsNoch keine Bewertungen
- Book 07Dokument358 SeitenBook 07Vitor M R Coelho100% (2)
- Ata 21 TrsonDokument160 SeitenAta 21 TrsonTam Ho100% (1)
- Display FlightInstrumentsDokument116 SeitenDisplay FlightInstrumentsDpt HtegnNoch keine Bewertungen
- One Mark QueDokument27 SeitenOne Mark QuenandhakumarmeNoch keine Bewertungen
- Aerodynamic Noise TurbomachinesDokument356 SeitenAerodynamic Noise TurbomachinesNicolas DuboisNoch keine Bewertungen
- MODEL 150 SERIES (1969 - 1976) : Supplemental Inspection Number: 55-11-02 1. TitleDokument3 SeitenMODEL 150 SERIES (1969 - 1976) : Supplemental Inspection Number: 55-11-02 1. TitleRebeca SerranoNoch keine Bewertungen
- Short and Useful Comparison Between US LSA and CS-LSADokument3 SeitenShort and Useful Comparison Between US LSA and CS-LSAinsultorNoch keine Bewertungen
- Hovercraft DesignDokument21 SeitenHovercraft DesignGlacier RamkissoonNoch keine Bewertungen
- Struct FastCatalogDokument12 SeitenStruct FastCatalogGabriel WilliamsonNoch keine Bewertungen
- Aircraft Sealants: Sealant Application Chart & Cross ReferenceDokument1 SeiteAircraft Sealants: Sealant Application Chart & Cross ReferenceYuda IswantoNoch keine Bewertungen
- Chap 4 Flight Controls 1Dokument8 SeitenChap 4 Flight Controls 1ismain.niniNoch keine Bewertungen
- Effective Length of Columns With Intermediate Axial LoadDokument3 SeitenEffective Length of Columns With Intermediate Axial LoaddolonbgdNoch keine Bewertungen
- Boarding PassDokument7 SeitenBoarding PassiggyhealeyNoch keine Bewertungen
- Tac79 02Dokument26 SeitenTac79 02TateNoch keine Bewertungen
- 1 - IntroductionDokument12 Seiten1 - IntroductionEr Harsh MahatoNoch keine Bewertungen
- Falcon 20 Business Jet Celebrating 60th Anniversary - Business Aviation News - Aviation International NewsDokument3 SeitenFalcon 20 Business Jet Celebrating 60th Anniversary - Business Aviation News - Aviation International NewstmuthukumarNoch keine Bewertungen
- Easa AdDokument3 SeitenEasa AdPalaash SaxenaNoch keine Bewertungen
- ECSS E HB 32 20 - Part6A Fracture and MaterialDokument428 SeitenECSS E HB 32 20 - Part6A Fracture and MaterialGuillermo MartínezNoch keine Bewertungen
- Rodale ALQ-167 CD BandDokument3 SeitenRodale ALQ-167 CD BandBlaze123xNoch keine Bewertungen
- English BiographyDokument189 SeitenEnglish BiographySachin D ThamkeNoch keine Bewertungen
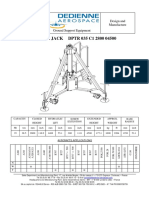
- DPTR035C1280004500Dokument2 SeitenDPTR035C1280004500gmailNoch keine Bewertungen