Das könnte Ihnen auch gefallen
- Frequency Domain Filtering: CS474/674 - Prof. BebisDokument55 SeitenFrequency Domain Filtering: CS474/674 - Prof. Bebisrao3farhat3masoodNoch keine Bewertungen
- Filtering in Frequency Domain1Dokument62 SeitenFiltering in Frequency Domain1nandkishor joshiNoch keine Bewertungen
- WINSEM2022-23 CSE4019 ETH VL2022230503082 2023-03-02 Reference-Material-IDokument35 SeitenWINSEM2022-23 CSE4019 ETH VL2022230503082 2023-03-02 Reference-Material-Ipadm kesavNoch keine Bewertungen
- Frequency Domain Filtering (Chapter 4) : CS474/674 - Prof. BebisDokument59 SeitenFrequency Domain Filtering (Chapter 4) : CS474/674 - Prof. BebisMohammed AL-MaaitahNoch keine Bewertungen
- DIP Chap 4 (Filtering in The Frequency Domain) Lect 11Dokument45 SeitenDIP Chap 4 (Filtering in The Frequency Domain) Lect 11kandeelllNoch keine Bewertungen
- Frequency DomainDokument71 SeitenFrequency Domainsanju_arora19Noch keine Bewertungen
- Frequency Domain Filtering Image ProcessingDokument24 SeitenFrequency Domain Filtering Image ProcessingSankalp_Kallakur_402100% (1)
- High-Pass and Band-Pass Filtering: CS 450: Introduction To Digital Signal and Image ProcessingDokument17 SeitenHigh-Pass and Band-Pass Filtering: CS 450: Introduction To Digital Signal and Image Processingbhoomi achalNoch keine Bewertungen
- Smoothing Frequency Domain FiltersDokument22 SeitenSmoothing Frequency Domain FiltersRaymond PraveenNoch keine Bewertungen
- Image Sharpening Using FDFDokument4 SeitenImage Sharpening Using FDFAdonay YirgaNoch keine Bewertungen
- Image Sharpening Using Frequency Domain Filters: HP LPDokument4 SeitenImage Sharpening Using Frequency Domain Filters: HP LPAdonay YirgaNoch keine Bewertungen
- FIR DesignDokument27 SeitenFIR DesignBelachew AyaliewNoch keine Bewertungen
- Image RestorationDokument70 SeitenImage RestorationJoelNoch keine Bewertungen
- Filtering in The Frequency DomainDokument35 SeitenFiltering in The Frequency DomainKarthikeyaNoch keine Bewertungen
- Lab 8Dokument8 SeitenLab 8alif fudenNoch keine Bewertungen
- Relationship Between Spatial Interval & Frequency Intervals: © 2002 R. C. Gonzalez & R. E. WoodsDokument16 SeitenRelationship Between Spatial Interval & Frequency Intervals: © 2002 R. C. Gonzalez & R. E. WoodsanandbabugopathotiNoch keine Bewertungen
- Image Enhancement in The FDDokument22 SeitenImage Enhancement in The FDImran BashaNoch keine Bewertungen
- Chapter 7 SlidesDokument62 SeitenChapter 7 Slideskwaleed717Noch keine Bewertungen
- DIP Lecture 07Dokument31 SeitenDIP Lecture 07sanjila parvinNoch keine Bewertungen
- Image Enhancement in The Frequency DomainDokument43 SeitenImage Enhancement in The Frequency Domainmusicstand29Noch keine Bewertungen
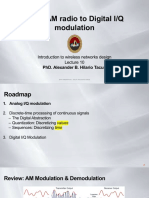
- From AM Radio To Digital I/Q ModulationDokument57 SeitenFrom AM Radio To Digital I/Q Modulationjtz00000Noch keine Bewertungen
- Frequency Domain FiltersDokument43 SeitenFrequency Domain FiltersRakesh InaniNoch keine Bewertungen
- Digital Image and Video Processing (UEC1722) Unit - I Fundamentals of Image ProcessingDokument35 SeitenDigital Image and Video Processing (UEC1722) Unit - I Fundamentals of Image Processingsrinivas CVNoch keine Bewertungen
- Module 3 2 DZRkw8i1IXDokument72 SeitenModule 3 2 DZRkw8i1IXAEC OFFICIALNoch keine Bewertungen
- Audio Processing Using MatlabDokument12 SeitenAudio Processing Using MatlabMuneeb IrfanNoch keine Bewertungen
- Filtering in The Frequency DomainDokument34 SeitenFiltering in The Frequency DomainK.R.Raguram100% (1)
- Image Enhancement - Frequency DomainDokument33 SeitenImage Enhancement - Frequency DomainKani MozhiNoch keine Bewertungen
- Freq Fil Expt 4Dokument10 SeitenFreq Fil Expt 4balaji sivaNoch keine Bewertungen
- Unit - 2 - Part IIIDokument63 SeitenUnit - 2 - Part IIIkrishna chaitanyaNoch keine Bewertungen
- DF Lesson 02Dokument78 SeitenDF Lesson 02srirspNoch keine Bewertungen
- Chapter 4B Part B: Digital Processing of Continuous-Time Signals Design of Analog FiltersDokument3 SeitenChapter 4B Part B: Digital Processing of Continuous-Time Signals Design of Analog FiltersAnonymous PkeI8e84RsNoch keine Bewertungen
- 2-RC Filter Circuits and LCR Resonance CircuitsDokument13 Seiten2-RC Filter Circuits and LCR Resonance CircuitsaxelNoch keine Bewertungen
- Lecture10 DigitalDokument53 SeitenLecture10 DigitalMaggiNoch keine Bewertungen
- FIR LectDokument62 SeitenFIR LectDepartment of Industrial ElectronicsNoch keine Bewertungen
- Image Enhancement in The Frequency Domain: GZ Chapter 4Dokument66 SeitenImage Enhancement in The Frequency Domain: GZ Chapter 4ITTAPPA HATTIMANINoch keine Bewertungen
- UNIT 3 - Mobile Radio Propagation: Small-Scale Fading and MultipathDokument35 SeitenUNIT 3 - Mobile Radio Propagation: Small-Scale Fading and MultipathPriya DarshuNoch keine Bewertungen
- Chapter 5 Image Restoration - 01Dokument37 SeitenChapter 5 Image Restoration - 01Aman Ahmad SiddiqueeNoch keine Bewertungen
- FIR Digital Filters - 2021Dokument85 SeitenFIR Digital Filters - 2021Sourya DasguptaNoch keine Bewertungen
- FiltersDokument31 SeitenFiltersdjnidubeNoch keine Bewertungen
- Digital Filter DesignDokument37 SeitenDigital Filter DesignAsmaa MosbehNoch keine Bewertungen
- M.Phil (CSE) M.S UniversityDokument37 SeitenM.Phil (CSE) M.S UniversityRoshitha K0% (1)
- Audio Sieving Using Signal FiltersDokument19 SeitenAudio Sieving Using Signal FiltersPiyush YadavNoch keine Bewertungen
- ECE 468: Digital Image Processing: Prof. Sinisa Todorovic Sinisa@eecs - Oregonstate.eduDokument36 SeitenECE 468: Digital Image Processing: Prof. Sinisa Todorovic Sinisa@eecs - Oregonstate.eduWikiNoch keine Bewertungen
- Image Enhancement in The Frequency Domain: GZ Chapter 4Dokument66 SeitenImage Enhancement in The Frequency Domain: GZ Chapter 4Shabrin AhammedNoch keine Bewertungen
- IIR Filter Using Butterworth Filter ApproximationDokument11 SeitenIIR Filter Using Butterworth Filter ApproximationdeviNoch keine Bewertungen
- Module 3 Part CDokument29 SeitenModule 3 Part CshivubhavvNoch keine Bewertungen
- Filtering LNDokument43 SeitenFiltering LNAgatha AstriseleNoch keine Bewertungen
- Butterworth Filter Design: Ω N is the order of the filterDokument3 SeitenButterworth Filter Design: Ω N is the order of the filterDharmendra MehtaNoch keine Bewertungen
- L19 - Image Restoration IDokument30 SeitenL19 - Image Restoration IramadeviNoch keine Bewertungen
- Digital Image ProcessingDokument39 SeitenDigital Image Processingstar xNoch keine Bewertungen
- 04 Digital Filters ReleaseDokument29 Seiten04 Digital Filters ReleaseTrilishiya WeerasingheNoch keine Bewertungen
- DIP Module 3Dokument61 SeitenDIP Module 3sasindhur rNoch keine Bewertungen
- EEN 725 Advanced Digital Signal ProcessingDokument29 SeitenEEN 725 Advanced Digital Signal ProcessingSaad RashidNoch keine Bewertungen
- Image Enhancement: Frequency Domain Methods: N M F N M H N M GDokument16 SeitenImage Enhancement: Frequency Domain Methods: N M F N M H N M GbagareyNoch keine Bewertungen
- Active Lowpass, Highpass and BandpassDokument5 SeitenActive Lowpass, Highpass and BandpassSANNoch keine Bewertungen
- Low Pass and High Pass FiltersDokument52 SeitenLow Pass and High Pass Filtersak21193Noch keine Bewertungen
- Mobile Radio Propagation: Small-Scale Fading and MultipathDokument88 SeitenMobile Radio Propagation: Small-Scale Fading and MultipathKhyati ZalawadiaNoch keine Bewertungen
- 17 - dsp11 - MSCDokument37 Seiten17 - dsp11 - MSCzainab alghanimNoch keine Bewertungen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- An Internetof Things Based Air Conditioningand Lighting Control Systemfor Smart HomeDokument10 SeitenAn Internetof Things Based Air Conditioningand Lighting Control Systemfor Smart Homeneoronic17Noch keine Bewertungen
- S ENDDokument1 SeiteS ENDneoronic17Noch keine Bewertungen
- Title: Date Course Title Student'S Name Teacher'S NameDokument4 SeitenTitle: Date Course Title Student'S Name Teacher'S NameGalih WicaksonoNoch keine Bewertungen
- CV ExampleDokument1 SeiteCV ExampleRui GavinaNoch keine Bewertungen
- IotDokument6 SeitenIotSathiyaSeelaNoch keine Bewertungen
- Home Automation Based On IOT: ISSN: 2454-132X Impact Factor: 4.295Dokument4 SeitenHome Automation Based On IOT: ISSN: 2454-132X Impact Factor: 4.295neoronic17Noch keine Bewertungen
- 6N7 Ijeset711Dokument7 Seiten6N7 Ijeset711neoronic17Noch keine Bewertungen
- Home AutomationDokument14 SeitenHome Automationneoronic17Noch keine Bewertungen
- A Survey On Technologies Standards and Open ChalleDokument27 SeitenA Survey On Technologies Standards and Open Challeneoronic17Noch keine Bewertungen
- Ografia Siupsi Mei16 Rohaida Edam1Dokument9 SeitenOgrafia Siupsi Mei16 Rohaida Edam1neoronic17Noch keine Bewertungen
- Internet of Things (Iot) : Blynk Framework For Smart Home: Conference PaperDokument8 SeitenInternet of Things (Iot) : Blynk Framework For Smart Home: Conference Paperneoronic17Noch keine Bewertungen
- 3Dokument8 Seiten3neoronic17Noch keine Bewertungen
- All About Stepper MotorsDokument28 SeitenAll About Stepper MotorsPrasanth100% (1)
- All Osh SchoolDokument3 SeitenAll Osh Schoolneoronic17Noch keine Bewertungen
- File 1 Proteus Tutorial For Digital Circuit Design PDFDokument8 SeitenFile 1 Proteus Tutorial For Digital Circuit Design PDFmesraeNoch keine Bewertungen
- All About Stepper MotorsDokument28 SeitenAll About Stepper MotorsPrasanth100% (1)
- All About Stepper MotorsDokument28 SeitenAll About Stepper MotorsPrasanth100% (1)
- Gantt Chart ExamplesDokument5 SeitenGantt Chart Examplesneoronic17Noch keine Bewertungen
- Programming 8-Bit Pic Microcontrollers Inc: Martin Bates Elsevier 2008Dokument30 SeitenProgramming 8-Bit Pic Microcontrollers Inc: Martin Bates Elsevier 2008SonyKurupNoch keine Bewertungen
- All Chemical PDFDokument2 SeitenAll Chemical PDFneoronic17Noch keine Bewertungen
- Create A PDF File: Exercise 1 and Exercise 2 Produce The Same Result. Choose The One That Works Best For YouDokument6 SeitenCreate A PDF File: Exercise 1 and Exercise 2 Produce The Same Result. Choose The One That Works Best For Youneoronic17Noch keine Bewertungen
- Manual ProteusDokument477 SeitenManual ProteusJose Negley Torres OcarizNoch keine Bewertungen
- Chapter-12 Perf Appraisal & Career Strategy (I.m.s)Dokument4 SeitenChapter-12 Perf Appraisal & Career Strategy (I.m.s)Waris KhanNoch keine Bewertungen
- TM Matematika X IPA 8Dokument31 SeitenTM Matematika X IPA 8Muhammad Ilyas ArradyaNoch keine Bewertungen
- Manual de Servicio CX 350B 84355067-Dmc Site OnlyDokument127 SeitenManual de Servicio CX 350B 84355067-Dmc Site Onlyabel jairo santos cabello100% (2)
- Uvod PDFDokument13 SeitenUvod PDFbarbara5153Noch keine Bewertungen
- Qualifications: Stephanie WarringtonDokument3 SeitenQualifications: Stephanie Warringtonapi-268210901Noch keine Bewertungen
- How To Use SQL Servers Extended Events and Notifications White Paper 24902Dokument20 SeitenHow To Use SQL Servers Extended Events and Notifications White Paper 24902Santosh KadamNoch keine Bewertungen
- Siemens - Microsoft Hyper V Case StudyDokument2 SeitenSiemens - Microsoft Hyper V Case StudyPaul AdamsNoch keine Bewertungen
- Maria Bolboaca - Lucrare de LicentaDokument68 SeitenMaria Bolboaca - Lucrare de LicentaBucurei Ion-AlinNoch keine Bewertungen
- LC OscillationsDokument9 SeitenLC OscillationsNaveen BabbarNoch keine Bewertungen
- Cerita BugisDokument14 SeitenCerita BugisI'dris M11Noch keine Bewertungen
- School of Education - Writing A Research Proposal - Durham UniversityDokument2 SeitenSchool of Education - Writing A Research Proposal - Durham UniversityRussasmita Sri PadmiNoch keine Bewertungen
- Youtube Poop: Subverting Art OnlineDokument14 SeitenYoutube Poop: Subverting Art OnlineWill KurlinkusNoch keine Bewertungen
- Community Service - Group 3 - Project 2Dokument24 SeitenCommunity Service - Group 3 - Project 2rofiq wibawantoNoch keine Bewertungen
- Daily Lesson Log: Department of EducationDokument10 SeitenDaily Lesson Log: Department of EducationStevenson Libranda BarrettoNoch keine Bewertungen
- Absolute Duo 1 PDFDokument219 SeitenAbsolute Duo 1 PDFAgnieškaRužičkaNoch keine Bewertungen
- Detailed Lesson Plan - Hand Movements and Gestures in Folk DanceDokument2 SeitenDetailed Lesson Plan - Hand Movements and Gestures in Folk DanceJaime MenceroNoch keine Bewertungen
- Modicon M580 Quick Start - v1.0 - Training ManualDokument169 SeitenModicon M580 Quick Start - v1.0 - Training Manualaryan_iust0% (1)
- Psych ManualDokument340 SeitenPsych ManualMarius_20100% (1)
- Hawk RoostingDokument11 SeitenHawk RoostingMOKIBUL ISLAM MOKIPSNoch keine Bewertungen
- 2 How To - Tests of Copy Configuration From Client 000 - Note 2838358 - Part3Dokument15 Seiten2 How To - Tests of Copy Configuration From Client 000 - Note 2838358 - Part3Helbert GarofoloNoch keine Bewertungen
- PV Quick StartDokument61 SeitenPV Quick StartMayur PatelNoch keine Bewertungen
- Rigstoreef Impact or Enhancement On Marine Biodiversity 2157 7625 1000187Dokument9 SeitenRigstoreef Impact or Enhancement On Marine Biodiversity 2157 7625 1000187tavis80Noch keine Bewertungen
- Ad For Natbps WB PDFDokument7 SeitenAd For Natbps WB PDFrajpal singhNoch keine Bewertungen
- Taylor Linker ResumeDokument2 SeitenTaylor Linker ResumeTaylor LinkerNoch keine Bewertungen
- French DELF A1 Exam PDFDokument10 SeitenFrench DELF A1 Exam PDFMishtiNoch keine Bewertungen
- Construction Manual California PDFDokument956 SeitenConstruction Manual California PDFAlexander Ponce VelardeNoch keine Bewertungen
- The FlirterDokument2 SeitenThe Flirterdddbbb7Noch keine Bewertungen
- Abstract - Freezing Point Depression Is ADokument5 SeitenAbstract - Freezing Point Depression Is AMinahNoch keine Bewertungen
- MODBUSDokument19 SeitenMODBUSJosé Luis MartínezNoch keine Bewertungen
- Edci 67200 Abby Carlin Case Study FacilitationDokument9 SeitenEdci 67200 Abby Carlin Case Study Facilitationapi-265670845Noch keine Bewertungen