Das könnte Ihnen auch gefallen
- Influencia de La Estructura Del Macizo Rocoso en Excavaciones MinerasDokument5 SeitenInfluencia de La Estructura Del Macizo Rocoso en Excavaciones MinerasRichard Contreras HuamanyalliNoch keine Bewertungen
- Exposicion Tipos Anclaje PDFDokument21 SeitenExposicion Tipos Anclaje PDFSotBel GiaNoch keine Bewertungen
- Estabilización en Rocas Débiles PDFDokument61 SeitenEstabilización en Rocas Débiles PDFSotBel GiaNoch keine Bewertungen
- Diapositivas Geologia de MinasDokument93 SeitenDiapositivas Geologia de MinasSotBel GiaNoch keine Bewertungen
- GEOESTADISTICA (Perfiles)Dokument14 SeitenGEOESTADISTICA (Perfiles)Rosember Romero AcuñaNoch keine Bewertungen
- Curso de CostosDokument20 SeitenCurso de CostosEnmanuel Nazareth Valdiviezo GamboaNoch keine Bewertungen
- Open Pit de La Facultad de Ingenieria de MinasDokument89 SeitenOpen Pit de La Facultad de Ingenieria de MinasAlex W. ConDex100% (3)
- Ventilacion de Minas Pablo Jimenez Ascanio PDFDokument38 SeitenVentilacion de Minas Pablo Jimenez Ascanio PDFGian CaRlo RosaLes67% (6)
- Cap 3 Estabilización de Rocas FracturadasDokument28 SeitenCap 3 Estabilización de Rocas FracturadasSotBel GiaNoch keine Bewertungen
- DS 014 92 emDokument106 SeitenDS 014 92 emArdeniss AlisNoch keine Bewertungen
- Caracterización de Macizos RocososDokument14 SeitenCaracterización de Macizos RocososDiana PaulinaNoch keine Bewertungen
- Metodos Sostenimiento de Tuneles Diego JDokument2 SeitenMetodos Sostenimiento de Tuneles Diego JSotBel GiaNoch keine Bewertungen
- Cap 3 Estabilización de Rocas FracturadasDokument53 SeitenCap 3 Estabilización de Rocas FracturadasdantechavezNoch keine Bewertungen
- Etapas Proyecto Minero.Dokument44 SeitenEtapas Proyecto Minero.Mauricio Alejandro Hernandez VasquezNoch keine Bewertungen
- Mecanica de FluidosDokument47 SeitenMecanica de FluidosSotBel GiaNoch keine Bewertungen
- ParagénesisDokument4 SeitenParagénesisSotBel GiaNoch keine Bewertungen
- Efluentes MinerosDokument5 SeitenEfluentes Minerosyema cra100% (4)
- Explosivos Tipos y PropiedadesDokument44 SeitenExplosivos Tipos y PropiedadesSotBel GiaNoch keine Bewertungen
- Trabajo N2 Analisis de Sistemas MinerosDokument45 SeitenTrabajo N2 Analisis de Sistemas MinerosSotBel GiaNoch keine Bewertungen
- Grupos de MRDokument3 SeitenGrupos de MRWil MLNoch keine Bewertungen
- MI4060Dokument57 SeitenMI4060Daniel SumireNoch keine Bewertungen
- Minado Por Crateres Verticales en RetrocesoDokument32 SeitenMinado Por Crateres Verticales en RetrocesoSotBel GiaNoch keine Bewertungen
- Explosivos GelatinososDokument1 SeiteExplosivos GelatinososSotBel GiaNoch keine Bewertungen
- Perforacion y Voladura Gelignita 1Dokument15 SeitenPerforacion y Voladura Gelignita 1SotBel GiaNoch keine Bewertungen
- Círculo de MohrDokument10 SeitenCírculo de MohrSotBel GiaNoch keine Bewertungen
- Fisica Sem 10Dokument4 SeitenFisica Sem 10SotBel GiaNoch keine Bewertungen
- Modelo Matematico de AshDokument45 SeitenModelo Matematico de Ashsam100% (16)
- Trabajo 1 Res MatDokument6 SeitenTrabajo 1 Res MatSotBel GiaNoch keine Bewertungen
- Trabajo 1 Res MatDokument6 SeitenTrabajo 1 Res MatSotBel GiaNoch keine Bewertungen
- Primera Unidad MaterialesDokument37 SeitenPrimera Unidad MaterialesSotBel GiaNoch keine Bewertungen
- Avila Fernández María AlexandraDokument139 SeitenAvila Fernández María AlexandraANNA GABRIELA NAVARRETE CEDEÑONoch keine Bewertungen
- Egi-F-47 Preoperacional CompresorDokument1 SeiteEgi-F-47 Preoperacional CompresorMARIBELL CAMACHONoch keine Bewertungen
- Evaluacion Final Maquinaria MineraDokument8 SeitenEvaluacion Final Maquinaria MineraBrayan ERNoch keine Bewertungen
- Planificacion de Clase XXXDokument2 SeitenPlanificacion de Clase XXXesterNoch keine Bewertungen
- CedearstalksDokument1 SeiteCedearstalksJyanNoch keine Bewertungen
- Udemy - Curso Microsoft Excel Básico (Ver. 2019)Dokument7 SeitenUdemy - Curso Microsoft Excel Básico (Ver. 2019)martin_aguilar_6Noch keine Bewertungen
- Proyecto Steam5Dokument5 SeitenProyecto Steam5Domi TipazNoch keine Bewertungen
- OREPro 3DDokument2 SeitenOREPro 3DMartin ArocutipNoch keine Bewertungen
- Tareas EpiiDokument4 SeitenTareas EpiiErick JamaNoch keine Bewertungen
- Examen - MANUAL DEL OPERADOR INFORMATICODokument48 SeitenExamen - MANUAL DEL OPERADOR INFORMATICOKristian Jhonatan Schutt CastañedaNoch keine Bewertungen
- Curiosidades Sobre Los Sistemas OperativosDokument4 SeitenCuriosidades Sobre Los Sistemas OperativosOswaldo FraireNoch keine Bewertungen
- Panel View 1Dokument10 SeitenPanel View 1Gerardo HdezNoch keine Bewertungen
- La Imagen Emancipada-John MeloDokument10 SeitenLa Imagen Emancipada-John MeloJohn MeloNoch keine Bewertungen
- LDP$2107Dokument15 SeitenLDP$2107gabrielNoch keine Bewertungen
- 4 Cronograma Maestro - Duración de ActividadesDokument35 Seiten4 Cronograma Maestro - Duración de ActividadesLeiza OyolaNoch keine Bewertungen
- UNIVERSIDAD NACIONAL DE SAN CRISTOBAL DE HUAMANGA TopoDokument4 SeitenUNIVERSIDAD NACIONAL DE SAN CRISTOBAL DE HUAMANGA TopoSadut Pillaca GuillenNoch keine Bewertungen
- Investigacion 1Dokument4 SeitenInvestigacion 12022 Arq RAMOS AGUILAR ALBERTONoch keine Bewertungen
- Firma GNV Cartilla 2Dokument1 SeiteFirma GNV Cartilla 2Lizbeth JaramilloNoch keine Bewertungen
- 72185692C Btwin Es PDFDokument88 Seiten72185692C Btwin Es PDFthomsol97Noch keine Bewertungen
- SOR P1 Sockets TeoriaDokument6 SeitenSOR P1 Sockets Teoria1722885561Noch keine Bewertungen
- Gestion de Stocks y AlmacenesDokument82 SeitenGestion de Stocks y AlmacenesJaime Espinal100% (2)
- WORDDokument6 SeitenWORDItalo GallardoNoch keine Bewertungen
- Archivo 2 PDFDokument17 SeitenArchivo 2 PDFWendy SevillaNoch keine Bewertungen
- Manual HMI (001-100) .En - EsDokument100 SeitenManual HMI (001-100) .En - EsAngel RamosNoch keine Bewertungen
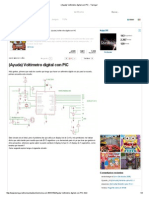
- (Ayuda) Voltimetro Digital Con PIC - Taringa!Dokument3 Seiten(Ayuda) Voltimetro Digital Con PIC - Taringa!Andres CamachoiNoch keine Bewertungen
- Especificaciones AlcantarilladoDokument28 SeitenEspecificaciones AlcantarilladowillianNoch keine Bewertungen
- TN Cosmetologia y Estetica Integral 637303 v102Dokument51 SeitenTN Cosmetologia y Estetica Integral 637303 v102Veruzka Rodriguez GelvezNoch keine Bewertungen
- UntitledDokument135 SeitenUntitledLuis R. ParodiNoch keine Bewertungen
- Limitar La Conexión A Internet en Nuestro Router Por Franjas Horarias - Hijos DigitalesDokument1 SeiteLimitar La Conexión A Internet en Nuestro Router Por Franjas Horarias - Hijos DigitalesLuz SabatrNoch keine Bewertungen
- Informe 1 Ana Patricia YanezDokument6 SeitenInforme 1 Ana Patricia YanezAny YanezNoch keine Bewertungen
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaVon EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaBewertung: 4.5 von 5 Sternen4.5/5 (117)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másVon EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másBewertung: 2.5 von 5 Sternen2.5/5 (3)
- Influencia. La psicología de la persuasiónVon EverandInfluencia. La psicología de la persuasiónBewertung: 4.5 von 5 Sternen4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoVon Everand7 tendencias digitales que cambiarán el mundoBewertung: 4.5 von 5 Sternen4.5/5 (87)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadVon EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadBewertung: 5 von 5 Sternen5/5 (1)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteVon EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteBewertung: 1 von 5 Sternen1/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónVon EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónBewertung: 5 von 5 Sternen5/5 (1)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosVon EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosBewertung: 4 von 5 Sternen4/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Von EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Bewertung: 4 von 5 Sternen4/5 (51)
- La causa raiz de los accidentes: Historias de accidentes en la industriaVon EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaBewertung: 5 von 5 Sternen5/5 (1)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaVon EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Excel 2021 y 365 Paso a Paso: Paso a PasoVon EverandExcel 2021 y 365 Paso a Paso: Paso a PasoBewertung: 5 von 5 Sternen5/5 (12)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainVon EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainNoch keine Bewertungen
- Comunicaciones industriales y WinCCVon EverandComunicaciones industriales y WinCCBewertung: 5 von 5 Sternen5/5 (4)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosVon EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosBewertung: 3.5 von 5 Sternen3.5/5 (7)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasVon EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasBewertung: 4.5 von 5 Sternen4.5/5 (14)
- La psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.Von EverandLa psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.Bewertung: 4.5 von 5 Sternen4.5/5 (3)
- 100 circuitos de shields para arduino (español)Von Everand100 circuitos de shields para arduino (español)Bewertung: 3.5 von 5 Sternen3.5/5 (3)
- La Vida Útil de los Alimentos y sus Principales Reacciones: ¿Qué pasa en los alimentos con el tiempo?Von EverandLa Vida Útil de los Alimentos y sus Principales Reacciones: ¿Qué pasa en los alimentos con el tiempo?Bewertung: 2 von 5 Sternen2/5 (1)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Von EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Bewertung: 4.5 von 5 Sternen4.5/5 (54)
- Inteligencia artificial: Análisis de datos e innovación para principiantesVon EverandInteligencia artificial: Análisis de datos e innovación para principiantesBewertung: 4 von 5 Sternen4/5 (3)
- Perforación con tubería de revestimiento en la construcción del hoyo superficial en campos petrolerosVon EverandPerforación con tubería de revestimiento en la construcción del hoyo superficial en campos petrolerosBewertung: 5 von 5 Sternen5/5 (3)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosVon EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosBewertung: 5 von 5 Sternen5/5 (2)