Das könnte Ihnen auch gefallen
- Automotive Diagnostic Systems: Understanding OBD-I & OBD-II RevisedVon EverandAutomotive Diagnostic Systems: Understanding OBD-I & OBD-II RevisedBewertung: 4 von 5 Sternen4/5 (3)
- New Vistas On Automotive Embedded Systems: Edited and Presented by Alberto Sangiovanni-Vincentelli UC BerkeleyDokument25 SeitenNew Vistas On Automotive Embedded Systems: Edited and Presented by Alberto Sangiovanni-Vincentelli UC BerkeleyAnita IonelaNoch keine Bewertungen
- 1 車用 CAN Bus 網路技術探討Dokument72 Seiten1 車用 CAN Bus 網路技術探討Wan Tak SiNoch keine Bewertungen
- Microcontroller Pic-And-EepromDokument22 SeitenMicrocontroller Pic-And-Eepromwanisuyog88100% (1)
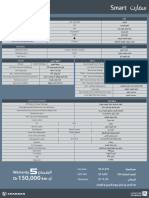
- CS35 Plus Spec Sheet 2024 UpdatedDokument1 SeiteCS35 Plus Spec Sheet 2024 Updatedpathan_riyazkhanNoch keine Bewertungen
- Error CodesDokument72 SeitenError CodesAnthony Tiriba100% (3)
- Embedded System Design BSC 01Dokument80 SeitenEmbedded System Design BSC 01Tigabu YayaNoch keine Bewertungen
- R30ca0181ed0200 Winning ComboDokument40 SeitenR30ca0181ed0200 Winning ComboVanHieu LuyenNoch keine Bewertungen
- AUT F0615 Automotive Instrument Cluster Solutions From Low Line To Premium LineDokument47 SeitenAUT F0615 Automotive Instrument Cluster Solutions From Low Line To Premium LineWan Shahmisufi100% (1)
- Updated Digiscan Brochure - 29 NovDokument6 SeitenUpdated Digiscan Brochure - 29 NovTN47 BabyNoch keine Bewertungen
- VastraJet Engineers Training ManualDokument90 SeitenVastraJet Engineers Training ManualKRISHNANoch keine Bewertungen
- Automotive ElectronicsDokument22 SeitenAutomotive ElectronicsMadhusudhanan RavishankarNoch keine Bewertungen
- Advanced Motion Controls DZCANTE-012L080Dokument8 SeitenAdvanced Motion Controls DZCANTE-012L080Servo2GoNoch keine Bewertungen
- Advanced Motion Controls DZCANTE-040L080Dokument8 SeitenAdvanced Motion Controls DZCANTE-040L080Servo2GoNoch keine Bewertungen
- Cisco CPRIDokument88 SeitenCisco CPRIHoàng TrườngNoch keine Bewertungen
- Automatic Car Parking SystemDokument2 SeitenAutomatic Car Parking SystemCrispNoch keine Bewertungen
- 08GPCat SinglePhaseDCDokument22 Seiten08GPCat SinglePhaseDCSAMO SAMARANoch keine Bewertungen
- Lisec Glass Cutting Table Machine Retrofit - Saint GobainDokument1 SeiteLisec Glass Cutting Table Machine Retrofit - Saint GobaineacondeNoch keine Bewertungen
- Catalog 2013Dokument38 SeitenCatalog 2013Mahmoud ElrefaeyNoch keine Bewertungen
- GTFFR TfytbghbDokument9 SeitenGTFFR TfytbghbbrahimNoch keine Bewertungen
- 20.0us $ - All Data Pro Alldata 10.53 Auto Repair Software Moto Heavy Duty Vivid Workshop Full Set 1Tb HDD For Car Truck Diagnostic Tools AliexpressDokument5 Seiten20.0us $ - All Data Pro Alldata 10.53 Auto Repair Software Moto Heavy Duty Vivid Workshop Full Set 1Tb HDD For Car Truck Diagnostic Tools Aliexpressravenhotrods64Noch keine Bewertungen
- 1220e Datasheet enDokument6 Seiten1220e Datasheet enAlexandra GarciaNoch keine Bewertungen
- National - Automotive - Solutions AutomotiveDokument32 SeitenNational - Automotive - Solutions AutomotiveEdsonNoch keine Bewertungen
- Acer Nitro 5 AN515-52 Compal FH52M LA-J891P Rev 0.1 Schematic DiagramDokument112 SeitenAcer Nitro 5 AN515-52 Compal FH52M LA-J891P Rev 0.1 Schematic DiagramJavier GonzalezNoch keine Bewertungen
- RJ45CR3540Dokument2 SeitenRJ45CR3540prajapatirajesh1242Noch keine Bewertungen
- Advanced Motion Controls DPQNNIE-025B200Dokument11 SeitenAdvanced Motion Controls DPQNNIE-025B200Servo2GoNoch keine Bewertungen
- Byd Folder SealDokument7 SeitenByd Folder Sealsamsmack69Noch keine Bewertungen
- Telematic SupplementDokument14 SeitenTelematic SupplementStuart SainsburyNoch keine Bewertungen
- Elm327 PDFDokument1 SeiteElm327 PDFAmeer AbdoNoch keine Bewertungen
- Auto Repair Technician Home: Home BMW Coding Auto Key Program Download & Installation DPF Tpms Shop Contact UsDokument12 SeitenAuto Repair Technician Home: Home BMW Coding Auto Key Program Download & Installation DPF Tpms Shop Contact UsStefBeck BeckNoch keine Bewertungen
- Advanced Motion Controls DPCANTE-025B200Dokument10 SeitenAdvanced Motion Controls DPCANTE-025B200Servo2GoNoch keine Bewertungen
- MotionUSA Line CardDokument2 SeitenMotionUSA Line CardCarlos Luis GutierrezNoch keine Bewertungen
- Škoda Auto A.S. - The International WebsiteDokument4 SeitenŠkoda Auto A.S. - The International WebsiteRitz DurmiendoNoch keine Bewertungen
- Embedded Vision and The Convergence Between Computer and Machine VisionDokument16 SeitenEmbedded Vision and The Convergence Between Computer and Machine Visionjeanca32Noch keine Bewertungen
- Low Cost, Complete 12-Bit Resolver-to-Digital Converter: CS Is Logic HIDokument12 SeitenLow Cost, Complete 12-Bit Resolver-to-Digital Converter: CS Is Logic HIFrantsiskoNoch keine Bewertungen
- DS - 20210726 - SG3.0 3.6 4.0 5.0 6.0RS - V1.2.4 - enDokument2 SeitenDS - 20210726 - SG3.0 3.6 4.0 5.0 6.0RS - V1.2.4 - enFaridoke 3112Noch keine Bewertungen
- PDFDokument103 SeitenPDFEduRoiNoch keine Bewertungen
- CGC 400 Data Sheet 4921240426 UK - 2016.10.10Dokument11 SeitenCGC 400 Data Sheet 4921240426 UK - 2016.10.10bacNoch keine Bewertungen
- SSDC SeriesDokument48 SeitenSSDC SeriesCông NguyễnNoch keine Bewertungen
- Advanced Motion Controls DPQNNIE-030A800Dokument11 SeitenAdvanced Motion Controls DPQNNIE-030A800Servo2GoNoch keine Bewertungen
- Hectronic - FMS SolutionDokument23 SeitenHectronic - FMS SolutionJuanNoch keine Bewertungen
- Q Meter or RLC Meter or Quality Meter Working, Construction, & CalculationDokument13 SeitenQ Meter or RLC Meter or Quality Meter Working, Construction, & Calculationdan andreiNoch keine Bewertungen
- Advanced Motion Controls DPQNNIE-015B200Dokument10 SeitenAdvanced Motion Controls DPQNNIE-015B200Servo2GoNoch keine Bewertungen
- Detroit Transmissions Electronic ACRONYMSDokument4 SeitenDetroit Transmissions Electronic ACRONYMScells-crosser0xNoch keine Bewertungen
- Gd350a Catalog v2.0Dokument2 SeitenGd350a Catalog v2.0ZE RU ENGNoch keine Bewertungen
- Ds 20220516 sh3.0 3.6 4.0 5.0 6.0rs Datasheet v13 En-1Dokument2 SeitenDs 20220516 sh3.0 3.6 4.0 5.0 6.0rs Datasheet v13 En-1kbartelsNoch keine Bewertungen
- A4 Data LinkDokument5 SeitenA4 Data Linkbreyesdelgadillo92Noch keine Bewertungen
- Acs 140Dokument5 SeitenAcs 140FiveStarNoch keine Bewertungen
- Automotive Electronics: A Perspective On In-Motorcycle and In-Car Electronic SystemsDokument24 SeitenAutomotive Electronics: A Perspective On In-Motorcycle and In-Car Electronic SystemspaulwaNoch keine Bewertungen
- Electric From SERVDokument4 SeitenElectric From SERVmkNoch keine Bewertungen
- LA-H492P v0.1Dokument100 SeitenLA-H492P v0.1Mike OtteNoch keine Bewertungen
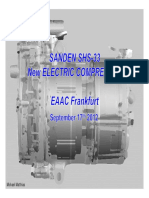
- Sanden Michael Matthias1 CompressorDokument14 SeitenSanden Michael Matthias1 CompressorAnonymous 9xvU1FNoch keine Bewertungen
- Sanden-Michael-Matthias1 Compressor PDFDokument14 SeitenSanden-Michael-Matthias1 Compressor PDF임학진0% (1)
- Advanced Packaging TrendsDokument36 SeitenAdvanced Packaging TrendsGabriel Donovan100% (1)
- Advanced Motion Controls DZRALTE-040L080Dokument8 SeitenAdvanced Motion Controls DZRALTE-040L080Servo2GoNoch keine Bewertungen
- Schematics E50Dokument9 SeitenSchematics E50pronomix100% (3)
- Material Caterpillar 777d Off Highway Truck Machine Electronics Components Signals Input Output Devices ControlsDokument32 SeitenMaterial Caterpillar 777d Off Highway Truck Machine Electronics Components Signals Input Output Devices ControlsRoussel Florez Zuloaga100% (1)
- xEV Inverter Solution With An Inductive Position Sensor Application Model and Software PDFDokument46 SeitenxEV Inverter Solution With An Inductive Position Sensor Application Model and Software PDFkrishrohanNoch keine Bewertungen
- Basicele Electriciadad y SensoresDokument41 SeitenBasicele Electriciadad y SensoresCarcaustoCatt Benk100% (2)
- Candidate Sample CVDokument3 SeitenCandidate Sample CVJitesh PatelNoch keine Bewertungen
- Cisco ActualTests 210-260 v2015-12-10 by EmyDokument68 SeitenCisco ActualTests 210-260 v2015-12-10 by EmyJitesh PatelNoch keine Bewertungen
- Candidate Sample CVDokument3 SeitenCandidate Sample CVJitesh PatelNoch keine Bewertungen
- Candidate Sample CVDokument3 SeitenCandidate Sample CVJitesh PatelNoch keine Bewertungen
- Cisco ActualTests 210-260 v2015-12-15 by Dim 89qDokument38 SeitenCisco ActualTests 210-260 v2015-12-15 by Dim 89qJitesh PatelNoch keine Bewertungen
- CCNA Security 210-260 Dump + Explanation (Updating ) - Script KiddieDokument154 SeitenCCNA Security 210-260 Dump + Explanation (Updating ) - Script KiddieJitesh PatelNoch keine Bewertungen
- 210-260 Exam Dumps With PDF and VCE Download (1-30)Dokument24 Seiten210-260 Exam Dumps With PDF and VCE Download (1-30)Francisco Contreras AlcainoNoch keine Bewertungen
- CCNPguy210-260 V1Dokument60 SeitenCCNPguy210-260 V1Jitesh PatelNoch keine Bewertungen
- Asses Ment 1Dokument16 SeitenAsses Ment 1Jitesh PatelNoch keine Bewertungen
- 210-260 Exam Dumps With PDF and VCE Download (1-30)Dokument24 Seiten210-260 Exam Dumps With PDF and VCE Download (1-30)Francisco Contreras AlcainoNoch keine Bewertungen
- DoBetterScrum 09version v3.02Dokument68 SeitenDoBetterScrum 09version v3.02Jitesh PatelNoch keine Bewertungen
- Design Synthesis and Optimization For Automotive Embedded SystemsDokument36 SeitenDesign Synthesis and Optimization For Automotive Embedded SystemsJitesh PatelNoch keine Bewertungen
- SessionDokument1 SeiteSessionJHNoch keine Bewertungen
- Dell Precision Mobile Workstation M4800 Owner's Manual: Downloaded From Manuals Search EngineDokument83 SeitenDell Precision Mobile Workstation M4800 Owner's Manual: Downloaded From Manuals Search EngineJitesh PatelNoch keine Bewertungen
- A Look Inside Battery Management SystemsDokument8 SeitenA Look Inside Battery Management SystemsJitesh PatelNoch keine Bewertungen
- SitusDokument1 SeiteSitusJitesh PatelNoch keine Bewertungen
- AN Simple OOP in CDokument15 SeitenAN Simple OOP in CTrọngBằngNguyễnNoch keine Bewertungen
- Samsung Phones EnglishDokument25 SeitenSamsung Phones EnglishJAYAKUMAR PvNoch keine Bewertungen
- Interview - QST Ans TelecomDokument19 SeitenInterview - QST Ans TelecomSwarna Sekhar Dhar100% (1)
- Fsuipc User GuideDokument54 SeitenFsuipc User GuideKAPTAN XNoch keine Bewertungen
- Clickshare Conference Brochure Digi Version EN PDFDokument11 SeitenClickshare Conference Brochure Digi Version EN PDFBomber BeatNoch keine Bewertungen
- Legends: L-Lecture T - Tutorial/Teacher Guided Theory Practice P - Practical C - Credit, ESE - EndDokument6 SeitenLegends: L-Lecture T - Tutorial/Teacher Guided Theory Practice P - Practical C - Credit, ESE - EndbhattparthivNoch keine Bewertungen
- Programming in Infobasic: ObjectivesDokument22 SeitenProgramming in Infobasic: Objectiveslolitaferoz100% (1)
- Study Informatics at School - WorldwideDokument67 SeitenStudy Informatics at School - WorldwideMauricio Oyanader ArntzNoch keine Bewertungen
- Beep CodesDokument5 SeitenBeep CodesAkibo Tunde Williamson DaviesNoch keine Bewertungen
- Oracle Advisor Webcast: What's New in Financial Reporting 11.1.2.4.900Dokument33 SeitenOracle Advisor Webcast: What's New in Financial Reporting 11.1.2.4.900huyhnNoch keine Bewertungen
- B66273L Vol1Dokument244 SeitenB66273L Vol1sami belkhiria100% (1)
- The Magic Cafe Forums - Forcing A TimeDokument4 SeitenThe Magic Cafe Forums - Forcing A TimeHendri AlamNoch keine Bewertungen
- Simple 1.5-V Boost Converter For MSP430 - Slaa105Dokument7 SeitenSimple 1.5-V Boost Converter For MSP430 - Slaa105Daniel ZancoNoch keine Bewertungen
- Manual 903 H2SDokument145 SeitenManual 903 H2SEduardo MontrealNoch keine Bewertungen
- Steps To Be Followed Bde Stuck CostDokument8 SeitenSteps To Be Followed Bde Stuck CostBSP Industrial TadersNoch keine Bewertungen
- Airpods Pro QSGDokument2 SeitenAirpods Pro QSGAndrés M. Argüelles LandínezNoch keine Bewertungen
- MSC AerospaceDokument4 SeitenMSC AerospaceskhurramqNoch keine Bewertungen
- Congratulations! Your Booking Is Now ConfirmedDokument6 SeitenCongratulations! Your Booking Is Now ConfirmedTufail AibaniNoch keine Bewertungen
- Lenovo H50 TowerDokument3 SeitenLenovo H50 TowerMontegoryNoch keine Bewertungen
- Philips hts3610-12-51 SMDokument37 SeitenPhilips hts3610-12-51 SMNicoleta GhermanNoch keine Bewertungen
- Devashish Kapadnis ResumeDokument1 SeiteDevashish Kapadnis ResumeShubham MeshramNoch keine Bewertungen
- Practical Iot With Raspberry Pi: Module2. Introduction To Python LanguageDokument14 SeitenPractical Iot With Raspberry Pi: Module2. Introduction To Python LanguageHansel de LeonNoch keine Bewertungen
- 6 Matrix Chain M UltiplicationDokument19 Seiten6 Matrix Chain M UltiplicationArslan Ahmed DanishNoch keine Bewertungen
- Mother BoardDokument29 SeitenMother BoardSwayamprakash PatelNoch keine Bewertungen
- OPA380 OPA2380: Features DescriptionDokument23 SeitenOPA380 OPA2380: Features DescriptionSunny SharmaNoch keine Bewertungen
- Templates in Text and Chat - 327d21 PDFDokument3 SeitenTemplates in Text and Chat - 327d21 PDFKRYSTEL WENDY LAHOMNoch keine Bewertungen
- Denon Avr-X3100w Ver.6Dokument217 SeitenDenon Avr-X3100w Ver.6boroda2410Noch keine Bewertungen
- Original Emmc Log Samsung p3100Dokument1 SeiteOriginal Emmc Log Samsung p3100Aan RamadhanNoch keine Bewertungen
- Numark Mixtrack: (NKC4) Service ManualDokument21 SeitenNumark Mixtrack: (NKC4) Service ManualjoseNoch keine Bewertungen
- Mand Line 2nd Edition WWW EBooksWorld IrDokument505 SeitenMand Line 2nd Edition WWW EBooksWorld IrAhmed Alzahrani100% (2)
- CLOUD COMPUTING LAB MANUAL V SemesterDokument63 SeitenCLOUD COMPUTING LAB MANUAL V Semesternk1982632Noch keine Bewertungen