Das könnte Ihnen auch gefallen
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- Grounding MaterialsDokument32 SeitenGrounding MaterialsSatyaNoch keine Bewertungen
- NIRMA Univ Electrical Power Sys Symmetrical FaultsDokument39 SeitenNIRMA Univ Electrical Power Sys Symmetrical FaultsGunjan lalakiya100% (2)
- Induction CookingDokument13 SeitenInduction CookingMarco Fajardo100% (1)
- Capacitor Selection GuideDokument314 SeitenCapacitor Selection GuideAnney RevathiNoch keine Bewertungen
- Contents:: Introduction Construction Working Principle Comparison of Rotor ReferencesDokument10 SeitenContents:: Introduction Construction Working Principle Comparison of Rotor Referenceskarthikeyan249100% (1)
- General Cable CatalogueDokument193 SeitenGeneral Cable CatalogueRao Panidapu100% (1)
- Atomac & Durco Fully Lined Process Valves and Accessories.: Designed and Produced by The Latest TechnologiesDokument48 SeitenAtomac & Durco Fully Lined Process Valves and Accessories.: Designed and Produced by The Latest Technologieseddie eddNoch keine Bewertungen
- Structure of Electrical Power SystemDokument13 SeitenStructure of Electrical Power SystemBelayneh TadesseNoch keine Bewertungen
- Technical data and specifications for Miniature Circuit Breakers System pro MDokument80 SeitenTechnical data and specifications for Miniature Circuit Breakers System pro MAlexander Moisés Saldaña AcevedoNoch keine Bewertungen
- Application Guide AC Pilot Wire Relaying System SPD and SPA RelaysDokument24 SeitenApplication Guide AC Pilot Wire Relaying System SPD and SPA RelaysSalman SahirNoch keine Bewertungen
- 480 Volt Corner Grounded Delta - Friend or Foe PDFDokument8 Seiten480 Volt Corner Grounded Delta - Friend or Foe PDFRajuNoch keine Bewertungen
- Linear Solenoid GuideDokument20 SeitenLinear Solenoid GuideAndrei ReventNoch keine Bewertungen
- HV Engineering: Generation of High Frequency Ac High Voltage Using Tesla CoilDokument6 SeitenHV Engineering: Generation of High Frequency Ac High Voltage Using Tesla CoilAdnan AliNoch keine Bewertungen
- DC Machines: Parts of DC MachineDokument51 SeitenDC Machines: Parts of DC MachineKUMARNoch keine Bewertungen
- I 6 o 6 NDDokument2 SeitenI 6 o 6 NDFathur RachmanNoch keine Bewertungen
- Project Report EngineeringDokument48 SeitenProject Report EngineeringSonu DhangarNoch keine Bewertungen
- Psoc Course FileDokument14 SeitenPsoc Course Filecholleti sriramNoch keine Bewertungen
- Basic ElecteonicsDokument40 SeitenBasic ElecteonicsShakir RahmaniNoch keine Bewertungen
- Cooper Power Systems - Recloser Guide PDFDokument16 SeitenCooper Power Systems - Recloser Guide PDFAerwin BautistaNoch keine Bewertungen
- Active Power Factor Correction for Single Phase Full Bridge RectifierDokument6 SeitenActive Power Factor Correction for Single Phase Full Bridge RectifierAnand KumarNoch keine Bewertungen
- Underground CablesDokument12 SeitenUnderground Cablesهانى خير100% (2)
- A Hydroponic Garden Design 2004Dokument31 SeitenA Hydroponic Garden Design 2004danimax0070815Noch keine Bewertungen
- WKU ECED Regular CurriculumDokument308 SeitenWKU ECED Regular Curriculumnegasa oliNoch keine Bewertungen
- Nuclear Power Plant: Swami Keshvanand Institute of Technology Management & Gramothan, JaipurDokument27 SeitenNuclear Power Plant: Swami Keshvanand Institute of Technology Management & Gramothan, JaipurNikhil ChopraNoch keine Bewertungen
- Underground Residential Distribution Layouts GuideDokument6 SeitenUnderground Residential Distribution Layouts Guidekash30Noch keine Bewertungen
- Overvoltage Protection and Electrical Insulation TopicsDokument24 SeitenOvervoltage Protection and Electrical Insulation Topicsvenki249Noch keine Bewertungen
- EeeDokument391 SeitenEeeGhulam AbbasNoch keine Bewertungen
- NexansDokument64 SeitenNexansKhalif ElnaddabNoch keine Bewertungen
- SVC Applications: Increase in Steady-State Power-Transfer CapacityDokument21 SeitenSVC Applications: Increase in Steady-State Power-Transfer CapacityChetan KotwalNoch keine Bewertungen
- Assignment IIIDokument2 SeitenAssignment IIIPrasenjit DeyNoch keine Bewertungen
- EE4031 1 LoadflowDokument28 SeitenEE4031 1 LoadflowMuhammad Rizki AlvianNoch keine Bewertungen
- EN ACS800 14 Supplement CDokument124 SeitenEN ACS800 14 Supplement Cmhmod ahmdNoch keine Bewertungen
- Fundamentals of SolenoidDokument9 SeitenFundamentals of SolenoidArun BabuNoch keine Bewertungen
- B8A, RSS ContractDokument209 SeitenB8A, RSS ContractSugandh Dhawan100% (1)
- Mechatronics SyllabusDokument41 SeitenMechatronics SyllabusElstonD'cruzNoch keine Bewertungen
- Lecture - Electrocution and Lightning USJ FinalDokument58 SeitenLecture - Electrocution and Lightning USJ FinalAde Darmawan100% (1)
- DC MOTORS: HOW THEY WORK AS GENERATORS & MOTORSDokument7 SeitenDC MOTORS: HOW THEY WORK AS GENERATORS & MOTORSKelvin LiewNoch keine Bewertungen
- Ee6401 Electrical Machines - IDokument19 SeitenEe6401 Electrical Machines - ISindhujaSindhuNoch keine Bewertungen
- CatalogDokument256 SeitenCatalogenricoNoch keine Bewertungen
- Induction Motor Drive Control MethodsDokument8 SeitenInduction Motor Drive Control MethodsRudra Kumar MishraNoch keine Bewertungen
- Basics of Electrical Machine DesignDokument7 SeitenBasics of Electrical Machine DesignvirenpandyaNoch keine Bewertungen
- GTU B.E. Semester VI High Voltage EngineeringDokument3 SeitenGTU B.E. Semester VI High Voltage EngineeringRavi PatelNoch keine Bewertungen
- Terrain Below Ground Drainage Dimensional DataDokument16 SeitenTerrain Below Ground Drainage Dimensional DatamealysrNoch keine Bewertungen
- VK MEHTA One liner MCQsDokument203 SeitenVK MEHTA One liner MCQsFakherNoch keine Bewertungen
- Catalog PDFDokument448 SeitenCatalog PDFykuscuNoch keine Bewertungen
- Energy Efficiency Technical Guide: How To Select and Maintain Contactors For Capacitor Banks?Dokument16 SeitenEnergy Efficiency Technical Guide: How To Select and Maintain Contactors For Capacitor Banks?SorinDanielMoisaNoch keine Bewertungen
- Basics and Working of AC Motors & Basics of Power GeneratorDokument37 SeitenBasics and Working of AC Motors & Basics of Power GeneratorYasir ShaikhNoch keine Bewertungen
- Transformers: Understanding the Heart of AC Power SystemsDokument28 SeitenTransformers: Understanding the Heart of AC Power SystemsGirish Shankar MishraNoch keine Bewertungen
- Timing Screw FundamentalsDokument6 SeitenTiming Screw FundamentalsAdrian NaranjoNoch keine Bewertungen
- Iugaza Tom2012 - CH1-5 PDFDokument95 SeitenIugaza Tom2012 - CH1-5 PDFaaima malikNoch keine Bewertungen
- EEE8155 Design and Analysis of Electrical Machines and DrivesDokument13 SeitenEEE8155 Design and Analysis of Electrical Machines and DrivesstephenNoch keine Bewertungen
- Industrial AC Machines DOL StarterDokument20 SeitenIndustrial AC Machines DOL Starterhrishikesh barveNoch keine Bewertungen
- LoneStar CatalogDokument100 SeitenLoneStar Catalogmarckleinmann33% (3)
- EE296 Lightning Overvoltage Simulation of Wind FarmDokument30 SeitenEE296 Lightning Overvoltage Simulation of Wind FarmPaolo Josemari ZafraNoch keine Bewertungen
- Transformers and Induction MachinesDokument157 SeitenTransformers and Induction Machinesanil1216kumar100% (3)
- Electrical Overstress (EOS): Devices, Circuits and SystemsVon EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNoch keine Bewertungen
- Grid Converters for Photovoltaic and Wind Power SystemsVon EverandGrid Converters for Photovoltaic and Wind Power SystemsBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Lecture5-Transformator 1 PDFDokument31 SeitenLecture5-Transformator 1 PDFaswardiNoch keine Bewertungen
- Modul 11 Mesin Listrik 11 PDFDokument33 SeitenModul 11 Mesin Listrik 11 PDFaswardiNoch keine Bewertungen
- Lecture6-Transformator 2 PDFDokument33 SeitenLecture6-Transformator 2 PDFaswardiNoch keine Bewertungen
- Education-3-8-7.pdf, EVALUATION MODEL PDFDokument6 SeitenEducation-3-8-7.pdf, EVALUATION MODEL PDFaswardiNoch keine Bewertungen
- Ind Generator0 PDFDokument8 SeitenInd Generator0 PDFaswardiNoch keine Bewertungen
- 2730Dokument20 Seiten2730aswardiNoch keine Bewertungen
- Gambar Pa Bonar PDFDokument3 SeitenGambar Pa Bonar PDFaswardiNoch keine Bewertungen
- DC Motor PDFDokument18 SeitenDC Motor PDFaswardiNoch keine Bewertungen
- Part Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisDokument6 SeitenPart Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisIjabiNoch keine Bewertungen
- Induction Machines - Asynchronous MachinesDokument43 SeitenInduction Machines - Asynchronous MachinesMustafa ÖzdemirNoch keine Bewertungen
- 7 - Lecture - Induction MotorsDokument41 Seiten7 - Lecture - Induction MotorspaurushgodharNoch keine Bewertungen
- Ac DrivesDokument36 SeitenAc Drivesaswardi50% (2)
- 3605304Dokument2 Seiten3605304Madarwi Sarwa100% (2)
- 3605304Dokument2 Seiten3605304Madarwi Sarwa100% (2)
- Motor 10Dokument54 SeitenMotor 10Rajeev BothraNoch keine Bewertungen
- Motor 10Dokument54 SeitenMotor 10Rajeev BothraNoch keine Bewertungen
- Firing Circuit Using Cosine Wave Scheme PDFDokument1 SeiteFiring Circuit Using Cosine Wave Scheme PDFaswardiNoch keine Bewertungen
- Bimtek 00Dokument17 SeitenBimtek 00aswardiNoch keine Bewertungen
- Three-Phase Induction MotorDokument10 SeitenThree-Phase Induction MotorMadarwi SarwaNoch keine Bewertungen
- K&H Em-3360-3a PDFDokument2 SeitenK&H Em-3360-3a PDFaswardiNoch keine Bewertungen
- Induction MotorDokument59 SeitenInduction MotorAkama Kulasekara100% (3)
- Firing Circuit Using Ramp Comparator Scheme PDFDokument1 SeiteFiring Circuit Using Ramp Comparator Scheme PDFaswardiNoch keine Bewertungen
- Firing Circuit Using Op Amps and Gates PDFDokument1 SeiteFiring Circuit Using Op Amps and Gates PDFaswardiNoch keine Bewertungen
- Induction Motor BasicsDokument48 SeitenInduction Motor BasicsIjabiNoch keine Bewertungen
- AC Induction Motor FundamentalsDokument24 SeitenAC Induction Motor Fundamentalsrohtahir100% (3)
- Forced Commutated Circuits PDFDokument1 SeiteForced Commutated Circuits PDFaswardiNoch keine Bewertungen
- AC Induction Motor FundamentalsDokument24 SeitenAC Induction Motor Fundamentalsrohtahir100% (3)
- Electrical Machine Trainer PDFDokument4 SeitenElectrical Machine Trainer PDFaswardiNoch keine Bewertungen
- D C To A C Inverter Input 12v DC 80ah Output 230vac 40w PDFDokument1 SeiteD C To A C Inverter Input 12v DC 80ah Output 230vac 40w PDFaswardiNoch keine Bewertungen
- Group 2 Ac Motors Technical ReportDokument12 SeitenGroup 2 Ac Motors Technical Reporttristan jeff bautistaNoch keine Bewertungen
- Electrical Machines II - Unit 11 - Week 8Dokument3 SeitenElectrical Machines II - Unit 11 - Week 8Prathap VuyyuruNoch keine Bewertungen
- Gujarat Technological UniversityDokument1 SeiteGujarat Technological UniversityKeval PatelNoch keine Bewertungen
- Solucionario Practica 4Dokument22 SeitenSolucionario Practica 4Dolores RachelNoch keine Bewertungen
- Magnet Skew in Cogging Torque Minimization of Axial Gap Permanent Magnet MotorsDokument6 SeitenMagnet Skew in Cogging Torque Minimization of Axial Gap Permanent Magnet MotorsaugustoNoch keine Bewertungen
- Starting of DC MotorDokument7 SeitenStarting of DC Motorabbas bilalNoch keine Bewertungen
- Everything You Need to Know About Brushless DC MotorsDokument14 SeitenEverything You Need to Know About Brushless DC Motorsir_yusriNoch keine Bewertungen
- probsetII AC MACHINESDokument1 SeiteprobsetII AC MACHINESkimbenedictaguilar19Noch keine Bewertungen
- Part-2c Induction Motors - Basic-1Dokument32 SeitenPart-2c Induction Motors - Basic-1eliasNoch keine Bewertungen
- Chapter 23 Three-Phase Induction MotorsDokument9 SeitenChapter 23 Three-Phase Induction MotorsisitestersNoch keine Bewertungen
- DC Motors and Stepper Motors Used As ActuatorsDokument13 SeitenDC Motors and Stepper Motors Used As ActuatorsDươngVănTrọngNoch keine Bewertungen
- Gujarat Technological UniversityDokument1 SeiteGujarat Technological Universityyicef37689Noch keine Bewertungen
- Reluctance Synchronous Motors HendershotDokument31 SeitenReluctance Synchronous Motors HendershotLatisha CarterNoch keine Bewertungen
- Starting System 2Dokument5 SeitenStarting System 2Gthulasi78Noch keine Bewertungen
- Squirrel Cage Induction MotorDokument2 SeitenSquirrel Cage Induction MotorAbhinav KhandekarNoch keine Bewertungen
- DC Motors Advantages and Disadvantages Over AC MotorsDokument9 SeitenDC Motors Advantages and Disadvantages Over AC MotorsAnonymous 22VivgHlNoch keine Bewertungen
- DC Motors Edrolo Study Notes AnnotatedDokument27 SeitenDC Motors Edrolo Study Notes AnnotatedDhyey PatelNoch keine Bewertungen
- Learn about AC motors used in aerospace with this guideDokument16 SeitenLearn about AC motors used in aerospace with this guide4587560Noch keine Bewertungen
- Differentially Compounded DC Motor Speed and Torque AnalysisDokument4 SeitenDifferentially Compounded DC Motor Speed and Torque Analysislucas campos barcelosNoch keine Bewertungen
- Internal PresentationDokument34 SeitenInternal PresentationaakifNoch keine Bewertungen
- 130904-3 Gtu 3rd Sem PaperDokument3 Seiten130904-3 Gtu 3rd Sem PaperShailesh SankdasariyaNoch keine Bewertungen
- ATN-M 118 Slipring Alternators Spec SheetDokument4 SeitenATN-M 118 Slipring Alternators Spec SheetOs CarNoch keine Bewertungen
- Speed Control Methods of Three Phase Induction MotorsDokument16 SeitenSpeed Control Methods of Three Phase Induction MotorsArnab ManasNoch keine Bewertungen
- Question Bank 3150910 Emi IDokument3 SeitenQuestion Bank 3150910 Emi IHardik NakraniNoch keine Bewertungen
- Question Bank-EE 401 Type 1 - Multiple Choice Questions: Page 1 of 13Dokument43 SeitenQuestion Bank-EE 401 Type 1 - Multiple Choice Questions: Page 1 of 13Rishabh KaliaNoch keine Bewertungen
- Assignment 1: Electrical Machines-Ii (Elpc402)Dokument1 SeiteAssignment 1: Electrical Machines-Ii (Elpc402)Abishek BhardwajNoch keine Bewertungen
- FrederiksenDokument1 SeiteFrederiksenHervickly Jeyrel LulehNoch keine Bewertungen
- 13.induction GeneratorsDokument4 Seiten13.induction Generatorsstruggle4418Noch keine Bewertungen
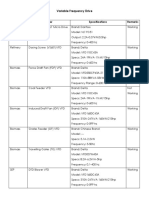
- Variable Frequency DriveDokument2 SeitenVariable Frequency Driveloreen regtanNoch keine Bewertungen