Das könnte Ihnen auch gefallen
- Virtual City Rubric: I. Specs (12 Points) 0 1 2 3Dokument3 SeitenVirtual City Rubric: I. Specs (12 Points) 0 1 2 3Pudeti RaghusreenivasNoch keine Bewertungen
- Due Date Telephone No Amount Payable: Summary of Charges Usage History (6 Months)Dokument3 SeitenDue Date Telephone No Amount Payable: Summary of Charges Usage History (6 Months)Pudeti RaghusreenivasNoch keine Bewertungen
- Andhra Pradesh Public Service Commission:: Vijayawada: Panchayat Secretary (Grade-Iv) - NOTIFICATION NO.13/2018Dokument6 SeitenAndhra Pradesh Public Service Commission:: Vijayawada: Panchayat Secretary (Grade-Iv) - NOTIFICATION NO.13/2018Pudeti RaghusreenivasNoch keine Bewertungen
- Bingo Housie Ticket Generator Excel SheetDokument9 SeitenBingo Housie Ticket Generator Excel Sheetyatsss21% (28)
- Final Answer Key VSDA - PostDokument1 SeiteFinal Answer Key VSDA - PostPudeti RaghusreenivasNoch keine Bewertungen
- Oscilador Booster Led Sony BD9397EFVDokument30 SeitenOscilador Booster Led Sony BD9397EFVAntonio Chavez100% (1)
- Grama/Ward Sachivalayam - Revised Examination Schedule: S.No Date Session Category PostsDokument1 SeiteGrama/Ward Sachivalayam - Revised Examination Schedule: S.No Date Session Category PostsBurra DayanandamNoch keine Bewertungen
- Notification Supervisory Post28082019Dokument13 SeitenNotification Supervisory Post28082019M S GilchristNoch keine Bewertungen
- Electrical Safety in Industries (Solid Propellant Rocket Motors Production Plant)Dokument1 SeiteElectrical Safety in Industries (Solid Propellant Rocket Motors Production Plant)Pudeti RaghusreenivasNoch keine Bewertungen
- VRO GII Clarification On The HigherQualification PDFDokument2 SeitenVRO GII Clarification On The HigherQualification PDFPudeti RaghusreenivasNoch keine Bewertungen
- Quantitative Aptitude Old Questions: WWW - Recruitment.guruDokument6 SeitenQuantitative Aptitude Old Questions: WWW - Recruitment.guruPudeti RaghusreenivasNoch keine Bewertungen
- Municipalities Organization ChartDokument1 SeiteMunicipalities Organization ChartPudeti RaghusreenivasNoch keine Bewertungen
- Bus TimingsDokument1 SeiteBus TimingsPudeti RaghusreenivasNoch keine Bewertungen
- Hindu Marriage Registration-User Manual For Online Citizen - Ver 1.0Dokument10 SeitenHindu Marriage Registration-User Manual For Online Citizen - Ver 1.0Pudeti RaghusreenivasNoch keine Bewertungen
- CRP RRB Viii Imp Notice PDFDokument1 SeiteCRP RRB Viii Imp Notice PDFPudeti RaghusreenivasNoch keine Bewertungen
- Paper - 2 Electrical EngineeringDokument24 SeitenPaper - 2 Electrical EngineeringPudeti RaghusreenivasNoch keine Bewertungen
- Square D Wiring Diagram BookDokument109 SeitenSquare D Wiring Diagram BookVieruth Pascua Paet100% (10)
- Revised Paper For AEE (Elect) With Ans-OneDokument24 SeitenRevised Paper For AEE (Elect) With Ans-OnevenkatNoch keine Bewertungen
- All PG DiplomaDokument11 SeitenAll PG DiplomaBipin DevNoch keine Bewertungen
- Notification Supervisory Post28082019Dokument13 SeitenNotification Supervisory Post28082019M S GilchristNoch keine Bewertungen
- DIS Project Proforma 2015 PDFDokument7 SeitenDIS Project Proforma 2015 PDFVidyesh Nair100% (2)
- 2005 16 Autumn Wiring Matters Earthing Your Questions AnsweredDokument7 Seiten2005 16 Autumn Wiring Matters Earthing Your Questions AnsweredAbhijeet KulkarniNoch keine Bewertungen
- Electrical Earthing (Grounding) Systems - A Technical Report and A Short CourseDokument4 SeitenElectrical Earthing (Grounding) Systems - A Technical Report and A Short CoursePudeti RaghusreenivasNoch keine Bewertungen
- Diploma in Industrial Safety Question PaperDokument1 SeiteDiploma in Industrial Safety Question PaperPudeti RaghusreenivasNoch keine Bewertungen
- Isolation Transformer Downstream of A UPS Causes Catastrophic DamageDokument15 SeitenIsolation Transformer Downstream of A UPS Causes Catastrophic DamagePudeti RaghusreenivasNoch keine Bewertungen
- 7750Dokument1 Seite7750Pudeti RaghusreenivasNoch keine Bewertungen
- Job Mela Company ListDokument17 SeitenJob Mela Company ListPudeti RaghusreenivasNoch keine Bewertungen
- Diploma in Industrial Safety Question PaperDokument1 SeiteDiploma in Industrial Safety Question PaperPudeti RaghusreenivasNoch keine Bewertungen
- FrigateTX 1 3K ManualDokument19 SeitenFrigateTX 1 3K ManualPudeti RaghusreenivasNoch keine Bewertungen
- PLC Basic FolioDokument7 SeitenPLC Basic FolioPudeti RaghusreenivasNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- ADMT Guide: Migrating and Restructuring Active Directory DomainsDokument263 SeitenADMT Guide: Migrating and Restructuring Active Directory DomainshtoomaweNoch keine Bewertungen
- ProjectDokument22 SeitenProjectSayan MondalNoch keine Bewertungen
- ARTS10 Q2 ModuleDokument12 SeitenARTS10 Q2 ModuleDen Mark GacumaNoch keine Bewertungen
- Nuttall Gear CatalogDokument275 SeitenNuttall Gear Catalogjose huertasNoch keine Bewertungen
- Poka-Yoke or Mistake Proofing: Historical Evolution.Dokument5 SeitenPoka-Yoke or Mistake Proofing: Historical Evolution.Harris ChackoNoch keine Bewertungen
- Operator'S Manual PM20X-X-X-BXX: 2" Diaphragm PumpDokument12 SeitenOperator'S Manual PM20X-X-X-BXX: 2" Diaphragm PumpOmar TadeoNoch keine Bewertungen
- Philpost RRDokument6 SeitenPhilpost RRGene AbotNoch keine Bewertungen
- New Text DocumentDokument13 SeitenNew Text DocumentJitendra Karn RajputNoch keine Bewertungen
- Project On Mahindra BoleroDokument35 SeitenProject On Mahindra BoleroViPul75% (8)
- King Saud UniversityDokument10 SeitenKing Saud UniversitypganoelNoch keine Bewertungen
- MSDS Formic AcidDokument3 SeitenMSDS Formic AcidChirag DobariyaNoch keine Bewertungen
- State Farm Claims: PO Box 52250 Phoenix AZ 85072-2250Dokument2 SeitenState Farm Claims: PO Box 52250 Phoenix AZ 85072-2250georgia ann polley-yatesNoch keine Bewertungen
- Lesson 23 Career PathwaysDokument34 SeitenLesson 23 Career PathwaysAlfredo ModestoNoch keine Bewertungen
- Newcastle University Dissertation FormatDokument6 SeitenNewcastle University Dissertation FormatWriteMyEnglishPaperForMeSterlingHeights100% (1)
- Frequently Asked Questions: Lecture 7 To 9 Hydraulic PumpsDokument5 SeitenFrequently Asked Questions: Lecture 7 To 9 Hydraulic PumpsJatadhara GSNoch keine Bewertungen
- Phenomenology of The SelfDokument5 SeitenPhenomenology of The SelfGuilherme CastelucciNoch keine Bewertungen
- Technology 6 B Matrixed Approach ToDokument12 SeitenTechnology 6 B Matrixed Approach ToNevin SunnyNoch keine Bewertungen
- 5 - Perception and Individual Decision Making in Organizational BehaviorDokument25 Seiten5 - Perception and Individual Decision Making in Organizational BehaviorJanaVrsalovićNoch keine Bewertungen
- LET-English-Structure of English-ExamDokument57 SeitenLET-English-Structure of English-ExamMarian Paz E Callo80% (5)
- Studies - Number and Algebra P1Dokument45 SeitenStudies - Number and Algebra P1nathan.kimNoch keine Bewertungen
- Chapter 2Dokument69 SeitenChapter 2Lizi CasperNoch keine Bewertungen
- Rate If Iodine and PropanoneDokument3 SeitenRate If Iodine and Propanoneshareef1Noch keine Bewertungen
- Influence of Freezing and Pasteurization of The Physical Condition of The Plastik (PE, PP and HDPE) As Selar Fish Packaging (Selaroides Leptolepis) in Sendang Biru, Malang, East Java. IndonesiaDokument7 SeitenInfluence of Freezing and Pasteurization of The Physical Condition of The Plastik (PE, PP and HDPE) As Selar Fish Packaging (Selaroides Leptolepis) in Sendang Biru, Malang, East Java. IndonesiaInternational Network For Natural SciencesNoch keine Bewertungen
- Chapter S1 (Celestial Timekeeping and Navigation)Dokument28 SeitenChapter S1 (Celestial Timekeeping and Navigation)Марко Д. Станковић0% (1)
- Issue15 - Chirag JiyaniDokument6 SeitenIssue15 - Chirag JiyaniDipankar SâháNoch keine Bewertungen
- Chemistry II EM Basic Learning MaterialDokument40 SeitenChemistry II EM Basic Learning MaterialMAHINDRA BALLANoch keine Bewertungen
- Motion To Dismiss Guidry Trademark Infringement ClaimDokument23 SeitenMotion To Dismiss Guidry Trademark Infringement ClaimDaniel BallardNoch keine Bewertungen
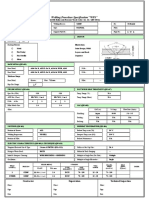
- Wps For Carbon Steel THK 7.11 GtawDokument1 SeiteWps For Carbon Steel THK 7.11 GtawAli MoosaviNoch keine Bewertungen
- Sheet (8) Synchronous Machine Problem (1) :: SolutionDokument5 SeitenSheet (8) Synchronous Machine Problem (1) :: Solutionمكاريوس عيادNoch keine Bewertungen
- Adding and Subtracting FractionsDokument4 SeitenAdding and Subtracting Fractionsapi-508898016Noch keine Bewertungen