Das könnte Ihnen auch gefallen
- Single-Phase Induction MotorsDokument82 SeitenSingle-Phase Induction MotorsVinay PrakashNoch keine Bewertungen
- Electrical Machines: Lecture Notes for Electrical Machines CourseVon EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNoch keine Bewertungen
- Electrical MachinesDokument82 SeitenElectrical Machinessanthosiyal751Noch keine Bewertungen
- Chapter2 DevicesDokument33 SeitenChapter2 DevicesFrozenTuxNoch keine Bewertungen
- DC Motor PrincipleDokument15 SeitenDC Motor Principlecode scribd100% (1)
- Single Phase Induction Motor and Special Electrical MachinesDokument22 SeitenSingle Phase Induction Motor and Special Electrical MachinesRajesh Babu100% (2)
- A.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryDokument5 SeitenA.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryCønstäh Van Der WüppertälärîanskíhNoch keine Bewertungen
- Speed Control Methods for DC MotorsDokument2 SeitenSpeed Control Methods for DC Motorsmsd183wkNoch keine Bewertungen
- Question and Answer AC MachinesDokument12 SeitenQuestion and Answer AC MachinesVishal SawhNoch keine Bewertungen
- Class One Trade Tests Question: Engineer MangwengweDokument7 SeitenClass One Trade Tests Question: Engineer Mangwengweedward mtakwa100% (1)
- Basic Motor Control GuideDokument17 SeitenBasic Motor Control GuideHeizen BulanNoch keine Bewertungen
- DC Motor ObjectivesDokument13 SeitenDC Motor ObjectivesAvik PoudelNoch keine Bewertungen
- Questions: SpecificationsDokument19 SeitenQuestions: Specificationsedward mtakwa100% (2)
- EE333 Electrical Machines Lab IIDokument2 SeitenEE333 Electrical Machines Lab IIvpzfarisNoch keine Bewertungen
- Electrical Power 1Dokument24 SeitenElectrical Power 1AUWAL ALIYU100% (1)
- DCMTDokument37 SeitenDCMTGloria HolcombNoch keine Bewertungen
- Phasor Representation of ACDokument21 SeitenPhasor Representation of ACKavitha NaikNoch keine Bewertungen
- Advanced Electric Machine TheoryDokument7 SeitenAdvanced Electric Machine TheoryAzemi YakubNoch keine Bewertungen
- Chapter 7 - Data Transmission and TelemetryDokument16 SeitenChapter 7 - Data Transmission and Telemetryjst86Noch keine Bewertungen
- DC GeneratorDokument38 SeitenDC Generatoraswardi8756Noch keine Bewertungen
- ELECTRICAL INSTALLATIONS Task1Dokument7 SeitenELECTRICAL INSTALLATIONS Task1Akmal HazimNoch keine Bewertungen
- Electrical Drives: An Introduction to Power Electronics and Variable Speed AC and DC Motor DrivesDokument37 SeitenElectrical Drives: An Introduction to Power Electronics and Variable Speed AC and DC Motor DrivesDawit Shimeles TesfayeNoch keine Bewertungen
- EET301 2013 Chapter 6Dokument51 SeitenEET301 2013 Chapter 6Lee Boon HongNoch keine Bewertungen
- Industrial Machines IiDokument26 SeitenIndustrial Machines IiIsaac KimaruNoch keine Bewertungen
- Trade Test Class 1Dokument7 SeitenTrade Test Class 1Godfrey MasumbikaNoch keine Bewertungen
- Special Purpose Motors - Large FontsDokument26 SeitenSpecial Purpose Motors - Large FontsAnuradha SkaNoch keine Bewertungen
- Chap1 Special MachinesDokument23 SeitenChap1 Special MachinesHell Maax100% (2)
- AC Motor: From Wikipedia, The Free EncyclopediaDokument9 SeitenAC Motor: From Wikipedia, The Free EncyclopediaiimtpawanNoch keine Bewertungen
- Lecture 7 Three-Phase TransformersDokument4 SeitenLecture 7 Three-Phase TransformersShahrim MohdNoch keine Bewertungen
- Miami Dade College2012 2014 Catalog Tcm6-81161Dokument292 SeitenMiami Dade College2012 2014 Catalog Tcm6-81161brooklynsnowNoch keine Bewertungen
- Special Purpose MotorsDokument16 SeitenSpecial Purpose MotorsHari ReddyNoch keine Bewertungen
- DC Motor S: Anand 08338958770Dokument79 SeitenDC Motor S: Anand 08338958770Rohit AvasthiNoch keine Bewertungen
- Trade Test Questions-1Dokument6 SeitenTrade Test Questions-1Samuel Tafara Manjeni100% (1)
- 360 Topic 6 DC MachineDokument33 Seiten360 Topic 6 DC MachineAchsan ArfandiNoch keine Bewertungen
- Questions & Answers On Efficiency and Voltage RegulationDokument18 SeitenQuestions & Answers On Efficiency and Voltage Regulationkibrom atsbhaNoch keine Bewertungen
- Chapter 1 - Introduction To Machinery PrinciplesDokument51 SeitenChapter 1 - Introduction To Machinery PrinciplesGopinath SubramaniNoch keine Bewertungen
- 100 Most Important 3-Phase Induction Motor MCQ With Explanation 2Dokument13 Seiten100 Most Important 3-Phase Induction Motor MCQ With Explanation 2NaveedNoch keine Bewertungen
- JNTUHOME B.Tech Exam Questions on Basic Electrical and Electronics EngineeringDokument8 SeitenJNTUHOME B.Tech Exam Questions on Basic Electrical and Electronics EngineeringNagendra PrasadNoch keine Bewertungen
- Important MCQ Polyphase Induction MotorsDokument13 SeitenImportant MCQ Polyphase Induction MotorsMarche SebastianNoch keine Bewertungen
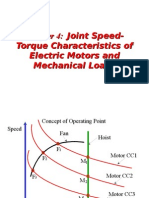
- Joint Speed-Torque Characteristics of Electric Motors and Mechanical LoadsDokument5 SeitenJoint Speed-Torque Characteristics of Electric Motors and Mechanical LoadsFrozenTuxNoch keine Bewertungen
- DC-Choppers Class A B C D EDokument18 SeitenDC-Choppers Class A B C D EAnonymous iTJLpNVNoch keine Bewertungen
- Types of Single Phase Induction MotorDokument12 SeitenTypes of Single Phase Induction Motorkarthikeyan249Noch keine Bewertungen
- Single Line Diagram Definition and MeaningDokument7 SeitenSingle Line Diagram Definition and MeaningMohammad HamamdNoch keine Bewertungen
- Electrical Engg QuestionsDokument8 SeitenElectrical Engg QuestionsRavi SoniNoch keine Bewertungen
- TransformerDokument20 SeitenTransformerKarthikeyanKarunNoch keine Bewertungen
- Power Electronics & Drives: Unit: 1 Power Semiconductor DevicesDokument24 SeitenPower Electronics & Drives: Unit: 1 Power Semiconductor DevicesTapobroto ChatterjeeNoch keine Bewertungen
- Electrical Workshop Practice 1 Eec 116 ND 116 ND 1 CeDokument1 SeiteElectrical Workshop Practice 1 Eec 116 ND 116 ND 1 CeOlaolu OgunsakinNoch keine Bewertungen
- A Report On The "3-Phase Line Fault Detector" Ee344 Minor Project - IDokument34 SeitenA Report On The "3-Phase Line Fault Detector" Ee344 Minor Project - IDhruv PatelNoch keine Bewertungen
- Final Et NotesDokument123 SeitenFinal Et NotesyounusmohamadNoch keine Bewertungen
- Eee Vii Electrical Power Utilization (10ee72) SolutionDokument40 SeitenEee Vii Electrical Power Utilization (10ee72) Solutionanirudh.r.s.100% (1)
- Trade Test Questions 2Dokument20 SeitenTrade Test Questions 2Godfrey Masumbika100% (2)
- No Load Test On Single Phase Induction MotorDokument1 SeiteNo Load Test On Single Phase Induction Motorg3v5Noch keine Bewertungen
- HET 225 HEt 228 Tutorial 3 Solution S2 2014Dokument4 SeitenHET 225 HEt 228 Tutorial 3 Solution S2 2014Ibrahim Hussain0% (1)
- Questions & Answers On Starting of Induction MotorsDokument17 SeitenQuestions & Answers On Starting of Induction Motorskibrom atsbhaNoch keine Bewertungen
- Ch8 DC Machine FundamentalsDokument29 SeitenCh8 DC Machine FundamentalsalpizraNoch keine Bewertungen
- Computer Methods in Power Systems Analysis with MATLABVon EverandComputer Methods in Power Systems Analysis with MATLABNoch keine Bewertungen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- Validation of Frequency Domain Transformation against Time Domain Synchronous Frame RegulatorDokument1 SeiteValidation of Frequency Domain Transformation against Time Domain Synchronous Frame RegulatorFadhil A. HasanNoch keine Bewertungen
- A (S$QD' (S) )Dokument1 SeiteA (S$QD' (S) )Fadhil A. HasanNoch keine Bewertungen
- Frequency Domain Analysis of Three Phase Linear Current RegulatorsDokument1 SeiteFrequency Domain Analysis of Three Phase Linear Current RegulatorsFadhil A. HasanNoch keine Bewertungen
- Digital implementation of resonant current regulator for three-phase systemsDokument1 SeiteDigital implementation of resonant current regulator for three-phase systemsFadhil A. HasanNoch keine Bewertungen
- AC Machine 1Dokument27 SeitenAC Machine 1Fadhil A. Hasan100% (1)
- As As: No CrossDokument1 SeiteAs As: No CrossFadhil A. HasanNoch keine Bewertungen
- Jeas 0519 7762Dokument10 SeitenJeas 0519 7762Fadhil A. HasanNoch keine Bewertungen
- Nergy Conversions: University of TechnologyDokument9 SeitenNergy Conversions: University of TechnologyFadhil A. HasanNoch keine Bewertungen
- DC Machine 2Dokument20 SeitenDC Machine 2Fadhil A. HasanNoch keine Bewertungen
- 10309Dokument14 Seiten10309Fadhil A. HasanNoch keine Bewertungen
- DC Machine 1Dokument18 SeitenDC Machine 1Fadhil A. HasanNoch keine Bewertungen
- 33165Dokument14 Seiten33165Fadhil A. HasanNoch keine Bewertungen
- 17 29 PDFDokument13 Seiten17 29 PDFFadhil A. HasanNoch keine Bewertungen
- Joe 2015 0145 PDFDokument5 SeitenJoe 2015 0145 PDFFadhil A. HasanNoch keine Bewertungen
- Researchpaper - Analysis of Heat Distribution For Different Types of Traveling PDFDokument8 SeitenResearchpaper - Analysis of Heat Distribution For Different Types of Traveling PDFFadhil A. HasanNoch keine Bewertungen
- Five-Phase Travelling Wave Induction Heater For Continuous Heating of at MaterialDokument5 SeitenFive-Phase Travelling Wave Induction Heater For Continuous Heating of at MaterialFadhil A. HasanNoch keine Bewertungen
- Suspected Rotorbar Problem On The MotorDokument12 SeitenSuspected Rotorbar Problem On The MotorEmmanuel OgarNoch keine Bewertungen
- 6th Sem Bput Eee SyllabusDokument8 Seiten6th Sem Bput Eee SyllabusSuneet Kumar RathNoch keine Bewertungen
- Steady State Performance Equations of Induction Motor: B Raja Deepak Srinivas.RDokument11 SeitenSteady State Performance Equations of Induction Motor: B Raja Deepak Srinivas.Rv_thomasNoch keine Bewertungen
- Principles of Alternating Current Machinery 1000193702 PDFDokument660 SeitenPrinciples of Alternating Current Machinery 1000193702 PDFAhmad CakepNoch keine Bewertungen
- Electrical Technology-Synchronous Motor ApplicationsDokument2 SeitenElectrical Technology-Synchronous Motor ApplicationsAnoop MathewNoch keine Bewertungen
- Question BankqDokument15 SeitenQuestion BankqlalitaerankiNoch keine Bewertungen
- Generator Connection Form Provides Technical DetailsDokument9 SeitenGenerator Connection Form Provides Technical DetailsVikas VernekarNoch keine Bewertungen
- Automatic sorting, counting and bottle filling systemDokument90 SeitenAutomatic sorting, counting and bottle filling systemYeshwanth Surya VelayuthamNoch keine Bewertungen
- PV Peak Power Tracking Using Six-Step Square Wave InverterDokument8 SeitenPV Peak Power Tracking Using Six-Step Square Wave InverterrcmscribdNoch keine Bewertungen
- Gate Model PaperDokument32 SeitenGate Model PapererjayprakashpatelNoch keine Bewertungen
- 1st Semester Syllabus 2015 16Dokument54 Seiten1st Semester Syllabus 2015 16KrishnaMurthyTPNoch keine Bewertungen
- Induction Motor Model Example SolutionDokument8 SeitenInduction Motor Model Example SolutionJocel GuzmanNoch keine Bewertungen
- Myvariable Frequency Drive: by Pritam SenDokument69 SeitenMyvariable Frequency Drive: by Pritam SenArindam Samanta100% (2)
- CircuitTheory of ReluctanceMachines - PartIIDokument11 SeitenCircuitTheory of ReluctanceMachines - PartIITaiwoNoch keine Bewertungen
- Electric Machines LabDokument68 SeitenElectric Machines Labahmad.a.touseefNoch keine Bewertungen
- Motor Circuit Analysis For Energy, Reliability and Production Cost ImprovementsDokument4 SeitenMotor Circuit Analysis For Energy, Reliability and Production Cost ImprovementsAmin Mustangin As-SalafyNoch keine Bewertungen
- IMAC XXII Conf s09p08 Modal Based Predictive Design Analysis Electric MotorsDokument22 SeitenIMAC XXII Conf s09p08 Modal Based Predictive Design Analysis Electric MotorsBurak AteşNoch keine Bewertungen
- Speed Control Methods of Various Types of Speed Control Motors by Kazuya SHIRAHATADokument9 SeitenSpeed Control Methods of Various Types of Speed Control Motors by Kazuya SHIRAHATAchrist_f2009Noch keine Bewertungen
- Estimation of Motor ParametersDokument6 SeitenEstimation of Motor ParametersAlvinMaghirangNoch keine Bewertungen
- AUTOMATION & Drives PDFDokument127 SeitenAUTOMATION & Drives PDFMartinez 100Noch keine Bewertungen
- 9 - Electrical FaultDokument24 Seiten9 - Electrical Faultmohamed ghoneemNoch keine Bewertungen
- Buet Eee Ug Obe 2023 02 20Dokument344 SeitenBuet Eee Ug Obe 2023 02 20S M Parvez AhmmedNoch keine Bewertungen
- Single Phase and Three Phase Motor QuizDokument2 SeitenSingle Phase and Three Phase Motor QuizMeryL AngNoch keine Bewertungen
- Manual SPM EMC 11 PDFDokument2 SeitenManual SPM EMC 11 PDFCharles MatosNoch keine Bewertungen
- Small Gearmotors - Overview: Qcalculation Formula of Load Torque Qmotor SelectionDokument1 SeiteSmall Gearmotors - Overview: Qcalculation Formula of Load Torque Qmotor SelectionNitinNoch keine Bewertungen
- CIA-III 2018-19 Even Kee 201Dokument2 SeitenCIA-III 2018-19 Even Kee 201amit621988Noch keine Bewertungen
- What Is a Motor Starter? Types, Advantages & ApplicationsDokument8 SeitenWhat Is a Motor Starter? Types, Advantages & Applicationshussein muyombyaNoch keine Bewertungen
- Notice JE 30092016Dokument36 SeitenNotice JE 30092016zabiullaNoch keine Bewertungen
- Smart Grid 7 - Control of GeneratorsDokument113 SeitenSmart Grid 7 - Control of GeneratorsĐức TùngNoch keine Bewertungen
- Electrical Engineering Interview QuestionsDokument28 SeitenElectrical Engineering Interview QuestionsAmirSaeed0% (1)