Das könnte Ihnen auch gefallen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument32 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- DK 011Dokument31 SeitenDK 011chandanNoch keine Bewertungen
- DK 011Dokument31 SeitenDK 011chandanNoch keine Bewertungen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument32 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument32 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument32 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument32 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument25 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- iPECS Unified SIP FeaturesDokument56 SeiteniPECS Unified SIP FeatureschandanNoch keine Bewertungen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument27 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument25 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument27 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument32 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument25 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- Smooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionDokument25 SeitenSmooth Evolution To 40G/100G: Aviat CTR 8000 & WTM 4000 Ems/Lct-Provision Aviat CTR 8000 & WTM 4000 Ems/Lct-ProvisionchandanNoch keine Bewertungen
- CA 740-V00R017C11-DescriptionDokument21 SeitenCA 740-V00R017C11-DescriptionchandanNoch keine Bewertungen
- AA 640-V00R0-DescriptionDokument22 SeitenAA 640-V00R0-DescriptionchandanNoch keine Bewertungen
- CA 700-V00R017C10-DescriptionDokument20 SeitenCA 700-V00R017C10-DescriptionchandanNoch keine Bewertungen
- CA 700-V00R017C10-DescriptionDokument20 SeitenCA 700-V00R017C10-DescriptionchandanNoch keine Bewertungen
- Digital Data Network DDNDokument12 SeitenDigital Data Network DDNchandanNoch keine Bewertungen
- iPECS Unified SIP FeaturesDokument56 SeiteniPECS Unified SIP FeatureschandanNoch keine Bewertungen
- CA 700-V00R017C10-DescriptionDokument20 SeitenCA 700-V00R017C10-DescriptionchandanNoch keine Bewertungen
- iPECS Unified SIP FeaturesDokument56 SeiteniPECS Unified SIP FeatureschandanNoch keine Bewertungen
- CT 850Dokument13 SeitenCT 850chandanNoch keine Bewertungen
- CT 850Dokument13 SeitenCT 850chandanNoch keine Bewertungen
- CT 850Dokument13 SeitenCT 850chandanNoch keine Bewertungen
- CT 850Dokument13 SeitenCT 850chandanNoch keine Bewertungen
- CT 850Dokument13 SeitenCT 850chandanNoch keine Bewertungen
- CT 850Dokument13 SeitenCT 850chandanNoch keine Bewertungen
- CT 850Dokument13 SeitenCT 850chandanNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- B1 UNIT 1 Life Skills Video Teacher's NotesDokument1 SeiteB1 UNIT 1 Life Skills Video Teacher's NotesXime OlariagaNoch keine Bewertungen
- The Law of CosinesDokument4 SeitenThe Law of Cosinesapi-213604106Noch keine Bewertungen
- MAS500 2011 Vår Masteroppgave Henrik Engedal Per Magne EgelidDokument130 SeitenMAS500 2011 Vår Masteroppgave Henrik Engedal Per Magne EgelidPoppy DanielsNoch keine Bewertungen
- Sepction - 3Dokument3 SeitenSepction - 3k koradiaNoch keine Bewertungen
- The Impact of Employees' Commitment Towards Food Safety at Ayana Resort, BaliDokument58 SeitenThe Impact of Employees' Commitment Towards Food Safety at Ayana Resort, Balirachelle agathaNoch keine Bewertungen
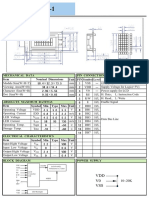
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemDokument1 SeiteV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriNoch keine Bewertungen
- Probability of Event Intersections: Vietnamese-German UniversityDokument17 SeitenProbability of Event Intersections: Vietnamese-German UniversityĐặng ThưNoch keine Bewertungen
- Inventory Counting in Inventory ManagementDokument15 SeitenInventory Counting in Inventory ManagementDinesh GuptaNoch keine Bewertungen
- Respons 910 Analyzer: Operator's ManualDokument246 SeitenRespons 910 Analyzer: Operator's ManualUmashankar LoganathanNoch keine Bewertungen
- TUYA ManualDokument2 SeitenTUYA ManualMagandang MallNoch keine Bewertungen
- Mars Climate Orbiter ReportDokument27 SeitenMars Climate Orbiter Reportbiguelo100% (1)
- Electrical Service Minimum RequirmentDokument97 SeitenElectrical Service Minimum RequirmentachniajosiNoch keine Bewertungen
- Excel Tips Tricks e-BookV1.1 PDFDokument20 SeitenExcel Tips Tricks e-BookV1.1 PDFSulabhNoch keine Bewertungen
- Best IIT JEE NEET and ICSE, CBSE, SSC Classes in Hadapsar PuneDokument18 SeitenBest IIT JEE NEET and ICSE, CBSE, SSC Classes in Hadapsar PuneTrinity AcademyNoch keine Bewertungen
- Philippine Ecd Checklist Class Summary (Post-Test) SY: 2022-2023Dokument5 SeitenPhilippine Ecd Checklist Class Summary (Post-Test) SY: 2022-2023UltravioletHeartNoch keine Bewertungen
- Problem Set 1Dokument2 SeitenProblem Set 1Lovedeep SinghNoch keine Bewertungen
- Philosophical Warfare and The Shadow of IdeasDokument5 SeitenPhilosophical Warfare and The Shadow of IdeasDavid MetcalfeNoch keine Bewertungen
- Artikel Jurnal Siti Tsuwaibatul ADokument11 SeitenArtikel Jurnal Siti Tsuwaibatul Aaslamiyah1024Noch keine Bewertungen
- DSO Digital Storage Oscilloscope: ApplicationDokument2 SeitenDSO Digital Storage Oscilloscope: ApplicationmsequipmentsNoch keine Bewertungen
- Uvm UnderstandingDokument8 SeitenUvm UnderstandingLokesh KumarNoch keine Bewertungen
- Access MISS ProxyDokument7 SeitenAccess MISS ProxyKorintus TedyNoch keine Bewertungen
- 2020-21 Series Test 1 QPDokument1 Seite2020-21 Series Test 1 QPred18ggmuNoch keine Bewertungen
- 2.talent Management New ChallengesDokument17 Seiten2.talent Management New ChallengesAlejandra AGNoch keine Bewertungen
- Alexander OsterwalderDokument2 SeitenAlexander Osterwalderamelia990% (1)
- Giáo Trình LabviewDokument54 SeitenGiáo Trình LabviewXuan Chiem0% (1)
- Action Research MethodDokument27 SeitenAction Research MethodNiño Czar RaroNoch keine Bewertungen
- Psyc 1100 Research ExperimentDokument10 SeitenPsyc 1100 Research Experimentapi-242343747Noch keine Bewertungen
- Certipur Certified Reference Material: Sodium Standard Solution 1000 MG/L NaDokument1 SeiteCertipur Certified Reference Material: Sodium Standard Solution 1000 MG/L NaJuan BenitezNoch keine Bewertungen
- Daily ReportDokument39 SeitenDaily ReportLe TuanNoch keine Bewertungen
- 2 Mathematics For Social Science-1-1Dokument58 Seiten2 Mathematics For Social Science-1-1ሀበሻ EntertainmentNoch keine Bewertungen