Das könnte Ihnen auch gefallen
- Wind Tunnel Testing of High-Rise BuildingsDokument23 SeitenWind Tunnel Testing of High-Rise BuildingsMarcela FigueiredoNoch keine Bewertungen
- Flutter Prevention CriteriaDokument46 SeitenFlutter Prevention Criteriaffontana100% (1)
- Historical Development of Aircraft FlutterDokument16 SeitenHistorical Development of Aircraft FlutterRodrigo VerganiNoch keine Bewertungen
- Design-and-construction-Tied Arch Bridge PDFDokument64 SeitenDesign-and-construction-Tied Arch Bridge PDFShaileshRastogiNoch keine Bewertungen
- Aeroelastic Siemens PDFDokument602 SeitenAeroelastic Siemens PDFSabanSaulicNoch keine Bewertungen
- Spar Design of A Fokker D-VII - Aerospace Engineering BlogDokument8 SeitenSpar Design of A Fokker D-VII - Aerospace Engineering Blogjohn mtz100% (1)
- (Fluid Mechanics and Its Applications 110) Roelof Vos, Saeed Farokhi (Auth.) - Introduction To Transonic Aerodynamics-Springer Netherlands (2015)Dokument561 Seiten(Fluid Mechanics and Its Applications 110) Roelof Vos, Saeed Farokhi (Auth.) - Introduction To Transonic Aerodynamics-Springer Netherlands (2015)Kunal GargNoch keine Bewertungen
- MSC Aerospace DissertationDokument76 SeitenMSC Aerospace Dissertationanirudh666100% (3)
- Periodic Table of The Finite ElementsDokument1 SeitePeriodic Table of The Finite ElementsJonas RollerNoch keine Bewertungen
- Offshore ANSYSDokument96 SeitenOffshore ANSYSUtkarsh Ramayan100% (2)
- Activated CarbonDokument34 SeitenActivated CarbonSanjeeva YedavalliNoch keine Bewertungen
- NACA Conference On Aircraft Loads 1955Dokument579 SeitenNACA Conference On Aircraft Loads 1955Mark Evan SalutinNoch keine Bewertungen
- 1200 Buildings Program BMS Seminar 1Dokument37 Seiten1200 Buildings Program BMS Seminar 1HayanJanakatNoch keine Bewertungen
- Mechanics of Vibration Formula SheetDokument3 SeitenMechanics of Vibration Formula Sheetshah saadNoch keine Bewertungen
- Gherkin PresentationDokument32 SeitenGherkin Presentationravi ram100% (1)
- Wind Loads On Utility Scale Solar PV Power Plants DBanks 2015Dokument8 SeitenWind Loads On Utility Scale Solar PV Power Plants DBanks 2015Stefan CheungNoch keine Bewertungen
- AAE 556 Aeroelasticity: Lectures 22, 23 Typical Dynamic Instability Problems and Test ReviewDokument26 SeitenAAE 556 Aeroelasticity: Lectures 22, 23 Typical Dynamic Instability Problems and Test Reviewoigres725Noch keine Bewertungen
- Formula RioDokument3 SeitenFormula RioJean Taipe ChavezNoch keine Bewertungen
- Formula RioDokument3 SeitenFormula RioJean Taipe ChavezNoch keine Bewertungen
- Coupled oscillator interactions revealedDokument58 SeitenCoupled oscillator interactions revealedYash RajNoch keine Bewertungen
- 2022 JEE Main 16 SolutionsDokument15 Seiten2022 JEE Main 16 SolutionsHimanshu SinghNoch keine Bewertungen
- OptimDokument23 SeitenOptimMona AliNoch keine Bewertungen
- 4.3 Orthogonal DiagonalizationDokument11 Seiten4.3 Orthogonal DiagonalizationNor adilahNoch keine Bewertungen
- Maths Tutorial 2Dokument8 SeitenMaths Tutorial 2aditya jhaNoch keine Bewertungen
- Table of ValuesDokument3 SeitenTable of ValuesLy ShanNoch keine Bewertungen
- Normal DistributionDokument34 SeitenNormal DistributionRitikaNoch keine Bewertungen
- Useful Inequalities: v0.36 August 10, 2021Dokument3 SeitenUseful Inequalities: v0.36 August 10, 2021jackNoch keine Bewertungen
- Chapter 5 French DB Short Questions PDFDokument7 SeitenChapter 5 French DB Short Questions PDFAman BhatiaNoch keine Bewertungen
- Useful Inequalities: v0.29 June 17, 2017Dokument3 SeitenUseful Inequalities: v0.29 June 17, 2017Antonio NavarreteNoch keine Bewertungen
- Advanced Engineering Mathematics ProblemsDokument9 SeitenAdvanced Engineering Mathematics ProblemspreethiNoch keine Bewertungen
- Tutorial Sheet No 2 MA1201 MO16Dokument9 SeitenTutorial Sheet No 2 MA1201 MO16jacky hansdahNoch keine Bewertungen
- Variance of A Random Sample of Size N: Estimating The Population MeanDokument4 SeitenVariance of A Random Sample of Size N: Estimating The Population MeanRicardo VelozNoch keine Bewertungen
- A. Defenisi: Z Diff. IntgDokument8 SeitenA. Defenisi: Z Diff. IntgNathanNoch keine Bewertungen
- Lecture 5: The Electric Potential and The Method of ImagesDokument12 SeitenLecture 5: The Electric Potential and The Method of Imagessamer saeedNoch keine Bewertungen
- Interval Insights 6thsDokument3 SeitenInterval Insights 6thsPoss HumNoch keine Bewertungen
- STA 342-TH6-Test On Equality of VarianceDokument8 SeitenSTA 342-TH6-Test On Equality of Variancesolomon mwatiNoch keine Bewertungen
- 1.09 Parametric Plotting Literacy: Tfrom0to2Dokument6 Seiten1.09 Parametric Plotting Literacy: Tfrom0to2Sri RaghavanNoch keine Bewertungen
- MCE 302 FEx Q 4 (June 22, 2021)Dokument1 SeiteMCE 302 FEx Q 4 (June 22, 2021)manameisghostNoch keine Bewertungen
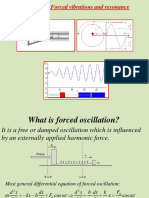
- Forced oscillations and resonanceDokument34 SeitenForced oscillations and resonanceAman BhatiaNoch keine Bewertungen
- Gtr.3 Maestoso Maestoso Maestoso Maestoso: Ludwig Van BeethovenDokument1 SeiteGtr.3 Maestoso Maestoso Maestoso Maestoso: Ludwig Van Beethovenμιχαλης καραγιαννηςNoch keine Bewertungen
- Oracion Trombon PDFDokument1 SeiteOracion Trombon PDFJuan Pablo Bataller AriasNoch keine Bewertungen
- Numerical Analysis I Chapter III - VIDokument38 SeitenNumerical Analysis I Chapter III - VIKidist TaluNoch keine Bewertungen
- One Dimensional Flow With Heat Addition: A Gas Dynamic Model For Cross Country Gas Pipe Lines .Dokument56 SeitenOne Dimensional Flow With Heat Addition: A Gas Dynamic Model For Cross Country Gas Pipe Lines .Paramesh100% (1)
- Jingle Bell Rock Chitarra TabDokument2 SeitenJingle Bell Rock Chitarra TabpaoloNoch keine Bewertungen
- MCQ For Module2Dokument3 SeitenMCQ For Module2Ijaz Talib100% (1)
- Prog Cient 09Dokument7 SeitenProg Cient 09Solange AcuñaNoch keine Bewertungen
- 8.02x Electricity and MagnetismDokument1 Seite8.02x Electricity and MagnetismDiana PonceNoch keine Bewertungen
- PYQ InvertersDokument18 SeitenPYQ Inverters14 Asif AkhtarNoch keine Bewertungen
- N Nhi TìnhDokument5 SeitenN Nhi TìnhkienhttccbtnNoch keine Bewertungen
- Naimononedari TABSDokument2 SeitenNaimononedari TABSallen paradoNoch keine Bewertungen
- Pre-Mock Practice 2Dokument2 SeitenPre-Mock Practice 2Michelle ChungNoch keine Bewertungen
- Hypothesis Test For TWO Population Means: INDEPENDENTDokument13 SeitenHypothesis Test For TWO Population Means: INDEPENDENTnasirhakimiNoch keine Bewertungen
- UCO Engr Stat Formula Sheet 02 Feb 2016Dokument1 SeiteUCO Engr Stat Formula Sheet 02 Feb 2016James Thomas CampNoch keine Bewertungen
- Graphs of FunctionsDokument6 SeitenGraphs of FunctionsSyed Jibran NadirNoch keine Bewertungen
- Math III - Spring Final Exam Review - Logs and ExponentialsDokument4 SeitenMath III - Spring Final Exam Review - Logs and ExponentialsMedan Kota KelahirankuNoch keine Bewertungen
- QB Sol Relative VelocityDokument9 SeitenQB Sol Relative Velocityagrawalayush040Noch keine Bewertungen
- Screenshot 2024-03-22 at 10.38.20 AMDokument82 SeitenScreenshot 2024-03-22 at 10.38.20 AMPhorn DevithNoch keine Bewertungen
- Tetris ThemeDokument2 SeitenTetris ThemeLiliana MadonnaNoch keine Bewertungen
- (Addmath) Skema K2 MRSM Trial 2022Dokument22 Seiten(Addmath) Skema K2 MRSM Trial 2022Christian Qing GeorgyNoch keine Bewertungen
- Bon Jovi - It's My Life guitar chordsDokument2 SeitenBon Jovi - It's My Life guitar chordsWerveson SilvaNoch keine Bewertungen
- Lecture Lattice VectorsDokument13 SeitenLecture Lattice Vectorsatalasa-1Noch keine Bewertungen
- Handout Elliptic Curve CryptoDokument7 SeitenHandout Elliptic Curve Crypto2BL20CS013 Akanksha RudragoudarNoch keine Bewertungen
- Chapter 8 TestDokument8 SeitenChapter 8 TestKloe-Rose LemmonNoch keine Bewertungen
- Document analysis of three systemsDokument2 SeitenDocument analysis of three systemsMichael Alex Velasquez SandovalNoch keine Bewertungen
- Mom EmptDokument2 SeitenMom EmptMichael Alex Velasquez SandovalNoch keine Bewertungen
- Solution of Matrix Eigenvalue Problem: Mike RenfroDokument23 SeitenSolution of Matrix Eigenvalue Problem: Mike RenfroKherfi AbdelhakNoch keine Bewertungen
- Flow below a sluice gate problemDokument8 SeitenFlow below a sluice gate problemعلاء البناءNoch keine Bewertungen
- Signals Analysis tutorialDokument8 SeitenSignals Analysis tutorialsubbarao0916Noch keine Bewertungen
- Advanced Level Problem Solving (ALPS-5) - SolutionDokument19 SeitenAdvanced Level Problem Solving (ALPS-5) - SolutionAyush guptaNoch keine Bewertungen
- Emission of Pollutants To The Atmosphere by Type and Sources, Malaysia, 2000 - 2020Dokument4 SeitenEmission of Pollutants To The Atmosphere by Type and Sources, Malaysia, 2000 - 2020SITI NUR AFIQAH MAHAZANNoch keine Bewertungen
- Course Summary Sheet-1-4Dokument2 SeitenCourse Summary Sheet-1-4محمد معوضNoch keine Bewertungen
- Belimo - P-22RT - 1U00 - Installation-InstructionDokument2 SeitenBelimo - P-22RT - 1U00 - Installation-InstructionAslam Abd AzizNoch keine Bewertungen
- Jingle bell rock-Chitarra_classica_1-Chitarra_classica_1Dokument1 SeiteJingle bell rock-Chitarra_classica_1-Chitarra_classica_1Federico CirulliNoch keine Bewertungen
- Rfid 05Dokument108 SeitenRfid 05C Athithya AshwinNoch keine Bewertungen
- Wing Flutter PDFDokument76 SeitenWing Flutter PDFSI NANoch keine Bewertungen
- Flutter Prediction Using Reduced-Order ModelingDokument16 SeitenFlutter Prediction Using Reduced-Order ModelingTheNoch keine Bewertungen
- Compliance with Flutter RegulationsDokument32 SeitenCompliance with Flutter RegulationsLadislao PazmanyNoch keine Bewertungen
- Björn Isaksen - Design of Hardanger Suspension BridgeDokument36 SeitenBjörn Isaksen - Design of Hardanger Suspension BridgeDemçe FlorjanNoch keine Bewertungen
- Adaptive BarrettDokument12 SeitenAdaptive BarrettAb Imō PectoreNoch keine Bewertungen
- VLAERODokument2 SeitenVLAERORidwan Fadlika100% (1)
- Aerodynamic Characterisation of Rocket F A5fda0b0Dokument5 SeitenAerodynamic Characterisation of Rocket F A5fda0b0SamiNoch keine Bewertungen
- Gallegos - 17 - Flags As Vortex Generators For Heat Transfer Enhancement - HighlightDokument13 SeitenGallegos - 17 - Flags As Vortex Generators For Heat Transfer Enhancement - Highlightfelipecondo92Noch keine Bewertungen
- Aeroelasticity: Dr. Ugur Guven Aerospace Engineer (PHD) Nuclear Science and Technology Engineer (MSC)Dokument57 SeitenAeroelasticity: Dr. Ugur Guven Aerospace Engineer (PHD) Nuclear Science and Technology Engineer (MSC)Pooja SharmaNoch keine Bewertungen
- CFD Analysis of Wind Loads on Steel Box Girders During ConstructionDokument10 SeitenCFD Analysis of Wind Loads on Steel Box Girders During ConstructionMarcoFranchinottiNoch keine Bewertungen
- Wind Code Evaluation Caribbean Islands (Caricom) : Name of Document: Caribbean Uniform Building Code (Cubic)Dokument13 SeitenWind Code Evaluation Caribbean Islands (Caricom) : Name of Document: Caribbean Uniform Building Code (Cubic)Jayant LakhlaniNoch keine Bewertungen
- WMC FOCUS6 Pricelist2013Dokument4 SeitenWMC FOCUS6 Pricelist2013XzildeNoch keine Bewertungen
- JAR-25 Airworthiness Standards for Large AeroplanesDokument35 SeitenJAR-25 Airworthiness Standards for Large AeroplaneserohlNoch keine Bewertungen
- Assignment 10 Aileron Reversal AE676 - Aeroelasticity: Puneet Singh Y8378Dokument15 SeitenAssignment 10 Aileron Reversal AE676 - Aeroelasticity: Puneet Singh Y8378Ezequiel Gerardo Sanchez GranadosNoch keine Bewertungen
- Mil A 8870CDokument52 SeitenMil A 8870CVesa RäisänenNoch keine Bewertungen
- Transonic flutter analysis of rectangular wing using OpenFOAMDokument16 SeitenTransonic flutter analysis of rectangular wing using OpenFOAMFurkan KesimNoch keine Bewertungen
- Recent Evolution of Cable-Stayed Bridges: Michel VirlogeuxDokument19 SeitenRecent Evolution of Cable-Stayed Bridges: Michel VirlogeuxprakharNoch keine Bewertungen
- M.tech Curriculum 0Dokument49 SeitenM.tech Curriculum 0Yash DhabaliaNoch keine Bewertungen
- Rotor Design For Whirl Flutter: An Examination of Options For Improving Tiltrotor Aeroelastic Stability MarginsDokument16 SeitenRotor Design For Whirl Flutter: An Examination of Options For Improving Tiltrotor Aeroelastic Stability MarginsYonghui XUNoch keine Bewertungen