Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Introduction To Machine-And Assembly-Language Programming: Prepared For Tynan (And Other Crazy People)Dokument17 SeitenIntroduction To Machine-And Assembly-Language Programming: Prepared For Tynan (And Other Crazy People)anon_25735840Noch keine Bewertungen
- IceDokument246 SeitenIceDaniel Madan Raja SNoch keine Bewertungen
- Micro ProcessorDokument442 SeitenMicro ProcessorMegha Anand0% (1)
- Operating Systems Question Bank and SolutionDokument32 SeitenOperating Systems Question Bank and SolutionMahesh S Gour50% (2)
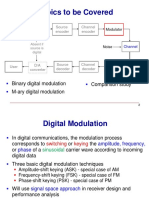
- Topics To Be Covered: Binary Digital Modulation M-Ary Digital Modulation Comparison StudyDokument26 SeitenTopics To Be Covered: Binary Digital Modulation M-Ary Digital Modulation Comparison StudyDaniel Madan Raja SNoch keine Bewertungen
- Chapter IVDokument31 SeitenChapter IVDaniel Madan Raja SNoch keine Bewertungen
- Chap 2Dokument65 SeitenChap 2Daniel Madan Raja SNoch keine Bewertungen
- Discrete-Time Signals and Systems: H. C. So Semester B, 2011-2012Dokument50 SeitenDiscrete-Time Signals and Systems: H. C. So Semester B, 2011-2012Daniel Madan Raja SNoch keine Bewertungen
- Chap 2Dokument65 SeitenChap 2Daniel Madan Raja SNoch keine Bewertungen
- 8085 Microprocessor Kit DescriptionDokument51 Seiten8085 Microprocessor Kit DescriptionPrince Blissful100% (1)
- Computer Organization and Architecture Assignment - 2: 1 KnreddyDokument6 SeitenComputer Organization and Architecture Assignment - 2: 1 KnreddyRajeshkannan A.RNoch keine Bewertungen
- Computer BasicsDokument32 SeitenComputer BasicsDaryel CastelinoNoch keine Bewertungen
- Electrical Engineering Laboratory I Course Code: Ece501Dokument9 SeitenElectrical Engineering Laboratory I Course Code: Ece501Nur Hidayatudeen Iman SukirmanNoch keine Bewertungen
- Microprocessor Based System DesignDokument55 SeitenMicroprocessor Based System DesignAnkit GroverNoch keine Bewertungen
- Sistem Mikropemproses & PengawalmikroDokument388 SeitenSistem Mikropemproses & Pengawalmikrozahrim100% (1)
- Addressing Modes&InstructionsDokument122 SeitenAddressing Modes&InstructionsRamesh Areapally100% (1)
- Final Lecture Chapter 3 - Part 3 - 8086 Instruction SetsDokument60 SeitenFinal Lecture Chapter 3 - Part 3 - 8086 Instruction SetsAman BazeNoch keine Bewertungen
- Lecture 6 - Address Mapping & ReplacementDokument29 SeitenLecture 6 - Address Mapping & ReplacementKartik KundalNoch keine Bewertungen
- 1478175959468-CSE&IT StreamDokument55 Seiten1478175959468-CSE&IT StreamsaiprashantNoch keine Bewertungen
- 8085 BasicsDokument34 Seiten8085 BasicsPrakash MoorthyNoch keine Bewertungen
- This Set of Computer Fundamentals Multiple Choice Questions & Answers (MCQS) Focuses On "The Input Unit"Dokument44 SeitenThis Set of Computer Fundamentals Multiple Choice Questions & Answers (MCQS) Focuses On "The Input Unit"Virtual BrainsNoch keine Bewertungen
- Introduction To MicroprocessorDokument20 SeitenIntroduction To MicroprocessorNiharika KorukondaNoch keine Bewertungen
- MPMC Lecture 3Dokument16 SeitenMPMC Lecture 3Soumya Ranjan PandaNoch keine Bewertungen
- Computer Concept and Web Technology: Cse 3Rd Semester Jkie BilaspurDokument98 SeitenComputer Concept and Web Technology: Cse 3Rd Semester Jkie Bilaspurmd.zainul haqueNoch keine Bewertungen
- Microprocessor 80486Dokument6 SeitenMicroprocessor 80486Gaurav BisaniNoch keine Bewertungen
- Chapter7 PointersDokument20 SeitenChapter7 PointersMuhd RzwanNoch keine Bewertungen
- Intel 8257 Programmable DMA ControllerDokument17 SeitenIntel 8257 Programmable DMA Controllergodfrzero0% (1)
- PIC 18F452 Instruction SetDokument51 SeitenPIC 18F452 Instruction SetMohan NatrajanNoch keine Bewertungen
- Addressing Modes of 8051 MicrocontrollerDokument21 SeitenAddressing Modes of 8051 MicrocontrollerrameshNoch keine Bewertungen
- 2017-CS8493-Operating System-Dr. D. Loganathan PDFDokument37 Seiten2017-CS8493-Operating System-Dr. D. Loganathan PDFRADHANoch keine Bewertungen
- PIC18 (L) F2X/4XK22: 5.4 Data Memory OrganizationDokument10 SeitenPIC18 (L) F2X/4XK22: 5.4 Data Memory OrganizationLuis Enrique Vega CajahuaringaNoch keine Bewertungen
- Types of Addressing ModeDokument14 SeitenTypes of Addressing ModeMukesh Mushya0% (1)
- Problem CacheMemory1Dokument9 SeitenProblem CacheMemory1buulaaatNoch keine Bewertungen
- New Mca Microprocessor MCQDokument11 SeitenNew Mca Microprocessor MCQnegikamal703Noch keine Bewertungen
- Computer Hardware 1Dokument38 SeitenComputer Hardware 1ErupeNoch keine Bewertungen
- Module 1: Basic Structure of Computers 1.1 Basic Operational ConceptsDokument34 SeitenModule 1: Basic Structure of Computers 1.1 Basic Operational Conceptsyashu JNoch keine Bewertungen