Das könnte Ihnen auch gefallen
- Robot Dynamics PDFDokument56 SeitenRobot Dynamics PDFPuru GaurNoch keine Bewertungen
- 53 - 36765 - ME594 - 2014 - 1 - 2 - 1 - Homogeneous TransformationDokument21 Seiten53 - 36765 - ME594 - 2014 - 1 - 2 - 1 - Homogeneous TransformationHariharanNoch keine Bewertungen
- 3d Viewing TransDokument70 Seiten3d Viewing TransSrinath Gm G MNoch keine Bewertungen
- Chapter 3 C DH Representation For Robotic ManipulatorsDokument88 SeitenChapter 3 C DH Representation For Robotic ManipulatorsCharlton S.Inao100% (1)
- A1+ Progress Test 4Dokument4 SeitenA1+ Progress Test 4Quynh Hoang NgocNoch keine Bewertungen
- Robotics Control L3Dokument105 SeitenRobotics Control L3Lavesh GoyalNoch keine Bewertungen
- 04 OnScreen C1 Quiz 2BDokument2 Seiten04 OnScreen C1 Quiz 2BIrenaNikolovskaNoch keine Bewertungen
- 2012 Book RobotMotionAndControl2011Dokument425 Seiten2012 Book RobotMotionAndControl2011鄭至峻Noch keine Bewertungen
- Camera Parameters Intrinsic - Extrinsic PDFDokument35 SeitenCamera Parameters Intrinsic - Extrinsic PDFAhmad DanielNoch keine Bewertungen
- Lec3 Forward KinematicsDokument18 SeitenLec3 Forward KinematicsbalkyderNoch keine Bewertungen
- Introduction To ROBOTICS: Kinematics of Robot ManipulatorDokument44 SeitenIntroduction To ROBOTICS: Kinematics of Robot ManipulatorEric KerrNoch keine Bewertungen
- Introduction To ROBOTICS: Kinematics of Robot ManipulatorDokument44 SeitenIntroduction To ROBOTICS: Kinematics of Robot ManipulatoranantheshkNoch keine Bewertungen
- 2012-1807. Kinematics Robot ManipulatorsDokument39 Seiten2012-1807. Kinematics Robot Manipulatorssudhanshu22kumar22Noch keine Bewertungen
- Robot Kinematics - TransformationDokument57 SeitenRobot Kinematics - TransformationHoney RathoreNoch keine Bewertungen
- Jacobi AnDokument34 SeitenJacobi Anfitri puji rahayuNoch keine Bewertungen
- Position and Orientation of Rigid Bodies: Robotics 1Dokument20 SeitenPosition and Orientation of Rigid Bodies: Robotics 1Aland BravoNoch keine Bewertungen
- Position and Orientation of Rigid Bodies: Robotics 1Dokument62 SeitenPosition and Orientation of Rigid Bodies: Robotics 1Narayan ManeNoch keine Bewertungen
- Lec2 Forward KinematicsDokument22 SeitenLec2 Forward KinematicsbalkyderNoch keine Bewertungen
- Introduction To ROBOTICS: Kinematics of Robot ManipulatorDokument44 SeitenIntroduction To ROBOTICS: Kinematics of Robot Manipulatorharikiran3285Noch keine Bewertungen
- DynamicsDokument41 SeitenDynamicsHùng TrầnNoch keine Bewertungen
- Chapter - 2 - Classification - of - RobotsDokument40 SeitenChapter - 2 - Classification - of - Robotsbrestgy1415Noch keine Bewertungen
- Rodrigues Vectors, Unit Quaternions: 27-750 A.D. (Tony) Rollett, S. R. WilsonDokument29 SeitenRodrigues Vectors, Unit Quaternions: 27-750 A.D. (Tony) Rollett, S. R. WilsonalfanNoch keine Bewertungen
- R4-Forward and Inverse KinematicsDokument31 SeitenR4-Forward and Inverse Kinematicsahmod202120Noch keine Bewertungen
- Robot Movement in SpaceDokument11 SeitenRobot Movement in Spacekanuni41Noch keine Bewertungen
- Representation of An Object in 3-D: Robot KinematicsDokument27 SeitenRepresentation of An Object in 3-D: Robot Kinematicssopnashree jenaNoch keine Bewertungen
- Robotiğe GirişDokument28 SeitenRobotiğe Girişismail demirciNoch keine Bewertungen
- FALLSEM2020-21 EEE4027 ETH VL2020210101487 Reference Material I 03-Aug-2020 Robot KinematicsDokument29 SeitenFALLSEM2020-21 EEE4027 ETH VL2020210101487 Reference Material I 03-Aug-2020 Robot KinematicsAtri AcharyaNoch keine Bewertungen
- Points and Planes in 3DDokument30 SeitenPoints and Planes in 3DAbsarNoch keine Bewertungen
- Introduction To ROBOTICS: Kinematics of Robot ManipulatorDokument80 SeitenIntroduction To ROBOTICS: Kinematics of Robot ManipulatorHuu NguyenNoch keine Bewertungen
- SESM3004 Fluid Mechanics: DR Anatoliy VorobevDokument16 SeitenSESM3004 Fluid Mechanics: DR Anatoliy VorobevRN Builder IpohNoch keine Bewertungen
- Linear Algebra and SVD: (Some Slides Adapted From Octavia Camps)Dokument24 SeitenLinear Algebra and SVD: (Some Slides Adapted From Octavia Camps)Sakshi Popli ChopraNoch keine Bewertungen
- TransformationDokument48 SeitenTransformationAhmed AbdelsattarNoch keine Bewertungen
- Kinematics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentDokument47 SeitenKinematics: Amirkabir University of Technology Computer Engineering & Information Technology DepartmentAIrobotNoch keine Bewertungen
- CH 3Dokument28 SeitenCH 3jiales225Noch keine Bewertungen
- 6-Structures For DSPDokument54 Seiten6-Structures For DSPBomber KillerNoch keine Bewertungen
- Robotics: Ertuğrul ÇetinsoyDokument17 SeitenRobotics: Ertuğrul ÇetinsoyBekir AçıkçaNoch keine Bewertungen
- RAY CASTING - CG - ShantikBhalerao - 22139Dokument9 SeitenRAY CASTING - CG - ShantikBhalerao - 22139Mahesh UgileNoch keine Bewertungen
- Introduction To RoboticsDokument32 SeitenIntroduction To RoboticsNagarjun SinghNoch keine Bewertungen
- 02 KinematicsDokument69 Seiten02 KinematicsMd MohinoddinNoch keine Bewertungen
- 3 DtransformDokument10 Seiten3 DtransformokuwobiNoch keine Bewertungen
- WINSEM2022-23 EEE4027 ETH VL2022230502380 Reference Material II 10-01-2023 Homogeneous TransformationDokument32 SeitenWINSEM2022-23 EEE4027 ETH VL2022230502380 Reference Material II 10-01-2023 Homogeneous TransformationJOEL STEPHEN 19BEE0262Noch keine Bewertungen
- Unit 4 Kinematic of Rigid BodiesDokument49 SeitenUnit 4 Kinematic of Rigid BodiesManish ChaudharyNoch keine Bewertungen
- Saito24 Raman6 GrouptheoryDokument20 SeitenSaito24 Raman6 Grouptheory姜義修Noch keine Bewertungen
- 5 Axis MachinesDokument33 Seiten5 Axis MachinesgsNoch keine Bewertungen
- Electromagnetic Fields: Subject PCC-EE - 216G Semester: VIDokument86 SeitenElectromagnetic Fields: Subject PCC-EE - 216G Semester: VInikitaNoch keine Bewertungen
- The Inverse Z-Transform: 1 Dr. B. Khan CECOS UniversityDokument48 SeitenThe Inverse Z-Transform: 1 Dr. B. Khan CECOS UniversityUmer EhsanNoch keine Bewertungen
- Kinematic Analysis of Stanford ArmDokument31 SeitenKinematic Analysis of Stanford ArmabhishekNoch keine Bewertungen
- Vibration Analysis of A Exible Rotating Disk With Angular MisalignmentDokument21 SeitenVibration Analysis of A Exible Rotating Disk With Angular MisalignmentAmable FuentesNoch keine Bewertungen
- Sim 3D TRANSFORMATIONS FinalDokument22 SeitenSim 3D TRANSFORMATIONS FinalVaishakh SasikumarNoch keine Bewertungen
- 04 - Flowing Fluid and Pressure VariationDokument36 Seiten04 - Flowing Fluid and Pressure VariationKhalid Al-yhyaeNoch keine Bewertungen
- Multi-Satellite Missions: February, 2019Dokument41 SeitenMulti-Satellite Missions: February, 2019Alexander HarlanNoch keine Bewertungen
- Arbitary Rotation ProofDokument3 SeitenArbitary Rotation Proofmohamed2010526Noch keine Bewertungen
- PHYS 170 November 8, 2019Dokument28 SeitenPHYS 170 November 8, 2019Andrew WangNoch keine Bewertungen
- Fundamentals of Robotics 04Dokument56 SeitenFundamentals of Robotics 04noorulain66.csNoch keine Bewertungen
- Kinematic Models and ConstraintsDokument43 SeitenKinematic Models and Constraintsanitha_eswaranNoch keine Bewertungen
- Cylindrical Coordinate System FDokument14 SeitenCylindrical Coordinate System FRajeshNoch keine Bewertungen
- Chapter 2 Spatial Descriptions and TransformationsDokument99 SeitenChapter 2 Spatial Descriptions and TransformationsKeith wongNoch keine Bewertungen
- Động lực học và điều khiển robot: Robot manipulator and controlDokument55 SeitenĐộng lực học và điều khiển robot: Robot manipulator and controlTu My LamNoch keine Bewertungen
- ComputerGraphics 3D Part2Dokument100 SeitenComputerGraphics 3D Part2api-3799599Noch keine Bewertungen
- Rotation W.R.T Current Frame and Fixed FrameDokument15 SeitenRotation W.R.T Current Frame and Fixed FrameNathan ShankarNoch keine Bewertungen
- A Summary of AVO and Inversion TechniquesDokument69 SeitenA Summary of AVO and Inversion TechniquesriyadiNoch keine Bewertungen
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64Von EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64Noch keine Bewertungen
- Miniature Robotic Hand For Object DisposalDokument16 SeitenMiniature Robotic Hand For Object DisposalDeepak SalianNoch keine Bewertungen
- LogDokument52 SeitenLogSamira CorreiaNoch keine Bewertungen
- Is It Ethical To Replace Human Workers With AutomationDokument2 SeitenIs It Ethical To Replace Human Workers With AutomationEmir İbramoğlu100% (1)
- 01 Activity 1Dokument2 Seiten01 Activity 1Jhon Michael FerrerNoch keine Bewertungen
- Hytech PowerDokument14 SeitenHytech Powerharrrypotter20Noch keine Bewertungen
- Concepts Related To Artificial IntelligenceDokument4 SeitenConcepts Related To Artificial IntelligencePapelería MamNoch keine Bewertungen
- Advanced Robotıcs: General Concept On Mobile RoboticsDokument16 SeitenAdvanced Robotıcs: General Concept On Mobile RoboticsBelaliaNoch keine Bewertungen
- Dmpa - 12 - Unidad Iii - Tercero - Inlges B NS - 2021Dokument6 SeitenDmpa - 12 - Unidad Iii - Tercero - Inlges B NS - 2021Udad ManchegoNoch keine Bewertungen
- Robotic Arm Instructions 1Dokument10 SeitenRobotic Arm Instructions 1twe3kNoch keine Bewertungen
- EE381 Lec1 Week1Dokument98 SeitenEE381 Lec1 Week1Fatima IqbalNoch keine Bewertungen
- Jovian Chronicles DP9-301 - Jovian Chronicles RulebookDokument234 SeitenJovian Chronicles DP9-301 - Jovian Chronicles Rulebookthevoltiguer83% (6)
- Liu 2019Dokument6 SeitenLiu 2019Nirban DasNoch keine Bewertungen
- Neural-Network QuestionsDokument3 SeitenNeural-Network Questions66umer660% (1)
- Chapter 10 Business Analytics AssignementsDokument7 SeitenChapter 10 Business Analytics Assignementschris waltersNoch keine Bewertungen
- MTID322 Lab2 W21Dokument7 SeitenMTID322 Lab2 W21ronyNoch keine Bewertungen
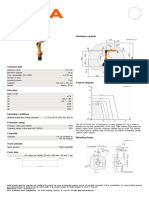
- KR 10 R1100 Sixx: Workspace GraphicDokument1 SeiteKR 10 R1100 Sixx: Workspace GraphicJose Gabriel Aguirre AndradeNoch keine Bewertungen
- Fluid Systems SyllabusDokument2 SeitenFluid Systems SyllabusGeetha Sai KumarNoch keine Bewertungen
- Mechanical Design and Control of Inflatable Robotic Arms For High Positioning AccuracyDokument17 SeitenMechanical Design and Control of Inflatable Robotic Arms For High Positioning AccuracyDaniel Bustillos VilaNoch keine Bewertungen
- Latihan UTS 2Dokument5 SeitenLatihan UTS 2Okto NwpNoch keine Bewertungen
- Motoman AR1440: Arc Welding With The AR-seriesDokument2 SeitenMotoman AR1440: Arc Welding With The AR-seriesMayank JainNoch keine Bewertungen
- Designing of An Amphibian Hexapod With Computer Vision For Rescue OperationsDokument7 SeitenDesigning of An Amphibian Hexapod With Computer Vision For Rescue OperationsChiranjeev SinghNoch keine Bewertungen
- Bece312l Robotics-And-Automation TH 1.0 75 Bece312lDokument2 SeitenBece312l Robotics-And-Automation TH 1.0 75 Bece312lViswanadh VankamamidiNoch keine Bewertungen
- Lecture 2 Mobility of Mechanisms Dr. Othman HassanDokument16 SeitenLecture 2 Mobility of Mechanisms Dr. Othman Hassanmohamed hemdanNoch keine Bewertungen
- Tomy Omnibot 2000 ManualDokument48 SeitenTomy Omnibot 2000 ManualTheOldRobotNoch keine Bewertungen
- Activity N°7Dokument3 SeitenActivity N°7pablodohacNoch keine Bewertungen
- Nanorobotics: Nithya .M Roll No:16Dokument20 SeitenNanorobotics: Nithya .M Roll No:16Nithya MothangaNoch keine Bewertungen
- Robotics Safety ContractDokument1 SeiteRobotics Safety Contractapi-327894432Noch keine Bewertungen