Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- ME6012 QBDokument7 SeitenME6012 QBbadree456Noch keine Bewertungen
- Fx-82sx 220plus Etc enDokument2 SeitenFx-82sx 220plus Etc enMegan Graciela IceMintzNoch keine Bewertungen
- DENOCDokument33 SeitenDENOCbadree456Noch keine Bewertungen
- CH 6 Dyamic Modeling (Robotics)Dokument21 SeitenCH 6 Dyamic Modeling (Robotics)badree456Noch keine Bewertungen
- Gate 2 PDFDokument20 SeitenGate 2 PDFPrathamesh NaikNoch keine Bewertungen
- Managerial CommunicationDokument17 SeitenManagerial Communicationbadree456Noch keine Bewertungen
- TOOLINGDokument33 SeitenTOOLINGbadree456Noch keine Bewertungen
- Academic Calendar:) For The Students Admitted Before The Academic Session 2015-16Dokument3 SeitenAcademic Calendar:) For The Students Admitted Before The Academic Session 2015-16badree456Noch keine Bewertungen
- Check List - 2015 With EditionDokument21 SeitenCheck List - 2015 With Editionbadree456Noch keine Bewertungen
- Solid Mechanics 94 10Dokument89 SeitenSolid Mechanics 94 10landatoNoch keine Bewertungen
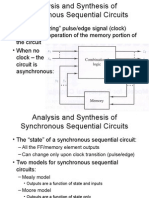
- A "Synchronizing" Pulse/edge Signal (Clock) Controls The Operation of The Memory Portion of The Circuit - When No Clock - The Circuit Is AsynchronousDokument16 SeitenA "Synchronizing" Pulse/edge Signal (Clock) Controls The Operation of The Memory Portion of The Circuit - When No Clock - The Circuit Is Asynchronousbadree456Noch keine Bewertungen
- Academic Calendar:) For The Students Admitted Before The Academic Session 2015-16Dokument3 SeitenAcademic Calendar:) For The Students Admitted Before The Academic Session 2015-16badree456Noch keine Bewertungen
- Ipu Mechatronics SyllabusDokument108 SeitenIpu Mechatronics Syllabusbadree456Noch keine Bewertungen
- Final Catalogue 2015 IpuDokument200 SeitenFinal Catalogue 2015 Ipubadree456Noch keine Bewertungen
- LibreOffice User GuideDokument390 SeitenLibreOffice User GuidepetronemicheleNoch keine Bewertungen
- English GRAMMARDokument47 SeitenEnglish GRAMMARthegopalNoch keine Bewertungen
- Ggsipu CatalogueDokument76 SeitenGgsipu Cataloguebadree456Noch keine Bewertungen
- Measuring InstrumentsDokument45 SeitenMeasuring InstrumentsRavinder Minhas100% (1)
- Summary of Basic C++-CommandsDokument6 SeitenSummary of Basic C++-CommandsEdgar GonzalezNoch keine Bewertungen
- Best Yoga and ExercDokument6 SeitenBest Yoga and Exercbadree456Noch keine Bewertungen
- Projection of LinesDokument44 SeitenProjection of Linesxblueknight100% (5)
- GCC Compilation Process Steps and Stages For C ProgramDokument5 SeitenGCC Compilation Process Steps and Stages For C Programbadree456Noch keine Bewertungen
- Skilledup Guide Succeeding at Online CoursesDokument13 SeitenSkilledup Guide Succeeding at Online Coursesbadree456Noch keine Bewertungen
- Projection of LinesDokument44 SeitenProjection of Linesxblueknight100% (5)
- OpticsDokument64 SeitenOpticskunal261188Noch keine Bewertungen
- Projection of PlanesDokument36 SeitenProjection of Planespradeep75% (4)
- HG Sourse Diffraction GratingDokument4 SeitenHG Sourse Diffraction Gratingbadree456Noch keine Bewertungen
- Physics Excellent QuestionsDokument98 SeitenPhysics Excellent QuestionsShashank Rai0% (1)
- H Physics XIIDokument33 SeitenH Physics XIIMuzammil AfsarNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Understanding and Explaining Surface Tension and CDokument12 SeitenUnderstanding and Explaining Surface Tension and CKatiaPeraltaNoch keine Bewertungen
- Zelio Control RM4UB35Dokument7 SeitenZelio Control RM4UB35Qin DieselNoch keine Bewertungen
- Lecture 17 Shaft Loading PDFDokument26 SeitenLecture 17 Shaft Loading PDFAndrew Tan100% (1)
- Quantum Dot Poster 4Dokument1 SeiteQuantum Dot Poster 4api-253695787Noch keine Bewertungen
- Hacon TMDokument68 SeitenHacon TMTiago CoutoNoch keine Bewertungen
- Aircraft Performance AnalysisDokument4 SeitenAircraft Performance AnalysisdanielNoch keine Bewertungen
- Helmholtz Free EnergyDokument6 SeitenHelmholtz Free EnergyDuà Zàhrä RìzvîNoch keine Bewertungen
- Report Viewer 0.4Dokument7 SeitenReport Viewer 0.4Yana YiNoch keine Bewertungen
- Subatomic ParticleDokument10 SeitenSubatomic ParticlemcmusbixNoch keine Bewertungen
- Transistor LaserDokument19 SeitenTransistor LaserUnn krishnan BNoch keine Bewertungen
- An Exploration of The Physics Behind Rail GunsDokument7 SeitenAn Exploration of The Physics Behind Rail GunsmegustalazorraNoch keine Bewertungen
- AcgntrDokument4 SeitenAcgntrshivNoch keine Bewertungen
- The SunDokument16 SeitenThe Sun3XTR3M3 ᜰ꙰ꦿ NJRNoch keine Bewertungen
- IB PHYSICS 2.1 Presentation All UnitDokument52 SeitenIB PHYSICS 2.1 Presentation All UnitJustCallMeLarryNoch keine Bewertungen
- Ajc H2 Math P1Dokument6 SeitenAjc H2 Math P1jimmytanlimlongNoch keine Bewertungen
- New Chs PDFDokument28 SeitenNew Chs PDFSTUDIESEXAMS ONLYYYNoch keine Bewertungen
- Lecture Notes PDFDokument46 SeitenLecture Notes PDFManex ManNoch keine Bewertungen
- Level 2 Ques (1) RTDokument34 SeitenLevel 2 Ques (1) RTVishal Sharma100% (1)
- IX NSTSE Level-1 Mock Test-2-5Dokument15 SeitenIX NSTSE Level-1 Mock Test-2-5puneet manglaNoch keine Bewertungen
- Corrosion Science: SciencedirectDokument10 SeitenCorrosion Science: SciencedirectThiago CordeiroNoch keine Bewertungen
- Electrostatics 11: Electric ChargeDokument69 SeitenElectrostatics 11: Electric ChargeManas kumarNoch keine Bewertungen
- Metal Powder Processing TechniquesDokument26 SeitenMetal Powder Processing TechniquesAzhar Ali0% (1)
- Laws of Photochemistry: Grothus-Draper LawDokument2 SeitenLaws of Photochemistry: Grothus-Draper Law786twinkle.786Noch keine Bewertungen
- Weber 2016Dokument6 SeitenWeber 2016charon lastNoch keine Bewertungen
- Gen-Chem-1 Handout Q1 Week2Dokument5 SeitenGen-Chem-1 Handout Q1 Week2Kirby MoralesNoch keine Bewertungen
- Electromagnetic Interference (EMI)Dokument17 SeitenElectromagnetic Interference (EMI)Anonymous eWMnRr70qNoch keine Bewertungen
- Arab Pavement Publication 10 5265 401Dokument61 SeitenArab Pavement Publication 10 5265 401HanafiahHamzahNoch keine Bewertungen
- Taller 3 AplicacionesDokument2 SeitenTaller 3 AplicacionesMaría Alejandra Zapata MendozaNoch keine Bewertungen
- Motor Stepper C6851-9012Dokument7 SeitenMotor Stepper C6851-9012jtxtbrNoch keine Bewertungen
- Class 8 Cbse Chemistry Sample Paper Term 1 Model 2Dokument2 SeitenClass 8 Cbse Chemistry Sample Paper Term 1 Model 2Sunaina RawatNoch keine Bewertungen