Das könnte Ihnen auch gefallen
- Chapter 1: Introduction To Process Control: at The End of Today's Lecture, You Will Understand The FollowingDokument35 SeitenChapter 1: Introduction To Process Control: at The End of Today's Lecture, You Will Understand The FollowingaliNoch keine Bewertungen
- Introduction To Process ControlDokument29 SeitenIntroduction To Process ControlSalih Ahmed ObeidNoch keine Bewertungen
- Introduction To Process ControlDokument28 SeitenIntroduction To Process ControlFajar AdityadarmaNoch keine Bewertungen
- Introduction To Process ControlDokument30 SeitenIntroduction To Process ControlnadyahginiceNoch keine Bewertungen
- Process Control NotesDokument30 SeitenProcess Control NotesRyle ArbonNoch keine Bewertungen
- Introduction To Process ControlDokument16 SeitenIntroduction To Process Control李承家Noch keine Bewertungen
- Process Dynamics and Control Chapter - 1Dokument44 SeitenProcess Dynamics and Control Chapter - 1MustafaNoch keine Bewertungen
- Chapter - 1 - Introduction To Process ControlDokument40 SeitenChapter - 1 - Introduction To Process ControlSuraya JohariNoch keine Bewertungen
- Chapter 1Dokument17 SeitenChapter 1Ahmed Hassan RashedNoch keine Bewertungen
- Process Dynamics and Control - IntroductionDokument35 SeitenProcess Dynamics and Control - IntroductionMarie Angeline BautistaNoch keine Bewertungen
- Process ControlDokument20 SeitenProcess Controlgongweejie100% (1)
- Chapter 1Dokument102 SeitenChapter 1Anonymous EBReO8vNoch keine Bewertungen
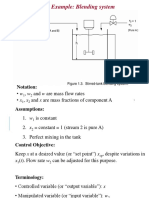
- Lec 2 ExampleDokument9 SeitenLec 2 ExamplemmNoch keine Bewertungen
- Process Control IntroDokument21 SeitenProcess Control Introحاتم غيدان خلفNoch keine Bewertungen
- Chapter 1Dokument27 SeitenChapter 1Izzat FakhriNoch keine Bewertungen
- l1c1 PC TMR Fall23Dokument28 Seitenl1c1 PC TMR Fall23zubairnaeem 92Noch keine Bewertungen
- Chapter 1Dokument30 SeitenChapter 1julior87Noch keine Bewertungen
- Seborg Process Control Chapter 1Dokument50 SeitenSeborg Process Control Chapter 1Tanvir AhmedNoch keine Bewertungen
- HCHE 322 Lecture 1 - IntroductionDokument8 SeitenHCHE 322 Lecture 1 - IntroductionBrian MasauliNoch keine Bewertungen
- ENCH 442: Chemical Process Control and SafetyDokument16 SeitenENCH 442: Chemical Process Control and SafetyCharlie CB PortnerNoch keine Bewertungen
- Lecture-5 - Classification of Process Variables - Control StrategiesDokument18 SeitenLecture-5 - Classification of Process Variables - Control StrategiesKshitij SoniNoch keine Bewertungen
- Class Rules: CENG 4120: Process Dynamics and ControlDokument14 SeitenClass Rules: CENG 4120: Process Dynamics and ControlIvan ChanNoch keine Bewertungen
- Pages From AV15 - L9-4Dokument1 SeitePages From AV15 - L9-4msNoch keine Bewertungen
- Introduction To Chemical Process Dynamics and Control: Dr. Farooq AhmadDokument44 SeitenIntroduction To Chemical Process Dynamics and Control: Dr. Farooq AhmadAhmadJaffarGulfarazNoch keine Bewertungen
- Multi Variable ControlsDokument17 SeitenMulti Variable ControlsJivashiniBalasupurManiamNoch keine Bewertungen
- Introduction To Process ControlDokument48 SeitenIntroduction To Process ControlYi Ling GohNoch keine Bewertungen
- Lesson Plan: S.N Date Planne D Topic Date Engage D Remark SDokument28 SeitenLesson Plan: S.N Date Planne D Topic Date Engage D Remark SVARUN B MNoch keine Bewertungen
- Feed-Forward and Ratio Control: CHME 624 Advance Process Dynamic Modelling & ControlDokument13 SeitenFeed-Forward and Ratio Control: CHME 624 Advance Process Dynamic Modelling & Controlali aljifriNoch keine Bewertungen
- Unit 5 Overview of Control System DesignDokument17 SeitenUnit 5 Overview of Control System DesignBra Sello RMNoch keine Bewertungen
- Ijcst 2016 Wahid-ErwinDokument18 SeitenIjcst 2016 Wahid-ErwinerwinfsNoch keine Bewertungen
- Lecture-4 - MIMO-SISO - Process VariablesDokument16 SeitenLecture-4 - MIMO-SISO - Process VariablesKshitij SoniNoch keine Bewertungen
- Controller Tuning: Dr. Nagajyothi VirivintiDokument23 SeitenController Tuning: Dr. Nagajyothi VirivintiNagajyothiVirivintiNoch keine Bewertungen
- ChE 391 MPCDokument40 SeitenChE 391 MPCRaja BalanNoch keine Bewertungen
- Lecture-6 - Control Stratefgies-Steps in Design of Control SystemDokument24 SeitenLecture-6 - Control Stratefgies-Steps in Design of Control SystemKshitij SoniNoch keine Bewertungen
- DCsummary 1Dokument5 SeitenDCsummary 1khin muyar ayeNoch keine Bewertungen
- Designing Controls For The Process Industries 1st Seames Solution ManualDokument11 SeitenDesigning Controls For The Process Industries 1st Seames Solution Manualemilymurphyyxcesaopbz100% (36)
- Designing Controls For The Process Industries 1st Seames Solution ManualDokument36 SeitenDesigning Controls For The Process Industries 1st Seames Solution Manualunlimberwisdomhn3scy100% (34)
- Dynamics. Openloop Closedloop: ZyxwvutsrqponmlkjihgfedcbazyxwvutsrqponmlkjihgfedcbaDokument4 SeitenDynamics. Openloop Closedloop: ZyxwvutsrqponmlkjihgfedcbazyxwvutsrqponmlkjihgfedcbalordyNoch keine Bewertungen
- Multiloop and Multivariable Control PDFDokument43 SeitenMultiloop and Multivariable Control PDFVaibhav AhujaNoch keine Bewertungen
- Expi Psych Chap 11-13Dokument7 SeitenExpi Psych Chap 11-13Morish Roi YacasNoch keine Bewertungen
- 2018-2019 Process Dynamic and Control (Covenant University)Dokument108 Seiten2018-2019 Process Dynamic and Control (Covenant University)ElijahNoch keine Bewertungen
- Control Systems Week 1Dokument67 SeitenControl Systems Week 1Mahmoud AliNoch keine Bewertungen
- Control Inrtroduction ADokument48 SeitenControl Inrtroduction Arhm 018Noch keine Bewertungen
- Introduction To Process Instrumentation & ControlDokument44 SeitenIntroduction To Process Instrumentation & ControlMasrihan Abu HasanNoch keine Bewertungen
- PC Lessons On Process ControlDokument156 SeitenPC Lessons On Process ControlNsidibe Michael EtimNoch keine Bewertungen
- Process Control Instrumentation Technology 8th EdDokument62 SeitenProcess Control Instrumentation Technology 8th EdSaeed AshaNoch keine Bewertungen
- 296 39 Solutions Instructor Manual 1 Introduction Process Control Chapter 1Dokument2 Seiten296 39 Solutions Instructor Manual 1 Introduction Process Control Chapter 1Lav Kumar Yadav0% (1)
- Savana Process Control PDFDokument183 SeitenSavana Process Control PDFSharon Yanireth Castro PaganNoch keine Bewertungen
- Pres06 MNG512 (111 - 112) Control ActionsDokument37 SeitenPres06 MNG512 (111 - 112) Control ActionsMahmudul HasanNoch keine Bewertungen
- IPC Week 1 19022024 113005amDokument45 SeitenIPC Week 1 19022024 113005amfatmanasir284Noch keine Bewertungen
- Chapter 13Dokument16 SeitenChapter 13李承家Noch keine Bewertungen
- Full Download Designing Controls For The Process Industries 1st Seames Solution Manual PDF Full ChapterDokument36 SeitenFull Download Designing Controls For The Process Industries 1st Seames Solution Manual PDF Full Chapterhennerygoldintn670100% (17)
- Chemical Process Variables-1Dokument48 SeitenChemical Process Variables-1NARE EDMUNDNoch keine Bewertungen
- Process Dynamics & Control: TextbookDokument16 SeitenProcess Dynamics & Control: TextbookMohammed FaiqNoch keine Bewertungen
- Workshop 2 Feedback Control Loop Concepts: Prior To Attempting This Workshop, You Should Review Chapter 3 in The BookDokument5 SeitenWorkshop 2 Feedback Control Loop Concepts: Prior To Attempting This Workshop, You Should Review Chapter 3 in The Bookshashikant0288Noch keine Bewertungen
- PClesson 01 IntroDokument4 SeitenPClesson 01 IntroBhabanirajasNoch keine Bewertungen
- Lec02 Math Foundation1Dokument5 SeitenLec02 Math Foundation1Adit 0110Noch keine Bewertungen
- APC CH5202 Midsem Key 20102021Dokument18 SeitenAPC CH5202 Midsem Key 20102021Tapasya DangiNoch keine Bewertungen
- Chap - 1 - Static Optimization - 1.1 - 2014Dokument57 SeitenChap - 1 - Static Optimization - 1.1 - 2014Asma FarooqNoch keine Bewertungen
- Robust Industrial Control Systems: Optimal Design Approach for Polynomial SystemsVon EverandRobust Industrial Control Systems: Optimal Design Approach for Polynomial SystemsNoch keine Bewertungen
- Waste Water Treatment Using IXDokument3 SeitenWaste Water Treatment Using IXaaaNoch keine Bewertungen
- Liquid-Liquid Equilibrium: Ternary SystemDokument29 SeitenLiquid-Liquid Equilibrium: Ternary SystemaaaNoch keine Bewertungen
- Liquid-Liquid Equilibrium: Ternary SystemDokument29 SeitenLiquid-Liquid Equilibrium: Ternary SystemaaaNoch keine Bewertungen
- Chapter 1 The Nature and Organization of Optimization ProblemsDokument36 SeitenChapter 1 The Nature and Organization of Optimization Problemsaaa100% (2)
- Immscible Liquid Liquid ExtractionDokument7 SeitenImmscible Liquid Liquid ExtractionaaaNoch keine Bewertungen
- Liquid-Liquid Extraction: Choice of SolventDokument23 SeitenLiquid-Liquid Extraction: Choice of SolventaaaNoch keine Bewertungen
- Lecture 16Dokument18 SeitenLecture 16aaaNoch keine Bewertungen
- Chapter 1management10theditionbyrobbinsandcoulter 130822064132 Phpapp02Dokument27 SeitenChapter 1management10theditionbyrobbinsandcoulter 130822064132 Phpapp020612001Noch keine Bewertungen
- Sheet 7Dokument1 SeiteSheet 7aaaNoch keine Bewertungen
- Flash Calculation: SeaderDokument24 SeitenFlash Calculation: SeaderaaaNoch keine Bewertungen
- ManagementDokument24 SeitenManagementEvan JonesNoch keine Bewertungen
- Lectures - Mass TransferDokument36 SeitenLectures - Mass TransferaaaNoch keine Bewertungen
- ManagementDokument24 SeitenManagementEvan JonesNoch keine Bewertungen
- Lectures - Mass TransferDokument34 SeitenLectures - Mass TransferaaaNoch keine Bewertungen
- Lectures - Mass TransferDokument24 SeitenLectures - Mass TransferaaaNoch keine Bewertungen
- Chapter 13 PDFDokument22 SeitenChapter 13 PDFaaaNoch keine Bewertungen
- Tutorials ChE314Dokument12 SeitenTutorials ChE314Nagwa MansyNoch keine Bewertungen
- CH 17 AlcoholDokument15 SeitenCH 17 AlcoholaaaNoch keine Bewertungen
- CH 16 - Chemistry of Aromatic CompoundsDokument41 SeitenCH 16 - Chemistry of Aromatic CompoundsaaaNoch keine Bewertungen
- CH 18 - Ethers & EpoxideDokument7 SeitenCH 18 - Ethers & EpoxideaaaNoch keine Bewertungen
- Chapter 10 PDFDokument47 SeitenChapter 10 PDFaaaNoch keine Bewertungen
- Chapter 14 PDFDokument54 SeitenChapter 14 PDFaaa0% (1)
- Chapter 15 PDFDokument21 SeitenChapter 15 PDFaaaNoch keine Bewertungen
- Chapter 16Dokument14 SeitenChapter 16aaaNoch keine Bewertungen
- Chapter 05Dokument26 SeitenChapter 05slee11829% (7)
- Chapter 04 PDFDokument33 SeitenChapter 04 PDFaaaNoch keine Bewertungen
- Chapter 16 PDFDokument14 SeitenChapter 16 PDFaaaNoch keine Bewertungen
- Chapter 6 SBLDokument4 SeitenChapter 6 SBLbrave manNoch keine Bewertungen
- Ficha Tecnica Reflector 2000W Led Lluminacion de Campos de Futbol Estadios Goled Philips Osram Opalux LedDokument5 SeitenFicha Tecnica Reflector 2000W Led Lluminacion de Campos de Futbol Estadios Goled Philips Osram Opalux Ledluis perdigonNoch keine Bewertungen
- Evolis User ManualDokument28 SeitenEvolis User ManualIonmadalin1000Noch keine Bewertungen
- Assignment 4Dokument2 SeitenAssignment 4Komal SinghNoch keine Bewertungen
- Hemo TecaDokument17 SeitenHemo TecaMafer PilcoNoch keine Bewertungen
- Xgenus X-Ray PDFDokument61 SeitenXgenus X-Ray PDFAli NuriNoch keine Bewertungen
- Automatic Control ExercisesDokument183 SeitenAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- Formal Report Expt 5Dokument6 SeitenFormal Report Expt 5AnonymouscatNoch keine Bewertungen
- (AB-ANI) Program SpecificationDokument8 Seiten(AB-ANI) Program SpecificationMycah EvangelistaNoch keine Bewertungen
- COCCIMORPHDokument13 SeitenCOCCIMORPHmiminNoch keine Bewertungen
- Malraux Anti-MemoiresDokument9 SeitenMalraux Anti-MemoiresNevenaRistićNoch keine Bewertungen
- Chess AI: Competing Paradigms For Machine Intelligence: Shiva Maharaj Nick Polson Alex TurkDokument15 SeitenChess AI: Competing Paradigms For Machine Intelligence: Shiva Maharaj Nick Polson Alex TurkDomingo IslasNoch keine Bewertungen
- 9A02505 Electrical Machines-IIIDokument4 Seiten9A02505 Electrical Machines-IIIsivabharathamurthyNoch keine Bewertungen
- Hilfswerk Wien-Salzburg - 11. Meio 2018Dokument9 SeitenHilfswerk Wien-Salzburg - 11. Meio 2018FreieEnergieNoch keine Bewertungen
- Animal Defenses TestDokument3 SeitenAnimal Defenses TestNermine MouallemNoch keine Bewertungen
- Error Code EMR 2Dokument5 SeitenError Code EMR 2Nafrizal SuhendrikNoch keine Bewertungen
- Of Personality Traits of Only and Sibling School Children in BeijingDokument14 SeitenOf Personality Traits of Only and Sibling School Children in BeijingMuhammad Hamza AsgharNoch keine Bewertungen
- Solution PDFDokument20 SeitenSolution PDFVard FarrellNoch keine Bewertungen
- Anaximenes of MiletusDokument4 SeitenAnaximenes of MiletusRosel Gonzalo-AquinoNoch keine Bewertungen
- Thursday / January 2019 Thursday / January 2019Dokument572 SeitenThursday / January 2019 Thursday / January 2019Zie EikinNoch keine Bewertungen
- Building SpecificationsDokument222 SeitenBuilding SpecificationsdinaquaNoch keine Bewertungen
- Exposure: The PhotoreactionDokument16 SeitenExposure: The PhotoreactionGeetha ThiruvengadamNoch keine Bewertungen
- Mecanica MD - AZG-UDokument29 SeitenMecanica MD - AZG-UStefanoViganóNoch keine Bewertungen
- Original Research PapersDokument13 SeitenOriginal Research Papersrikaseo rikaNoch keine Bewertungen
- WebpdfDokument276 SeitenWebpdfprateekvNoch keine Bewertungen
- Theories of PersonalityDokument4 SeitenTheories of PersonalityKeshav JhaNoch keine Bewertungen
- ResumeDokument3 SeitenResumeSaharsh MaheshwariNoch keine Bewertungen
- Cusps: Ramesh 04-Jun-1976 12:30:00 PM Krishnagiri 78:14:0 E, 12:32:0 N Tzone: 5.5 KP (Original) Ayanamsha 23:26:2Dokument1 SeiteCusps: Ramesh 04-Jun-1976 12:30:00 PM Krishnagiri 78:14:0 E, 12:32:0 N Tzone: 5.5 KP (Original) Ayanamsha 23:26:2Suresh NatarajanNoch keine Bewertungen
- Examiners' Report Principal Examiner Feedback January 2018Dokument7 SeitenExaminers' Report Principal Examiner Feedback January 2018WandaNoch keine Bewertungen
- ENGLISH TOEFL Structure (3rd Exercise)Dokument5 SeitenENGLISH TOEFL Structure (3rd Exercise)susannnnnnNoch keine Bewertungen