Das könnte Ihnen auch gefallen
- Short Time Fourier TransformDokument39 SeitenShort Time Fourier Transformpratik shindeNoch keine Bewertungen
- Short Time Fourier Transform (STFT) : CS474/674 - Prof. BebisDokument36 SeitenShort Time Fourier Transform (STFT) : CS474/674 - Prof. BebisjohnNoch keine Bewertungen
- Short Time Fourier TransformDokument37 SeitenShort Time Fourier TransformHamada AlmasalmaNoch keine Bewertungen
- Short Time Fourier TransformDokument37 SeitenShort Time Fourier TransformGopikaPrasadNoch keine Bewertungen
- Short Time Fourier TransformDokument39 SeitenShort Time Fourier TransformKishore MylavarapuNoch keine Bewertungen
- Unit 5Dokument78 SeitenUnit 5Pavithra SivanathanNoch keine Bewertungen
- Advanced signal processing techniquesDokument62 SeitenAdvanced signal processing techniqueskalajamunNoch keine Bewertungen
- Dr. Varun Bajaj's Guide to Signal TransformsDokument25 SeitenDr. Varun Bajaj's Guide to Signal TransformsHEET GUPTANoch keine Bewertungen
- Chap 5 - Time Frequency WaveletDokument62 SeitenChap 5 - Time Frequency WaveletPriya SingNoch keine Bewertungen
- Lec 6 Fourier Series and Fourier TransfoDokument23 SeitenLec 6 Fourier Series and Fourier TransfoFatima EmanNoch keine Bewertungen
- Wavelet TransformDokument76 SeitenWavelet TransformWarrior BroNoch keine Bewertungen
- Lecture 2Dokument33 SeitenLecture 2marcelineparadzaiNoch keine Bewertungen
- Understanding Fourier Transforms using MatlabDokument19 SeitenUnderstanding Fourier Transforms using MatlabBasim Brohi100% (1)
- Fourier Transform and SpectraDokument14 SeitenFourier Transform and SpectraMd.Arifur RahmanNoch keine Bewertungen
- ELEC9344: STFT Analysis of Speech AudioDokument81 SeitenELEC9344: STFT Analysis of Speech AudioNeetu MarwahNoch keine Bewertungen
- The Continuous Wavelet Transform and Variable Resolution Time-Frequency AnalysisDokument8 SeitenThe Continuous Wavelet Transform and Variable Resolution Time-Frequency AnalysisDeepak kumarNoch keine Bewertungen
- WaveletsDokument30 SeitenWaveletsKshitij RachchhNoch keine Bewertungen
- Signal ProcessingDokument21 SeitenSignal ProcessingLiam NellNoch keine Bewertungen
- WaveletsDokument81 SeitenWaveletssaran52_eceNoch keine Bewertungen
- Signals and Systems: DT e T X F XDokument6 SeitenSignals and Systems: DT e T X F XBasim BrohiNoch keine Bewertungen
- GaborDokument25 SeitenGaborLita NovitasariNoch keine Bewertungen
- Stockwell-Why Use The S-TransformDokument31 SeitenStockwell-Why Use The S-Transformyankees131313Noch keine Bewertungen
- Signal ProcessingDokument40 SeitenSignal ProcessingSamson MumbaNoch keine Bewertungen
- Spectral Lab: FFT, DFT, PSDDokument14 SeitenSpectral Lab: FFT, DFT, PSDindameantimeNoch keine Bewertungen
- BEKC 2433 Chapter 4 - Fourier TransformsDokument49 SeitenBEKC 2433 Chapter 4 - Fourier TransformsAdam SaufiNoch keine Bewertungen
- Lecture 3Dokument42 SeitenLecture 3Zamshed FormanNoch keine Bewertungen
- EE1/EIE1: Introduction To Signals and Communications MATLAB ExperimentsDokument9 SeitenEE1/EIE1: Introduction To Signals and Communications MATLAB ExperimentsHemanth pNoch keine Bewertungen
- 2.continuous Wavelet TechniquesDokument14 Seiten2.continuous Wavelet TechniquesremaravindraNoch keine Bewertungen
- Ai DP 02 FS FT2023Dokument48 SeitenAi DP 02 FS FT2023Adika StadevantNoch keine Bewertungen
- L2: Signals & Spectra: Motivation For Frequency DomainDokument24 SeitenL2: Signals & Spectra: Motivation For Frequency DomainHunter VerneNoch keine Bewertungen
- Wavelet Transform AnalysisDokument14 SeitenWavelet Transform AnalysisMadeline CurryNoch keine Bewertungen
- 02 Fourier Theory and Communication SignalsDokument39 Seiten02 Fourier Theory and Communication Signals張思思Noch keine Bewertungen
- Fourier Transform Properties and ExamplesDokument14 SeitenFourier Transform Properties and ExamplesmfchinNoch keine Bewertungen
- Development of A Novel Voice Verification System Using WaveletsDokument22 SeitenDevelopment of A Novel Voice Verification System Using WaveletsBabu ShaikNoch keine Bewertungen
- A Short Note On Wavelet TransformDokument3 SeitenA Short Note On Wavelet Transformapi-268560834100% (2)
- Fourier transform in 1D and 2DDokument110 SeitenFourier transform in 1D and 2DMaram ShbairNoch keine Bewertungen
- Fourier TransformDokument77 SeitenFourier Transformtextile.km98Noch keine Bewertungen
- Sistel - 02 - FourierDokument31 SeitenSistel - 02 - FourierRivaldi MhsNoch keine Bewertungen
- L15-23 NotesDokument2 SeitenL15-23 NotesitasneemNoch keine Bewertungen
- FFT Fast Fourier TransformDokument9 SeitenFFT Fast Fourier Transformgurrune1Noch keine Bewertungen
- Chapter2 Lect3Dokument14 SeitenChapter2 Lect3Olga Joy Labajo GerastaNoch keine Bewertungen
- Amplitude Modulated Fourier Series: F (T) (O, T) F (T) F (T) NW B, BI NW (O, T) F (T)Dokument7 SeitenAmplitude Modulated Fourier Series: F (T) (O, T) F (T) F (T) NW B, BI NW (O, T) F (T)Ahmad Raees QayyumNoch keine Bewertungen
- Chapter2 Lect3Dokument14 SeitenChapter2 Lect3nctgayarangaNoch keine Bewertungen
- Spectral Analysis Key Points in A Power PointDokument75 SeitenSpectral Analysis Key Points in A Power PointKrishnaja KodaliNoch keine Bewertungen
- Frequency Domain Characterisation of SignalsDokument49 SeitenFrequency Domain Characterisation of SignalsshamnaskaNoch keine Bewertungen
- Fourier Analysis Lecture on Continuous SignalsDokument16 SeitenFourier Analysis Lecture on Continuous SignalsZamshed FormanNoch keine Bewertungen
- Installing VirtualBox CadenceDokument116 SeitenInstalling VirtualBox CadenceSri VidyaNoch keine Bewertungen
- Marple AnalyticDokument4 SeitenMarple AnalyticsssskkkkllllNoch keine Bewertungen
- Introduction To Wavelet A Tutorial - QiaoDokument49 SeitenIntroduction To Wavelet A Tutorial - QiaoPriyanka PoshalaNoch keine Bewertungen
- Wavelets TransformationDokument33 SeitenWavelets TransformationRajesh KbNoch keine Bewertungen
- Introduction To WaveletDokument26 SeitenIntroduction To WaveletNarasimhan KumaraveluNoch keine Bewertungen
- Chapter 7Dokument8 SeitenChapter 7Aldon JimenezNoch keine Bewertungen
- OFDM ReportDokument45 SeitenOFDM ReportNagarajan MalmuruganNoch keine Bewertungen
- Ch2-ASamplingFeb2020 (Compatibility Mode) PDFDokument40 SeitenCh2-ASamplingFeb2020 (Compatibility Mode) PDFKiên LýNoch keine Bewertungen
- Single Channel Phase-Aware Signal Processing in Speech Communication: Theory and PracticeVon EverandSingle Channel Phase-Aware Signal Processing in Speech Communication: Theory and PracticeNoch keine Bewertungen
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Von EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Noch keine Bewertungen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- AsicDokument8 SeitenAsicShivanshu Trivedi100% (1)
- VLSI System DesignDokument6 SeitenVLSI System DesignbigfatdashNoch keine Bewertungen
- Press Release: क�द्र�य कायार्लय, एस.बी.एस.मागर्, मुंबई /Phone: /Fax: emailDokument2 SeitenPress Release: क�द्र�य कायार्लय, एस.बी.एस.मागर्, मुंबई /Phone: /Fax: emailShivanshu TrivediNoch keine Bewertungen
- VLSI Hand Written Theory Class Notes of ACE PDFDokument178 SeitenVLSI Hand Written Theory Class Notes of ACE PDFRahul SrivastavaNoch keine Bewertungen
- Rec1 8177 Fresher ApplicationFormDokument2 SeitenRec1 8177 Fresher ApplicationFormLynman KyrogNoch keine Bewertungen
- Some Useful Linux CommandsDokument31 SeitenSome Useful Linux CommandsShivanshu TrivediNoch keine Bewertungen
- Some Useful Linux CommandsDokument31 SeitenSome Useful Linux CommandsShivanshu TrivediNoch keine Bewertungen
- Filter DesignDokument42 SeitenFilter DesignShivanshu Trivedi100% (1)
- NUMERICAL METHODS (Gate2016.info) PDFDokument60 SeitenNUMERICAL METHODS (Gate2016.info) PDFShivanshu TrivediNoch keine Bewertungen
- Intro To Other Important Aspects of DSPDokument44 SeitenIntro To Other Important Aspects of DSPShivanshu TrivediNoch keine Bewertungen
- Static Timing AnalysisDokument71 SeitenStatic Timing Analysisapi-3762689100% (13)
- Home Assignment-10: Electromagnetic Theory (EE340)Dokument1 SeiteHome Assignment-10: Electromagnetic Theory (EE340)shivanshu100% (1)
- Intro To Other Important Aspects of DSPDokument44 SeitenIntro To Other Important Aspects of DSPShivanshu TrivediNoch keine Bewertungen
- Multirate SystemsDokument9 SeitenMultirate SystemsShivanshu TrivediNoch keine Bewertungen
- GKP List Psu PDFDokument2 SeitenGKP List Psu PDFShivanshu TrivediNoch keine Bewertungen
- Lec - 2 Power ElectronicsDokument55 SeitenLec - 2 Power ElectronicsShivanshu TrivediNoch keine Bewertungen
- NETWORK THEORY Hand Written Theory Notes of ACE PDFDokument336 SeitenNETWORK THEORY Hand Written Theory Notes of ACE PDFShivanshu TrivediNoch keine Bewertungen
- Signals FFTDokument66 SeitenSignals FFTAbhishek VermaNoch keine Bewertungen
- IIITA - Fee Schedule & Structure For Jul-Dec-16 PDFDokument4 SeitenIIITA - Fee Schedule & Structure For Jul-Dec-16 PDFShivanshu TrivediNoch keine Bewertungen
- DSP Lab 4Dokument3 SeitenDSP Lab 4Shivanshu TrivediNoch keine Bewertungen
- Lec - 1 DICDDokument27 SeitenLec - 1 DICDShivanshu TrivediNoch keine Bewertungen
- AdcsfDokument28 SeitenAdcsfShivanshu TrivediNoch keine Bewertungen
- Walmart Registered StudentsDokument2 SeitenWalmart Registered StudentsShivanshu TrivediNoch keine Bewertungen
- Lec - 1 DICDDokument27 SeitenLec - 1 DICDShivanshu TrivediNoch keine Bewertungen
- Power Electronics: Faculty-In-Charge: Dr. Sitangshu BhattacharyaDokument27 SeitenPower Electronics: Faculty-In-Charge: Dr. Sitangshu BhattacharyaShivanshu TrivediNoch keine Bewertungen
- Edsp632 DSP Intro l1Dokument33 SeitenEdsp632 DSP Intro l1Shivanshu TrivediNoch keine Bewertungen
- Assignment 3Dokument3 SeitenAssignment 3Shivanshu TrivediNoch keine Bewertungen
- Consumer and Producer SurplusDokument39 SeitenConsumer and Producer SurplusShivanshu TrivediNoch keine Bewertungen
- HDokument32 SeitenHShivanshu TrivediNoch keine Bewertungen
- FFT Algorithms PDFDokument37 SeitenFFT Algorithms PDFIqbal NovramadaniNoch keine Bewertungen
- American Mathematical Society Lectures on Matrices by J.H.M. WedderburnDokument212 SeitenAmerican Mathematical Society Lectures on Matrices by J.H.M. WedderburnSamaraPimentelNoch keine Bewertungen
- Cook Toom AlgorithmDokument27 SeitenCook Toom AlgorithmThamaraiselvanNoch keine Bewertungen
- Engineering Optimization: Theory and Practice Third EditionDokument27 SeitenEngineering Optimization: Theory and Practice Third EditionMohit Natu100% (1)
- Form T2 Lesson Plan for Grade 8 MathDokument34 SeitenForm T2 Lesson Plan for Grade 8 MathLyra Mae Cambarijan GarmaNoch keine Bewertungen
- HTI Math Exam QuestionsDokument5 SeitenHTI Math Exam QuestionsKhalifa MohamedNoch keine Bewertungen
- A Construction of The Real NumbersDokument35 SeitenA Construction of The Real NumbersOscar PadillaNoch keine Bewertungen
- VAKEV Advanced Mathematics S6 SBDokument540 SeitenVAKEV Advanced Mathematics S6 SBvigiraneza0Noch keine Bewertungen
- Module 1 Definition of Laplace TransformDokument11 SeitenModule 1 Definition of Laplace TransformAC PAMANoch keine Bewertungen
- Properties of addition and their examplesDokument27 SeitenProperties of addition and their examplesShalini BhatnagarNoch keine Bewertungen
- Programme - MCA Course Name - Discrete Mathematics Course Code - MCA104 (Semester - 1)Dokument5 SeitenProgramme - MCA Course Name - Discrete Mathematics Course Code - MCA104 (Semester - 1)BWUMCA21078 SOUVIK SARKARNoch keine Bewertungen
- L1 Examples - Introduction To First Order Differential EquationsDokument6 SeitenL1 Examples - Introduction To First Order Differential EquationsCarlo EdolmoNoch keine Bewertungen
- Introductory Mathematics & StatisticsDokument26 SeitenIntroductory Mathematics & Statisticsjayson platino100% (1)
- Floyd-Warshall Algorithm Explained in 40 CharactersDokument6 SeitenFloyd-Warshall Algorithm Explained in 40 CharactersciaoasdasdNoch keine Bewertungen
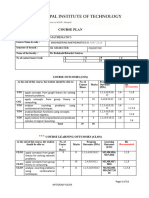
- Cce-Course Plan 2023Dokument11 SeitenCce-Course Plan 2023Alok KumarNoch keine Bewertungen
- Sample-Ch1 SecureDokument68 SeitenSample-Ch1 SecureSGillespieNoch keine Bewertungen
- Data Science With Python: NumpyDokument5 SeitenData Science With Python: NumpyRitesh NegiNoch keine Bewertungen
- I. Multiple Choice Direction: Read Carefully Each Item and Choose The Letter Corresponding To The Correct AnswerDokument6 SeitenI. Multiple Choice Direction: Read Carefully Each Item and Choose The Letter Corresponding To The Correct AnswerKiesha AltheaNoch keine Bewertungen
- Nat Reviewer Set B - Math 10Dokument2 SeitenNat Reviewer Set B - Math 10Jo Mai Hann90% (10)
- Specialist Maths 1 2014 - Solutions Final - 24marDokument19 SeitenSpecialist Maths 1 2014 - Solutions Final - 24marSophia DuongNoch keine Bewertungen
- MA1002 Calculus Integral Calculus: Department of Mathematical SciencesDokument76 SeitenMA1002 Calculus Integral Calculus: Department of Mathematical SciencessuaybNoch keine Bewertungen
- Hankel TransformDokument30 SeitenHankel TransformMuhammad KamranNoch keine Bewertungen
- Final Module 4 The Language of SetsDokument12 SeitenFinal Module 4 The Language of SetsLuccine ShinNoch keine Bewertungen
- Homomorphic Filtering and Speech Processing Using Cepstrum AnalysisDokument22 SeitenHomomorphic Filtering and Speech Processing Using Cepstrum Analysissaurabh8435100% (2)
- CK12 CalculusDokument457 SeitenCK12 CalculussamrandaNoch keine Bewertungen
- Operations on Functions: Compositions & CalculationsDokument1 SeiteOperations on Functions: Compositions & CalculationsPaulina TorresNoch keine Bewertungen
- Ss 2Dokument5 SeitenSs 2Raja AbdullahNoch keine Bewertungen
- Big M Method Examples LPP OptimizationDokument12 SeitenBig M Method Examples LPP OptimizationEshan MaheshwariNoch keine Bewertungen
- Paper 64 (Marya)Dokument20 SeitenPaper 64 (Marya)Muhammad SamraizNoch keine Bewertungen
- Math: Grade 2, Semester 1: Modeling With Functions: Polynomial and Absolute Value FunctionsDokument7 SeitenMath: Grade 2, Semester 1: Modeling With Functions: Polynomial and Absolute Value FunctionsAhmed AlyNoch keine Bewertungen