Das könnte Ihnen auch gefallen
- AndreasenJ Back To The FutureDokument6 SeitenAndreasenJ Back To The FutureQilong ZhangNoch keine Bewertungen
- Problem Set 3: More On The Ramsey Model: Problem 1 - Social Planner ProblemDokument11 SeitenProblem Set 3: More On The Ramsey Model: Problem 1 - Social Planner ProblemDaniel GNoch keine Bewertungen
- Cargo MateDokument284 SeitenCargo MateGeorge Masvoulas100% (3)
- TCR CCSS Checklist Grade 5 PDFDokument39 SeitenTCR CCSS Checklist Grade 5 PDFAnonymous amd4hzGNoch keine Bewertungen
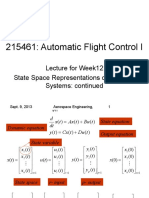
- Automatic Flight Control State Space ModelsDokument73 SeitenAutomatic Flight Control State Space ModelsNumkang KangNoch keine Bewertungen
- State Space Modeling FundamentalsDokument19 SeitenState Space Modeling Fundamentalsjiraya chiNoch keine Bewertungen
- Unit1 PDFDokument72 SeitenUnit1 PDFRiddhijit ChattopadhyayNoch keine Bewertungen
- Properties of The Laplace Transform: - ObjectivesDokument11 SeitenProperties of The Laplace Transform: - ObjectivesBala Samuvel JosephNoch keine Bewertungen
- Cal3 WS1 Space CurvesDokument6 SeitenCal3 WS1 Space Curves陳泓睿Noch keine Bewertungen
- Lesson 1 VC 1.09Dokument14 SeitenLesson 1 VC 1.09Sri RaghavanNoch keine Bewertungen
- CurvesDokument61 SeitenCurvesRajesh RockyNoch keine Bewertungen
- M2042 Ch3 Vector DiffDokument27 SeitenM2042 Ch3 Vector Difftedy yidegNoch keine Bewertungen
- ap微积分bc自由问答题2019(1)Dokument199 Seitenap微积分bc自由问答题2019(1)msy83635Noch keine Bewertungen
- Vector Valued FunctionDokument33 SeitenVector Valued FunctionFarhan naseenNoch keine Bewertungen
- 05 Diff GeoDokument58 Seiten05 Diff GeoAymen HssainiNoch keine Bewertungen
- Introduction To ROBOTICSDokument35 SeitenIntroduction To ROBOTICSVistor VondarthNoch keine Bewertungen
- Vector Calculus R16Dokument87 SeitenVector Calculus R16Meghna SahaNoch keine Bewertungen
- ENG 233 Lecture Notes 3Dokument5 SeitenENG 233 Lecture Notes 3David Mitry ThomasNoch keine Bewertungen
- MAT 241-Calculus 3 - Prof. Santilli Toughloves Chapter 13Dokument3 SeitenMAT 241-Calculus 3 - Prof. Santilli Toughloves Chapter 13Gerardo Mendoza RicaudNoch keine Bewertungen
- Solutions To Homework 7: MT e X e DXDokument5 SeitenSolutions To Homework 7: MT e X e DXPei JingNoch keine Bewertungen
- WWW - Studymaterialz.in: Signal and System Important 30 MCQ PDF With SolutionDokument71 SeitenWWW - Studymaterialz.in: Signal and System Important 30 MCQ PDF With SolutionYash Gopani100% (1)
- Math 312Dokument4 SeitenMath 312Sawsan AbiibNoch keine Bewertungen
- Dr Shikongo's I3611IM Lecture NotesDokument116 SeitenDr Shikongo's I3611IM Lecture NotesJonas XoxaeNoch keine Bewertungen
- Anthony Vaccaro MATH 264 Winter 2023 Assignment Assignment 6 Due 03/12/2023 at 11:59pm EDTDokument1 SeiteAnthony Vaccaro MATH 264 Winter 2023 Assignment Assignment 6 Due 03/12/2023 at 11:59pm EDTAnthony VaccaroNoch keine Bewertungen
- Model Order RedcnDokument10 SeitenModel Order RedcnVSNoch keine Bewertungen
- Lecture 25: Line IntegralsDokument5 SeitenLecture 25: Line Integralssmartwb.bihNoch keine Bewertungen
- Lecture 15Dokument7 SeitenLecture 15David NgoNoch keine Bewertungen
- sns_2021_기말(온라인)Dokument2 Seitensns_2021_기말(온라인)juyeons0204Noch keine Bewertungen
- Module4 Signals and Systems LTDokument9 SeitenModule4 Signals and Systems LTAkul PaiNoch keine Bewertungen
- Process Control 5Dokument21 SeitenProcess Control 5Mohamad AbdelkaderNoch keine Bewertungen
- Week 11 L1Dokument8 SeitenWeek 11 L1Venkat ReddiNoch keine Bewertungen
- Trajectory Optimization: Control vs. PlanningDokument10 SeitenTrajectory Optimization: Control vs. PlanningSean ShugarNoch keine Bewertungen
- Mathematics: The Extremal Solution To Conformable Fractional Differential Equations Involving Integral Boundary ConditionDokument9 SeitenMathematics: The Extremal Solution To Conformable Fractional Differential Equations Involving Integral Boundary ConditionHumairoh AnNoch keine Bewertungen
- Preface: Euler-Lagrange EquationDokument10 SeitenPreface: Euler-Lagrange Equationadambose1990Noch keine Bewertungen
- Jim X. Chen: Jchen @cs - Gmu.eduDokument21 SeitenJim X. Chen: Jchen @cs - Gmu.edukranthi142434Noch keine Bewertungen
- Thursday, November 10: Green's TheoremDokument5 SeitenThursday, November 10: Green's TheoremRutendo ChihotaNoch keine Bewertungen
- Signals and Systems HomeworkDokument3 SeitenSignals and Systems HomeworkVong TithtolaNoch keine Bewertungen
- Cambridge Books OnlineDokument8 SeitenCambridge Books OnlinegoserunnerNoch keine Bewertungen
- Chapter 13 Vector Integral Calculus: DiscussionsDokument13 SeitenChapter 13 Vector Integral Calculus: DiscussionsAhmed mohyNoch keine Bewertungen
- HW2Dokument16 SeitenHW2DARKII Q8Noch keine Bewertungen
- Chapter 13 Vector Integral Calculus: DiscussionsDokument47 SeitenChapter 13 Vector Integral Calculus: DiscussionsAhmed mohyNoch keine Bewertungen
- Lesson 8 VC.06 Day2Dokument16 SeitenLesson 8 VC.06 Day2Sri RaghavanNoch keine Bewertungen
- Yates' Chapter 6, 10: Stochastic Processes & Stochastic FilteringDokument16 SeitenYates' Chapter 6, 10: Stochastic Processes & Stochastic FilteringMohamed Ziad AlezzoNoch keine Bewertungen
- Generalized Coordinates and Lagrange's EquationsDokument27 SeitenGeneralized Coordinates and Lagrange's EquationsCristian TuctoNoch keine Bewertungen
- Section 13.2 Derivatives and Integrals of Vector FunctionsDokument3 SeitenSection 13.2 Derivatives and Integrals of Vector FunctionsAlvin AdityaNoch keine Bewertungen
- Space Curves 1Dokument12 SeitenSpace Curves 1John KimaniNoch keine Bewertungen
- Tutorial 6Dokument2 SeitenTutorial 6SigmaNoch keine Bewertungen
- So Far: 2.004 Fall '07Dokument13 SeitenSo Far: 2.004 Fall '07Lemdy AnwunaNoch keine Bewertungen
- 5vector FunctionDokument24 Seiten5vector FunctionNur HannaNoch keine Bewertungen
- 111 Worksheets For Calculus 1 4-3Dokument4 Seiten111 Worksheets For Calculus 1 4-3林皓群Noch keine Bewertungen
- Math 23 Lecture 3.7 Line Integral of Scalar FieldsDokument22 SeitenMath 23 Lecture 3.7 Line Integral of Scalar FieldsyeahNoch keine Bewertungen
- Ee235 Midterm Sol f05Dokument5 SeitenEe235 Midterm Sol f05Minh McdohlNoch keine Bewertungen
- 13.2 Line IntegralsDokument17 Seiten13.2 Line Integrals21142467Noch keine Bewertungen
- F1 FourDokument8 SeitenF1 FourTeddy MucaiNoch keine Bewertungen
- EnvelopeDokument8 SeitenEnvelopeMartin EgozcueNoch keine Bewertungen
- Tutorial Exercise - 5Dokument5 SeitenTutorial Exercise - 5BelaynewNoch keine Bewertungen
- STRPM1405 (4) 48034 5 18Dokument14 SeitenSTRPM1405 (4) 48034 5 18rashmi.sharma.rs.mat18Noch keine Bewertungen
- Param SummaryDokument5 SeitenParam Summarynajek81Noch keine Bewertungen
- Problem 2.10 (A) (B) (C)Dokument2 SeitenProblem 2.10 (A) (B) (C)ali ahmedNoch keine Bewertungen
- DR Tasos Avgoustidis: Lecture 5: Interacting FieldsDokument16 SeitenDR Tasos Avgoustidis: Lecture 5: Interacting Fieldscifarha venantNoch keine Bewertungen
- Lapalace Transform PDFDokument6 SeitenLapalace Transform PDFSameer KhanNoch keine Bewertungen
- Transmutation and Operator Differential EquationsVon EverandTransmutation and Operator Differential EquationsNoch keine Bewertungen
- Or QB Unit-1Dokument15 SeitenOr QB Unit-1api-343773957Noch keine Bewertungen
- FractalsDokument19 SeitenFractalsapi-343773957Noch keine Bewertungen
- Skilled WorkDokument13 SeitenSkilled Workapi-343773957Noch keine Bewertungen
- Noise and VibrationsDokument11 SeitenNoise and Vibrationsapi-343773957Noch keine Bewertungen
- CSG (Week 8)Dokument24 SeitenCSG (Week 8)DineshNewalkarNoch keine Bewertungen
- Intro To Eddy CurrentDokument57 SeitenIntro To Eddy Currentapi-343773957Noch keine Bewertungen
- Lecture 1Dokument29 SeitenLecture 1api-343773957Noch keine Bewertungen
- Intro To MagDokument37 SeitenIntro To Magapi-343773957Noch keine Bewertungen
- ErgonomicsDokument11 SeitenErgonomicsapi-343773957Noch keine Bewertungen
- Under Water WindmillDokument23 SeitenUnder Water Windmillapi-343773957100% (2)
- Introduction To 3D GraphicsDokument32 SeitenIntroduction To 3D Graphicsapi-343773957Noch keine Bewertungen
- Autonomous VehiclesDokument12 SeitenAutonomous Vehiclesapi-343773957Noch keine Bewertungen
- Six Stroke Engine PresenationDokument20 SeitenSix Stroke Engine Presenationapi-343773957Noch keine Bewertungen
- Psa MathsDokument11 SeitenPsa MathsUtsav SrivastavaNoch keine Bewertungen
- Radial Stockpile CalculationDokument1 SeiteRadial Stockpile CalculationSai KrishNoch keine Bewertungen
- Cuboid Volume and Surface Area InvestigationDokument2 SeitenCuboid Volume and Surface Area InvestigationOliver Gabaon GalimbaNoch keine Bewertungen
- Revision KitDokument156 SeitenRevision KitMuhammad Danish100% (1)
- IGCSE (9-1) Maths - Practice Paper 2FDokument22 SeitenIGCSE (9-1) Maths - Practice Paper 2FsaipkNoch keine Bewertungen
- Soal Latihan MTKDokument6 SeitenSoal Latihan MTKApex ApexNoch keine Bewertungen
- Material Modeling and Testing in PFCDokument67 SeitenMaterial Modeling and Testing in PFCDINNoch keine Bewertungen
- Maths CXC Mock Exam Question 13.05.15Dokument2 SeitenMaths CXC Mock Exam Question 13.05.15Shamar WalcottNoch keine Bewertungen
- 05 GCSE 1387 Paper 5 Nov 2003Dokument19 Seiten05 GCSE 1387 Paper 5 Nov 2003greatest6Noch keine Bewertungen
- EURAMET CG 21 V 2 1 2021Dokument37 SeitenEURAMET CG 21 V 2 1 2021Celal YILDIRIMNoch keine Bewertungen
- Pressure Vessel Design Excel Sheet Basic Designing Non Critical PDokument1 SeitePressure Vessel Design Excel Sheet Basic Designing Non Critical PKaramYassNoch keine Bewertungen
- fl20 Algebra2 Ipe 04Dokument80 Seitenfl20 Algebra2 Ipe 04Sayed MikoNoch keine Bewertungen
- Unsteady-State and Pseudosteady-State FlowDokument17 SeitenUnsteady-State and Pseudosteady-State FlowBintang SampurnaNoch keine Bewertungen
- Math9 Q2 Week1 - Variation 1Dokument26 SeitenMath9 Q2 Week1 - Variation 1Ryan Acosta100% (1)
- HS PreAlgebraDokument12 SeitenHS PreAlgebranixdorfjNoch keine Bewertungen
- G.C.E. (O.L) Model Paper (2020) - Zonal Education, GalleDokument12 SeitenG.C.E. (O.L) Model Paper (2020) - Zonal Education, GalleXiao Shadowlord0% (1)
- Diagnostic Math Test for Grade 6 StudentsDokument5 SeitenDiagnostic Math Test for Grade 6 StudentsLoradel Abapo67% (3)
- Investigation On Volume and Surface Area of CylinderDokument4 SeitenInvestigation On Volume and Surface Area of CylinderMuhammad Asad AliNoch keine Bewertungen
- Volume Calculations GuideDokument30 SeitenVolume Calculations GuideMohamad TayeaNoch keine Bewertungen
- Volume - SA - Math Grade 7Dokument4 SeitenVolume - SA - Math Grade 7OktavianaalfNoch keine Bewertungen
- 3E - Similar Triangle PacketDokument15 Seiten3E - Similar Triangle Packetfruity pebblesNoch keine Bewertungen
- Cbse 10 TH Maths Formulas Basic Algebraic IdentitiesDokument7 SeitenCbse 10 TH Maths Formulas Basic Algebraic Identities10B-10.BHUMIKA KOCHARNoch keine Bewertungen
- Analisis Bertopik Form 3 Chap 6 10 RDokument23 SeitenAnalisis Bertopik Form 3 Chap 6 10 RSean GomezNoch keine Bewertungen
- Shri Shankracharya Technical Campus-SSGI, Bhilai: Engineering Graphics & DesignDokument11 SeitenShri Shankracharya Technical Campus-SSGI, Bhilai: Engineering Graphics & Designnarendra dolasNoch keine Bewertungen
- Blockscad Scale CityDokument6 SeitenBlockscad Scale Cityapi-483537756Noch keine Bewertungen
- Manual WagnerDokument66 SeitenManual WagnerJames Sluper100% (1)
- IGCSE Physics CIE: 1.3 Mass, Weight & DensityDokument25 SeitenIGCSE Physics CIE: 1.3 Mass, Weight & Densityshiya.aayanNoch keine Bewertungen
- Multiple Choice QuestionsDokument18 SeitenMultiple Choice QuestionsDeepika DeepikaNoch keine Bewertungen