Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Decision Making, Engineering ManagementDokument27 SeitenDecision Making, Engineering Managementnep50% (4)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Qualification Standard for Instrumentation and Control PersonnelDokument273 SeitenQualification Standard for Instrumentation and Control PersonnelHumberto Enrique Oyaga Barrios100% (4)
- Methods For Calculating IlluminationDokument27 SeitenMethods For Calculating Illuminationreca4520100% (1)
- The History of Electronics PioneersDokument32 SeitenThe History of Electronics PioneersbigbangNoch keine Bewertungen
- The History of Electronics PioneersDokument32 SeitenThe History of Electronics PioneersbigbangNoch keine Bewertungen
- Turtle Diagram (Calibration)Dokument1 SeiteTurtle Diagram (Calibration)DL100% (1)
- 7 Famous Female Engineers in HistoryDokument6 Seiten7 Famous Female Engineers in HistorybigbangNoch keine Bewertungen
- 7 Famous Female Engineers in HistoryDokument6 Seiten7 Famous Female Engineers in HistorybigbangNoch keine Bewertungen
- Previews IES RP-6-01 PreDokument10 SeitenPreviews IES RP-6-01 Prebigbang0% (1)
- Philippine Electrical Code Guide to Electrical Safety StandardsDokument124 SeitenPhilippine Electrical Code Guide to Electrical Safety StandardsbigbangNoch keine Bewertungen
- Enterprise Resource Planning (ERP) - SEM-IV (GTU)Dokument139 SeitenEnterprise Resource Planning (ERP) - SEM-IV (GTU)keyur100% (1)
- Manual Testing Table of ContentsDokument33 SeitenManual Testing Table of ContentsAnto Ramee100% (1)
- Route 23 Connect Preliminary Feasibility Study - Executive SummaryDokument10 SeitenRoute 23 Connect Preliminary Feasibility Study - Executive SummaryWSYX/WTTENoch keine Bewertungen
- Lecture 9 - Project Planning and SchedulingDokument27 SeitenLecture 9 - Project Planning and SchedulingLouise Luy100% (3)
- Hazardous Waste ManagementDokument12 SeitenHazardous Waste ManagementbigbangNoch keine Bewertungen
- RMTechU Laboratory Borrower's SlipDokument2 SeitenRMTechU Laboratory Borrower's Slipbigbang60% (5)
- 7 Famous Female Engineers in HistoryDokument10 Seiten7 Famous Female Engineers in HistorybigbangNoch keine Bewertungen
- Board of Electrical Engineering-Code of EthicDokument2 SeitenBoard of Electrical Engineering-Code of Ethicraul_bsuNoch keine Bewertungen
- LinearTubular Fluourescent LampsDokument39 SeitenLinearTubular Fluourescent LampsbigbangNoch keine Bewertungen
- Measuring and Controlling TemperatureDokument21 SeitenMeasuring and Controlling TemperaturebigbangNoch keine Bewertungen
- Recommended Illuminance For MallsDokument1 SeiteRecommended Illuminance For MallsbigbangNoch keine Bewertungen
- Multidirectional GroundDokument3 SeitenMultidirectional GroundbigbangNoch keine Bewertungen
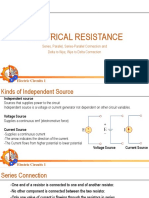
- Electrical Resistance Lecture 2Dokument5 SeitenElectrical Resistance Lecture 2bigbang0% (1)
- Nervous System of AnimalsDokument10 SeitenNervous System of AnimalsbigbangNoch keine Bewertungen
- Instrumentation and Control: Pressure MeasurementDokument23 SeitenInstrumentation and Control: Pressure MeasurementbigbangNoch keine Bewertungen
- Introduction To Environmental EngineeringDokument38 SeitenIntroduction To Environmental EngineeringbigbangNoch keine Bewertungen
- ELECTRICAL CIRCUITS: SERIES, PARALLEL, AND DELTA-WYE TRANSFORMATIONSDokument16 SeitenELECTRICAL CIRCUITS: SERIES, PARALLEL, AND DELTA-WYE TRANSFORMATIONSbigbangNoch keine Bewertungen
- ElecromagsDokument1 SeiteElecromagsbigbangNoch keine Bewertungen
- Chapter - 1Dokument19 SeitenChapter - 1api-314267144Noch keine Bewertungen
- WS Circuits 3Dokument2 SeitenWS Circuits 3bigbangNoch keine Bewertungen
- Mechatronics: Basic Automation and PLCDokument29 SeitenMechatronics: Basic Automation and PLCbigbangNoch keine Bewertungen
- Engineering Management Ch1Dokument21 SeitenEngineering Management Ch1bigbangNoch keine Bewertungen
- Electrical Safety and Strategic SolutionsDokument63 SeitenElectrical Safety and Strategic SolutionsboltgingerkoppyNoch keine Bewertungen
- Environmental and Health Problems in LivestockDokument8 SeitenEnvironmental and Health Problems in LivestockbigbangNoch keine Bewertungen
- Format For The Report DocuDokument5 SeitenFormat For The Report DocubigbangNoch keine Bewertungen
- UI Design & OOAD PrinciplesDokument2 SeitenUI Design & OOAD PrinciplesDeepanarendraNoch keine Bewertungen
- Outline: Software Engineering For Software-Intensive Systems: IV RequirementsDokument11 SeitenOutline: Software Engineering For Software-Intensive Systems: IV Requirementsvar6212Noch keine Bewertungen
- Detection of Employee Stress Using Machine LearningDokument14 SeitenDetection of Employee Stress Using Machine LearningD.Naresh BabuNoch keine Bewertungen
- Module 5 (Compatibility Mode)Dokument12 SeitenModule 5 (Compatibility Mode)Eileen Le RouxNoch keine Bewertungen
- Part 3 - Short-Term Memory, Long-Term Memory and Retrospective and Prospective Memories - Centre of ExcellenceDokument6 SeitenPart 3 - Short-Term Memory, Long-Term Memory and Retrospective and Prospective Memories - Centre of ExcellenceSajid AliNoch keine Bewertungen
- Suresh Reddy - Resume - UpdatedDokument2 SeitenSuresh Reddy - Resume - UpdatedSuresh Reddy Suresh ReddyNoch keine Bewertungen
- Syllabus - SPM (R2017)Dokument2 SeitenSyllabus - SPM (R2017)tempnew85Noch keine Bewertungen
- CN3121 - PDC1 - Introduction To Process ControlDokument36 SeitenCN3121 - PDC1 - Introduction To Process ControlWen Kai LinNoch keine Bewertungen
- Unit 5 AutomationDokument39 SeitenUnit 5 AutomationAndrew lingtanNoch keine Bewertungen
- Bilingualism's Effect on Third Language LearningDokument5 SeitenBilingualism's Effect on Third Language LearningALFONSO HERNANDEZ HERNANDEZNoch keine Bewertungen
- Partial Feedback LinearizationDokument11 SeitenPartial Feedback Linearizationzamzuri_rashidNoch keine Bewertungen
- Knowledge Acquisition and Documentation StructuringDokument1 SeiteKnowledge Acquisition and Documentation StructuringRuben's OscarNoch keine Bewertungen
- Iaor - P1 PDFDokument43 SeitenIaor - P1 PDFkhawla2789Noch keine Bewertungen
- SIA CHap1Dokument12 SeitenSIA CHap19gag HAHANoch keine Bewertungen
- Midokura Japan K.K. - Software Engineer (Customer Excellence - Quality)Dokument2 SeitenMidokura Japan K.K. - Software Engineer (Customer Excellence - Quality)DanSeballosNoch keine Bewertungen
- Helmut Leitner Patterns LectureDokument1 SeiteHelmut Leitner Patterns LectureSergiu Dumulesc DemeanNoch keine Bewertungen
- Esci341 Lesson11 Energy Minimum PrincipleDokument8 SeitenEsci341 Lesson11 Energy Minimum PrincipleDilaraa AtılganNoch keine Bewertungen
- Modeling Network ReliabilityDokument16 SeitenModeling Network ReliabilityJaya BayuNoch keine Bewertungen
- Principles of Management: Cpm/PertDokument19 SeitenPrinciples of Management: Cpm/PertPushpjit MalikNoch keine Bewertungen
- Ai Performance SportsDokument2 SeitenAi Performance SportsDavid RuedaNoch keine Bewertungen
- AI Military Applications GuideDokument10 SeitenAI Military Applications Guidevishant_anandNoch keine Bewertungen
- Spare Part Management: Classification and Decision ModelsDokument24 SeitenSpare Part Management: Classification and Decision ModelsGunawan SanjayaNoch keine Bewertungen
- Nichol B. Arela Bsit 3A NightDokument3 SeitenNichol B. Arela Bsit 3A NightDugho, Lord Jean B.Noch keine Bewertungen
- Building Information SystemDokument32 SeitenBuilding Information SystemMannan KhanNoch keine Bewertungen