Das könnte Ihnen auch gefallen
- Linear IC Applications: A Designer's HandbookVon EverandLinear IC Applications: A Designer's HandbookBewertung: 4 von 5 Sternen4/5 (1)
- Chosen Approximates Specific: Hybrid Equivalent Circuit (H-Parameter)Dokument41 SeitenChosen Approximates Specific: Hybrid Equivalent Circuit (H-Parameter)ChunMan SitNoch keine Bewertungen
- Two Port NetworkDokument7 SeitenTwo Port NetworkAzim KhanNoch keine Bewertungen
- Chapter 7 Small Signal Analysis of BJTDokument85 SeitenChapter 7 Small Signal Analysis of BJTshubhankar palNoch keine Bewertungen
- 1.2 Analog Data SignalDokument38 Seiten1.2 Analog Data SignalTran Hoang AnhNoch keine Bewertungen
- Ec II Lab ManualDokument60 SeitenEc II Lab ManualRam Kumar100% (3)
- Unit II - BJT FET Small Signal Analysis and Frequency ResponseDokument22 SeitenUnit II - BJT FET Small Signal Analysis and Frequency ResponseJadhav BhagavatNoch keine Bewertungen
- 9-Small Signal Analysis of AmplifiersDokument51 Seiten9-Small Signal Analysis of AmplifierskaranNoch keine Bewertungen
- Introduction To Op-Amp PDFDokument23 SeitenIntroduction To Op-Amp PDFJeswant TSNoch keine Bewertungen
- Chapter 2:Operational-AmplifierDokument33 SeitenChapter 2:Operational-AmplifierAhmed ShoeebNoch keine Bewertungen
- Operational Amplifiers: Brandon Borm Shelley Nation Chloe MilionDokument33 SeitenOperational Amplifiers: Brandon Borm Shelley Nation Chloe MilionrakibNoch keine Bewertungen
- BJT Small Signal Analysis Lecture 2Dokument52 SeitenBJT Small Signal Analysis Lecture 2Sherwin VasquezNoch keine Bewertungen
- 3 Signal ConditioningDokument38 Seiten3 Signal Conditioningteklaykibrom3Noch keine Bewertungen
- 21LC11.2.1.a.Small Signal Amplifiers - Introduction & Analysis of Amplifier Using H-ParametersDokument10 Seiten21LC11.2.1.a.Small Signal Amplifiers - Introduction & Analysis of Amplifier Using H-ParametersSiranjeevi GnanamNoch keine Bewertungen
- Nptel Digital GsahaDokument743 SeitenNptel Digital GsahaNilesh BaruiNoch keine Bewertungen
- Ec8353-Electron Devices and Circuits: UNIT IIIDokument81 SeitenEc8353-Electron Devices and Circuits: UNIT IIIKarthikeyan DNoch keine Bewertungen
- Ec8353-Electron Devices and Circuits: UNIT IIIDokument81 SeitenEc8353-Electron Devices and Circuits: UNIT IIIKarthikeyan DNoch keine Bewertungen
- Chapter 1 - Circuit Characterization of CMOS CircuitsDokument60 SeitenChapter 1 - Circuit Characterization of CMOS CircuitsYean TernNoch keine Bewertungen
- @6 - OPAMP and ComparatorsDokument223 Seiten@6 - OPAMP and ComparatorsNgọc TrầnNoch keine Bewertungen
- Operational Amplifier: Masramdhani SaputraDokument16 SeitenOperational Amplifier: Masramdhani SaputradanialNoch keine Bewertungen
- CH-4 Signal Conditioning and Conversion1Dokument31 SeitenCH-4 Signal Conditioning and Conversion1dagimawgchew777Noch keine Bewertungen
- Basic Electronics Mod 3 (Operational Amplifier) PDFDokument27 SeitenBasic Electronics Mod 3 (Operational Amplifier) PDFrajuNoch keine Bewertungen
- Frequency Response: Lesson #12 Small Signal Equivalent Circuits For The BJT Section 8.4-8.8Dokument26 SeitenFrequency Response: Lesson #12 Small Signal Equivalent Circuits For The BJT Section 8.4-8.8VarunKaradesaiNoch keine Bewertungen
- Circuits and Electronics Chapter 3 and NotesDokument49 SeitenCircuits and Electronics Chapter 3 and NotesDr. S. DasNoch keine Bewertungen
- OpAmp BWDokument52 SeitenOpAmp BW3dspider100% (1)
- L01 Operational AmplifierDokument27 SeitenL01 Operational AmplifierSylvester Delali DordziNoch keine Bewertungen
- WEEK 5 - CHAPTER 3.pdf Electronic CircuitDokument38 SeitenWEEK 5 - CHAPTER 3.pdf Electronic CircuitChris DannyNoch keine Bewertungen
- Ch8 Op Amp Nonlinear Circuits & FiltersDokument31 SeitenCh8 Op Amp Nonlinear Circuits & FiltersPahala SamosirNoch keine Bewertungen
- Adobe Scan 11 Feb 2024Dokument13 SeitenAdobe Scan 11 Feb 2024ankitbhatt268Noch keine Bewertungen
- Multistage 1pDokument18 SeitenMultistage 1pKhurram SamiNoch keine Bewertungen
- Part IV OpampDokument45 SeitenPart IV OpampKunalNoch keine Bewertungen
- OpampsDokument32 SeitenOpampsghsalma950Noch keine Bewertungen
- Op AmpDokument57 SeitenOp AmpDivyanshu Yadav100% (1)
- Examples of AutobiographiesDokument6 SeitenExamples of Autobiographiesaslam janNoch keine Bewertungen
- W5 Transistor&cb SVDokument38 SeitenW5 Transistor&cb SVizz isalahNoch keine Bewertungen
- 08 BJT Amplifiers - CEDokument46 Seiten08 BJT Amplifiers - CE陳浚維Noch keine Bewertungen
- UNIT-4 Lecture-1: Log, - Anti Log Amplifiers, Analog Multipliers and Their ApplicationsDokument13 SeitenUNIT-4 Lecture-1: Log, - Anti Log Amplifiers, Analog Multipliers and Their ApplicationschiranjibaviNoch keine Bewertungen
- HA17741/PS: General-Purpose Operational Amplifier (Frequency Compensated)Dokument18 SeitenHA17741/PS: General-Purpose Operational Amplifier (Frequency Compensated)Sliman Abo MorahNoch keine Bewertungen
- By Anshuman Shukla October 27th, 2007Dokument27 SeitenBy Anshuman Shukla October 27th, 2007ShikhaNeeraj AggarwalNoch keine Bewertungen
- Operational Amplifier - Kelompok 5 ElDas.Dokument29 SeitenOperational Amplifier - Kelompok 5 ElDas.yudhairawanNoch keine Bewertungen
- Zta 358Dokument7 SeitenZta 358Alexandre Marido de AluguelNoch keine Bewertungen
- Hybrid or H Parameters of Linear Circuit - D&E NotesDokument4 SeitenHybrid or H Parameters of Linear Circuit - D&E NotesMustafa ElmalkyNoch keine Bewertungen
- Ha17741 HiDokument18 SeitenHa17741 HiBurin SapsiriNoch keine Bewertungen
- Design An Amplifier With A Gain of - 10 and Input Resistance of 10k . Ri 10k Av - Rf/Ri - 10 - Rf/10k RF 10 X 10 K 100 KDokument21 SeitenDesign An Amplifier With A Gain of - 10 and Input Resistance of 10k . Ri 10k Av - Rf/Ri - 10 - Rf/10k RF 10 X 10 K 100 KMangaiyarkarasi VengatachalamNoch keine Bewertungen
- Ch5 - AmplifiersDokument149 SeitenCh5 - AmplifiersRaghav AroraNoch keine Bewertungen
- Evaluation of H ParametersDokument5 SeitenEvaluation of H Parameterssarath1993Noch keine Bewertungen
- Edc Unit 5 Small Signal Low Freq BJT ModelsDokument61 SeitenEdc Unit 5 Small Signal Low Freq BJT ModelsSandeep PatilNoch keine Bewertungen
- Transistor Hybrid ModelDokument10 SeitenTransistor Hybrid Modelanon_351826958Noch keine Bewertungen
- 08 Electronics: We Share The KnowledgeDokument8 Seiten08 Electronics: We Share The KnowledgeprinceaboNoch keine Bewertungen
- ADC and DACDokument54 SeitenADC and DACM. D AdarshNoch keine Bewertungen
- AEC Exercise5Dokument6 SeitenAEC Exercise5Mananga destaingNoch keine Bewertungen
- Electron Devices and Circuits: Prepared by Mr.R.Suresh, AP/EEE Ms.S.Karkuzhali, A.P/EeeDokument60 SeitenElectron Devices and Circuits: Prepared by Mr.R.Suresh, AP/EEE Ms.S.Karkuzhali, A.P/Eeevineetha nagahageNoch keine Bewertungen
- Chapter 6 Op AmpDokument14 SeitenChapter 6 Op AmpAbdul RehmanNoch keine Bewertungen
- Ic Op-Amp Ha 17741Dokument19 SeitenIc Op-Amp Ha 17741evhyajahNoch keine Bewertungen
- PROJECT-LOON by JumiDokument35 SeitenPROJECT-LOON by JuminathmanojNoch keine Bewertungen
- 74HC4053Dokument18 Seiten74HC4053Alvaro MedinaNoch keine Bewertungen
- OpAmp F10Dokument32 SeitenOpAmp F10Suguna PriyaNoch keine Bewertungen
- Learning Objectives:: Topic 5.2.2 - Digital To Analogue ConvertersDokument19 SeitenLearning Objectives:: Topic 5.2.2 - Digital To Analogue Convertersquami3quartsNoch keine Bewertungen
- Basic Electronics LabDokument60 SeitenBasic Electronics Labrahulsingle67% (3)
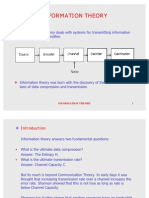
- Communication Theory Deals With Systems For Transmitting Information From One Point To AnotherDokument41 SeitenCommunication Theory Deals With Systems For Transmitting Information From One Point To AnotherrahulsingleNoch keine Bewertungen
- Best Websites List316Dokument51 SeitenBest Websites List316api-3813991Noch keine Bewertungen
- Oily Hair: Rahul GuptaDokument13 SeitenOily Hair: Rahul GuptarahulsingleNoch keine Bewertungen
- Oily Skin: Rahul GuptaDokument11 SeitenOily Skin: Rahul GuptarahulsingleNoch keine Bewertungen
- Rahul Gupta Microcontroller 8051Dokument23 SeitenRahul Gupta Microcontroller 8051rahulsingleNoch keine Bewertungen
- Eeeb273 n01 - Review BJT x6Dokument7 SeitenEeeb273 n01 - Review BJT x6ANazz SzNoch keine Bewertungen
- Analog Circuit AnalysisDokument51 SeitenAnalog Circuit AnalysisvpsampathNoch keine Bewertungen
- Wien Bridge OscillatorDokument5 SeitenWien Bridge OscillatorMarcus DavidssonNoch keine Bewertungen
- Analog ElectronicsDokument36 SeitenAnalog ElectronicsThirumalesh BNoch keine Bewertungen
- EC - Unit 3 - AmplifiersDokument18 SeitenEC - Unit 3 - Amplifiersnanobala15Noch keine Bewertungen
- chp4 - BJT AMPLIFIER - NOTESDokument21 Seitenchp4 - BJT AMPLIFIER - NOTESNaim NizamNoch keine Bewertungen
- Basic Applied Electronics by BalamuruganDokument73 SeitenBasic Applied Electronics by BalamuruganBalamurugan Thirunavukarasu100% (2)
- References: (1) Electronic Circuit Analysis and Design by Donald A. Neaman, Tata Mcgraw-HillDokument30 SeitenReferences: (1) Electronic Circuit Analysis and Design by Donald A. Neaman, Tata Mcgraw-HillPadirikuppam PavithraNoch keine Bewertungen
- TransistorDokument9 SeitenTransistorShafiul Huda ErazNoch keine Bewertungen
- California State University, Long Beach Department of Electrical Engineering EE 430 Analog Electric CircuitsDokument13 SeitenCalifornia State University, Long Beach Department of Electrical Engineering EE 430 Analog Electric CircuitsTuan VoNoch keine Bewertungen
- Chapter 1-Bipolar Junction Transistor (BJT)Dokument78 SeitenChapter 1-Bipolar Junction Transistor (BJT)junaid_usa2002Noch keine Bewertungen
- Features: SN761683B TV Tuner IcDokument21 SeitenFeatures: SN761683B TV Tuner Icami oreverNoch keine Bewertungen
- Ec6304 Electronic Circuits-IDokument193 SeitenEc6304 Electronic Circuits-IIniya Ilakkia100% (1)
- The Transistor AmplifierDokument55 SeitenThe Transistor AmplifierAshish ShrivastavaNoch keine Bewertungen
- Features: TL494 Pulse-Width-Modulation Control CircuitsDokument19 SeitenFeatures: TL494 Pulse-Width-Modulation Control CircuitsEdgarAlonsoNoch keine Bewertungen
- Jntuk r13 - Ece II-II Eca QBDokument17 SeitenJntuk r13 - Ece II-II Eca QBjaganmohanrsNoch keine Bewertungen
- Aec BitsDokument9 SeitenAec BitsComrade Venkata HarshaNoch keine Bewertungen
- Q& A Electronic DevicesDokument39 SeitenQ& A Electronic DevicesMUHAMMED SHAMVILNoch keine Bewertungen
- 13-Chapter 13 - TransistorsDokument28 Seiten13-Chapter 13 - Transistorssrinu247100% (3)
- 6.BJT 6 (CH 8 Electronic Devices and Circuit Theory Robert Boylestad Louis Nashelsky 7th Edition)Dokument46 Seiten6.BJT 6 (CH 8 Electronic Devices and Circuit Theory Robert Boylestad Louis Nashelsky 7th Edition)shilaNoch keine Bewertungen
- BJT IntroductionDokument4 SeitenBJT IntroductionMr KNoch keine Bewertungen
- EE 332 Lab 3Dokument10 SeitenEE 332 Lab 3Nguyễn Văn ThiệnNoch keine Bewertungen
- Common-Collector Amplifier: University of Utah Electrical & Computer Engineering DepartmentDokument5 SeitenCommon-Collector Amplifier: University of Utah Electrical & Computer Engineering DepartmentMalikAlrahabiNoch keine Bewertungen
- Udemy - The Complete Electronics Course 2021 Analog Hardware DesignDokument216 SeitenUdemy - The Complete Electronics Course 2021 Analog Hardware Designjohn maniaNoch keine Bewertungen
- Distortion NPTELDokument58 SeitenDistortion NPTELkijiji userNoch keine Bewertungen
- UGSyllabiEED PDFDokument76 SeitenUGSyllabiEED PDFAlamaskhan PathanNoch keine Bewertungen
- EP Manual Master Final 31-01-11Dokument102 SeitenEP Manual Master Final 31-01-11birenNoch keine Bewertungen
- Electronic Fundamentals: B) The Active ElementDokument45 SeitenElectronic Fundamentals: B) The Active ElementZbor ZborNoch keine Bewertungen
- Important Conclusions and Concepts: BJT SummaryDokument9 SeitenImportant Conclusions and Concepts: BJT SummaryTomashita ArenasNoch keine Bewertungen
- Electronic CircuitsDokument18 SeitenElectronic CircuitsMythily VedhagiriNoch keine Bewertungen