Das könnte Ihnen auch gefallen
- Transient Stability - Relay Controlled Actions: Etap T I PDokument9 SeitenTransient Stability - Relay Controlled Actions: Etap T I PSulaiman100% (1)
- Knowledge is "Real Power": Introduction to Power QualityVon EverandKnowledge is "Real Power": Introduction to Power QualityNoch keine Bewertungen
- AURETR130 Diagnose and Repair Starting SystemsDokument26 SeitenAURETR130 Diagnose and Repair Starting SystemsamkushNoch keine Bewertungen
- Speed Control of DC Motor-SLIDEDokument24 SeitenSpeed Control of DC Motor-SLIDEMASOUDNoch keine Bewertungen
- CTs and VTs in Protection SchemesDokument42 SeitenCTs and VTs in Protection SchemesSathiyaraj100% (1)
- Vector Shift and ROCOF ADokument2 SeitenVector Shift and ROCOF AmodantoNoch keine Bewertungen
- AURETR130 - Assessment 1 - Written Knowledge Questions - V3Dokument22 SeitenAURETR130 - Assessment 1 - Written Knowledge Questions - V3MUHAMMAD UMAR100% (1)
- MiCOM P543to546 PDFDokument824 SeitenMiCOM P543to546 PDFNagu BandaruNoch keine Bewertungen
- Alfanar Co.: Respon Sibilities Legend CSDDokument4 SeitenAlfanar Co.: Respon Sibilities Legend CSDjayabalNoch keine Bewertungen
- CALCULATING TRANSFORMER SIZING AND VOLTAGE DROP FOR LARGE MOTOR STARTINGDokument2 SeitenCALCULATING TRANSFORMER SIZING AND VOLTAGE DROP FOR LARGE MOTOR STARTINGJose Gregorio SanchezNoch keine Bewertungen
- Site Test Report Date: 29/5/2018 Contractor's Name: HADI HAIDER Customer: Sec-Eoa Jubail Commercial Port 115/13.8Kv Ss-2 Tapcon 260 Avr RelayDokument4 SeitenSite Test Report Date: 29/5/2018 Contractor's Name: HADI HAIDER Customer: Sec-Eoa Jubail Commercial Port 115/13.8Kv Ss-2 Tapcon 260 Avr RelayMuhammad NasirNoch keine Bewertungen
- Alfanar Co.: Respon Sibilities Legend CSDDokument5 SeitenAlfanar Co.: Respon Sibilities Legend CSDjayabalNoch keine Bewertungen
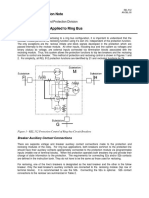
- Ring Bus Reclosing 20121217112215906Dokument6 SeitenRing Bus Reclosing 20121217112215906Rick JordanNoch keine Bewertungen
- GER4212 GE Generator Rotor Design Ops Issues Refubishment OptionsDokument28 SeitenGER4212 GE Generator Rotor Design Ops Issues Refubishment OptionsAli GhulamNoch keine Bewertungen
- TAPCON® 250 Technical OverviewDokument8 SeitenTAPCON® 250 Technical OverviewGANG WANGNoch keine Bewertungen
- Ag2015-20 20150511Dokument10 SeitenAg2015-20 20150511sikander843562Noch keine Bewertungen
- Detecting The Fault Location Using Traveling WaveDokument4 SeitenDetecting The Fault Location Using Traveling WaveSuginoMarwotoNoch keine Bewertungen
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsVon EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNoch keine Bewertungen
- By Ms. Soh Ley Bau Generation Section - Electrical Unit (Ilsas), TNBDokument137 SeitenBy Ms. Soh Ley Bau Generation Section - Electrical Unit (Ilsas), TNBAriee Arie100% (2)
- Beckwith-Optimizing Performance of Fast Bus Transfer Scheme PDFDokument5 SeitenBeckwith-Optimizing Performance of Fast Bus Transfer Scheme PDFKrishna VenkataramanNoch keine Bewertungen
- Motor 3054#2Dokument71 SeitenMotor 3054#2mateo apolinar95% (19)
- Site Inspection and Test Record: 1. General Data and InformationDokument5 SeitenSite Inspection and Test Record: 1. General Data and InformationSohail AhmedNoch keine Bewertungen
- Electrical Engg Paper PDFDokument780 SeitenElectrical Engg Paper PDFMukesh KumarNoch keine Bewertungen
- Motor Selection GuideDokument55 SeitenMotor Selection GuideElafanNoch keine Bewertungen
- Site Inspection and Test Record: 1. General Data and InformationDokument5 SeitenSite Inspection and Test Record: 1. General Data and InformationSohail AhmedNoch keine Bewertungen
- The Breaker Failure Protection BFP Schemes in UtilitiesDokument9 SeitenThe Breaker Failure Protection BFP Schemes in UtilitiesTrigras Bangun PerkasaNoch keine Bewertungen
- ABB Transformer HandbookDokument213 SeitenABB Transformer HandbookDragan Gigi100% (2)
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- Bus Tie For 415v MCCDokument5 SeitenBus Tie For 415v MCCwaleedNoch keine Bewertungen
- Analysis and Application of Scott ConnectionDokument11 SeitenAnalysis and Application of Scott ConnectionRam Uday MandalNoch keine Bewertungen
- 345kV GIS HitachiDokument16 Seiten345kV GIS HitachiSomnath DasNoch keine Bewertungen
- MiCOM P143 Opto Input and DDB MappingsDokument11 SeitenMiCOM P143 Opto Input and DDB MappingsAsmir AganovicNoch keine Bewertungen
- MICOM P546:: Two End Line Differential CT Compensation With Two Different CT RatiosDokument1 SeiteMICOM P546:: Two End Line Differential CT Compensation With Two Different CT RatiossrinivasNoch keine Bewertungen
- General Data and InformationDokument5 SeitenGeneral Data and InformationSunil SinghNoch keine Bewertungen
- Generator Cooling System Project ReportDokument73 SeitenGenerator Cooling System Project Report20-269 vinayNoch keine Bewertungen
- NZ7 ATSE (CB Class)Dokument17 SeitenNZ7 ATSE (CB Class)Rahmat Nur IlhamNoch keine Bewertungen
- Analysis of Commutation in DC MachinesDokument57 SeitenAnalysis of Commutation in DC Machinesagnostic07Noch keine Bewertungen
- KYN61-40.5 Indoor Removable AC Metal-Clad SwitchgearDokument1 SeiteKYN61-40.5 Indoor Removable AC Metal-Clad SwitchgearCLAVOTNoch keine Bewertungen
- Regulation of 3 Phase Alternator MethodsDokument12 SeitenRegulation of 3 Phase Alternator Methodsvish5936Noch keine Bewertungen
- NVA100X-Getting Started-01-2018Dokument28 SeitenNVA100X-Getting Started-01-2018Rogerio JrNoch keine Bewertungen
- Power Factor Improvement Using UpfcDokument16 SeitenPower Factor Improvement Using UpfcUday Wankar50% (2)
- Electrical Safety in MinesDokument9 SeitenElectrical Safety in MinesAnand AgrawalNoch keine Bewertungen
- NV11B Manual 01 2015Dokument205 SeitenNV11B Manual 01 2015nknfiveNoch keine Bewertungen
- Losses in TransformerDokument15 SeitenLosses in TransformerAnkit SrivastavaNoch keine Bewertungen
- 3 Phase TransformerDokument17 Seiten3 Phase TransformermdasifhassanapspdclNoch keine Bewertungen
- Generator ProtectionDokument48 SeitenGenerator Protectionjajati247Noch keine Bewertungen
- Sie91093-T1000 PlusDokument37 SeitenSie91093-T1000 PlusRoyyan Hasmi FadhillahNoch keine Bewertungen
- MMLG 01-02-03 - 04 Manual GBDokument8 SeitenMMLG 01-02-03 - 04 Manual GBethan625Noch keine Bewertungen
- Electrical SafetyDokument31 SeitenElectrical SafetyDennis BallantyneNoch keine Bewertungen
- Homework 09a-Solutions PDFDokument6 SeitenHomework 09a-Solutions PDFld393563Noch keine Bewertungen
- Paper Four Winding Transformers Part IDokument13 SeitenPaper Four Winding Transformers Part IAnielaNoch keine Bewertungen
- Guaranteed Technical Particulars of Vacuum Interrupter Type Vg4-02 Equivalent To V-207 GBDokument3 SeitenGuaranteed Technical Particulars of Vacuum Interrupter Type Vg4-02 Equivalent To V-207 GBLalit SoniNoch keine Bewertungen
- Iec 61850 Training Program: A True Hands-On Experience..Dokument6 SeitenIec 61850 Training Program: A True Hands-On Experience..Petar BozovicNoch keine Bewertungen
- Seminar PPT SFCLDokument19 SeitenSeminar PPT SFCLlalit chaudhary0% (1)
- VSC Course Lecture2Dokument27 SeitenVSC Course Lecture2eng7senNoch keine Bewertungen
- TAP changer Relay site reportDokument2 SeitenTAP changer Relay site reportganeshapec8Noch keine Bewertungen
- 17-Three Phase Transformers Part2Dokument7 Seiten17-Three Phase Transformers Part2Adithya ChandrasekaranNoch keine Bewertungen
- Transformer Overflux ProtectionDokument3 SeitenTransformer Overflux ProtectionkarthikNoch keine Bewertungen
- Corona Characteristics ThilinaDokument6 SeitenCorona Characteristics ThilinaThilina Jayaweera100% (2)
- Parchur ClampsDokument2 SeitenParchur ClampsPudeti RaghusreenivasNoch keine Bewertungen
- 04 - Transformer SizingDokument19 Seiten04 - Transformer Sizingashraf-84Noch keine Bewertungen
- Distance RelaingDokument38 SeitenDistance RelaingMuhammad Ali Khan AwanNoch keine Bewertungen
- PDFDokument9 SeitenPDFgilbertomjcNoch keine Bewertungen
- Fundamentals of Bus Bar ProtectionDokument92 SeitenFundamentals of Bus Bar ProtectionNorng VibolNoch keine Bewertungen
- DC Transformer PrincipleDokument2 SeitenDC Transformer PrincipleVijay KumarNoch keine Bewertungen
- Watt-Hour Meter TestDokument15 SeitenWatt-Hour Meter Testsherif ahmed moussaNoch keine Bewertungen
- Application Guide StroomtransformatorenDokument127 SeitenApplication Guide StroomtransformatorenJemal MusaNoch keine Bewertungen
- Advance Power SystemsDokument88 SeitenAdvance Power SystemsRachit KhannaNoch keine Bewertungen
- Power-system protection A Complete GuideVon EverandPower-system protection A Complete GuideBewertung: 1 von 5 Sternen1/5 (1)
- St. Vincent Pallotti College Electrical Installation ExamDokument2 SeitenSt. Vincent Pallotti College Electrical Installation Examptarwatkar123Noch keine Bewertungen
- Assignments EIDDokument7 SeitenAssignments EIDptarwatkar123Noch keine Bewertungen
- 7th Sem EE - EID - Attendance Record Till 30th SepDokument2 Seiten7th Sem EE - EID - Attendance Record Till 30th Sepptarwatkar123Noch keine Bewertungen
- PSP Introduction CBCSDokument14 SeitenPSP Introduction CBCSptarwatkar123Noch keine Bewertungen
- 19 Sep 2020 - PSP - Summer - 2020 - Backlog - Exam-GradesDokument4 Seiten19 Sep 2020 - PSP - Summer - 2020 - Backlog - Exam-Gradesptarwatkar123Noch keine Bewertungen
- 7SEE - EID - Assignement - 2020 - 21Dokument2 Seiten7SEE - EID - Assignement - 2020 - 21ptarwatkar123Noch keine Bewertungen
- 7SEE - EID - Assignment 02Dokument1 Seite7SEE - EID - Assignment 02ptarwatkar123Noch keine Bewertungen
- Win - 18 - Power Station PracticeDokument2 SeitenWin - 18 - Power Station Practiceptarwatkar123Noch keine Bewertungen
- Hydro Power Stations Question BankDokument2 SeitenHydro Power Stations Question Bankptarwatkar123100% (1)
- Win - 15 - Power Station PracticeDokument4 SeitenWin - 15 - Power Station Practiceptarwatkar123Noch keine Bewertungen
- Power Station Practices ExplainedDokument2 SeitenPower Station Practices Explainedptarwatkar123Noch keine Bewertungen
- University Question Bank For PSP - Unit 06Dokument1 SeiteUniversity Question Bank For PSP - Unit 06ptarwatkar123Noch keine Bewertungen
- 5th Sem. B. Tech. - Power Station Practice - BEEE505T - 30 JuneDokument3 Seiten5th Sem. B. Tech. - Power Station Practice - BEEE505T - 30 Juneptarwatkar123Noch keine Bewertungen
- Win - 17 - Power Station PracticeDokument2 SeitenWin - 17 - Power Station Practiceptarwatkar123Noch keine Bewertungen
- Nuclear Power Station Question BankDokument2 SeitenNuclear Power Station Question Bankptarwatkar123Noch keine Bewertungen
- Instructions For Pragati - Saksham - 2017-18Dokument1 SeiteInstructions For Pragati - Saksham - 2017-18ptarwatkar123Noch keine Bewertungen
- University Question Bank For PSP - Unit 05Dokument2 SeitenUniversity Question Bank For PSP - Unit 05ptarwatkar123Noch keine Bewertungen
- University Question Bank For PSP - Unit 02Dokument2 SeitenUniversity Question Bank For PSP - Unit 02ptarwatkar123Noch keine Bewertungen
- EID Unit 02 NumericalsDokument12 SeitenEID Unit 02 Numericalsptarwatkar123Noch keine Bewertungen
- University Question Bank For PSP - Unit 01Dokument3 SeitenUniversity Question Bank For PSP - Unit 01ptarwatkar123Noch keine Bewertungen
- Transslide DemoDokument6 SeitenTransslide Demoptarwatkar123Noch keine Bewertungen
- CPM Pert Multiple Choice Questions and AnswersDokument2 SeitenCPM Pert Multiple Choice Questions and Answersptarwatkar123Noch keine Bewertungen
- EID Unit 02 Numericals PDFDokument12 SeitenEID Unit 02 Numericals PDFptarwatkar123Noch keine Bewertungen
- Photovoltaic Cell Fed 3-Phase Induction Motor Using MPPT TechniqueDokument8 SeitenPhotovoltaic Cell Fed 3-Phase Induction Motor Using MPPT Techniqueptarwatkar123Noch keine Bewertungen
- Combine Pragati & SakshamDokument2 SeitenCombine Pragati & SakshamAnonymous 3fZjfJuNoch keine Bewertungen
- EID Unit 03 Numerical PDFDokument24 SeitenEID Unit 03 Numerical PDFptarwatkar123Noch keine Bewertungen
- EID Unit 03 Numerical PDFDokument24 SeitenEID Unit 03 Numerical PDFptarwatkar123Noch keine Bewertungen
- Industrial Automation Architecture LevelsDokument11 SeitenIndustrial Automation Architecture Levelsnikpetar1Noch keine Bewertungen
- Industrial Automation Architecture LevelsDokument11 SeitenIndustrial Automation Architecture Levelsnikpetar1Noch keine Bewertungen
- Low Cost High Power DensityDokument7 SeitenLow Cost High Power Densityrakeshee2007Noch keine Bewertungen
- 07 Rr410208 Computer Aided Design of Electrical MachinesDokument4 Seiten07 Rr410208 Computer Aided Design of Electrical MachinesandhracollegesNoch keine Bewertungen
- Final Training ReportDokument70 SeitenFinal Training ReportkushalchandelNoch keine Bewertungen
- Retardation TestDokument53 SeitenRetardation Testkiran_y2100% (9)
- 500 - SET19294-03-Generator Technical SpecificationDokument20 Seiten500 - SET19294-03-Generator Technical SpecificationAndres DNoch keine Bewertungen
- Semi Finals - Finals Lec - Ac DC MachineryDokument33 SeitenSemi Finals - Finals Lec - Ac DC MachineryJohnlloyd BarretoNoch keine Bewertungen
- DC Generator GuideDokument9 SeitenDC Generator GuidemarpelNoch keine Bewertungen
- Chapter-3 Switch Reluctance Motor Characteristics 3.1 Switched Reluctance MotorDokument9 SeitenChapter-3 Switch Reluctance Motor Characteristics 3.1 Switched Reluctance MotorSree GaneshNoch keine Bewertungen
- WEG Synchronous Motors 50019091 Brochure English PDFDokument16 SeitenWEG Synchronous Motors 50019091 Brochure English PDFVlad MocanuNoch keine Bewertungen
- Sastra University: B.Tech (Eee) ProgrammeDokument14 SeitenSastra University: B.Tech (Eee) ProgrammeSriram VenkatachariNoch keine Bewertungen
- Electrical Actuation SystemsDokument67 SeitenElectrical Actuation SystemsMOHAMMED IRSHADNoch keine Bewertungen
- 2929 Ijecs Ijens PDFDokument6 Seiten2929 Ijecs Ijens PDFbahmanNoch keine Bewertungen
- Basics of Electric MotorsDokument16 SeitenBasics of Electric Motorshodeegits9526Noch keine Bewertungen
- g224 Matlabi - Ir Simulation of Synchronous Generator Dynamic Operation Characteristics PDFDokument3 Seiteng224 Matlabi - Ir Simulation of Synchronous Generator Dynamic Operation Characteristics PDFaswardiNoch keine Bewertungen
- Chapter 1.1 DC GeneratorDokument120 SeitenChapter 1.1 DC GeneratorMohammed M. ShobakiNoch keine Bewertungen
- IEEE STD 1068 Reparación de MotoresDokument28 SeitenIEEE STD 1068 Reparación de MotoresYesenia Valencia RodriguezNoch keine Bewertungen
- Ac and DC Machines Objectives Type QuestionsDokument6 SeitenAc and DC Machines Objectives Type QuestionsJohn Norie BaydalNoch keine Bewertungen
- Notes DC MACHINES - Compound PDFDokument8 SeitenNotes DC MACHINES - Compound PDFJm PotenciandoNoch keine Bewertungen
- DC Motor Speed ControlDokument24 SeitenDC Motor Speed ControlSumu Talal50% (2)