Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- STsWeek5 - Desert Survival Exercise, Answers & RationaleDokument3 SeitenSTsWeek5 - Desert Survival Exercise, Answers & RationaleK60 Nguyễn Thiên NgọcNoch keine Bewertungen
- Manual: Laying Loops For Loop Detector LC10-1 and LC10-2Dokument18 SeitenManual: Laying Loops For Loop Detector LC10-1 and LC10-2ISRAEL AMADORNoch keine Bewertungen
- Air Asia Marketing PlanDokument18 SeitenAir Asia Marketing PlanDharshviny Sasidharan100% (1)
- 27 RegulatorsDokument23 Seiten27 RegulatorsRafael_jorge_7067% (3)
- Project REPORTDokument15 SeitenProject REPORTShamim AkhtarNoch keine Bewertungen
- Outlander Max Dps 2022: HighlightsDokument1 SeiteOutlander Max Dps 2022: HighlightsPrinceVZLANoch keine Bewertungen
- Northwest African Air Forces-1943Dokument39 SeitenNorthwest African Air Forces-1943cjnjr1Noch keine Bewertungen
- PPP ModelDokument40 SeitenPPP ModelMainak BhattacharjeeNoch keine Bewertungen
- Approach Warning To Midsection Interlocked LC GatesDokument2 SeitenApproach Warning To Midsection Interlocked LC GatesShashankRaghavNoch keine Bewertungen
- Normal Checklist: Preliminary Cockpit Preparation (Silent)Dokument2 SeitenNormal Checklist: Preliminary Cockpit Preparation (Silent)Rob Gronkowsky100% (2)
- Kerem David ENGDokument46 SeitenKerem David ENGאר מסNoch keine Bewertungen
- DORMA EL 301 Automatic Door Operator Specification Sheet 2014Dokument2 SeitenDORMA EL 301 Automatic Door Operator Specification Sheet 2014Clifford Juan Correa0% (1)
- Kami Export - CrumpleZonesSE PDFDokument10 SeitenKami Export - CrumpleZonesSE PDFAlaina VillatoroNoch keine Bewertungen
- HSC Business Studies Revision Guide PDFDokument96 SeitenHSC Business Studies Revision Guide PDFckNoch keine Bewertungen
- E-Ticket Receipt & Itinerary: Taxes/Fees/ChargesDokument2 SeitenE-Ticket Receipt & Itinerary: Taxes/Fees/ChargesWillette MuschNoch keine Bewertungen
- C-27J Next Gen - Datasheet - ENGDokument2 SeitenC-27J Next Gen - Datasheet - ENGThallez0% (2)
- Mercedes-Benz C63 AMG 2015Dokument12 SeitenMercedes-Benz C63 AMG 2015Claudio RetamalNoch keine Bewertungen
- SJ6826/32 RT: Rough Terrain ScissorsDokument2 SeitenSJ6826/32 RT: Rough Terrain ScissorsElias CamachoNoch keine Bewertungen
- 8frba SeriesDokument2 Seiten8frba Seriesargo kuncahyoNoch keine Bewertungen
- NCP 30Dokument31 SeitenNCP 30Arunashish MazumdarNoch keine Bewertungen
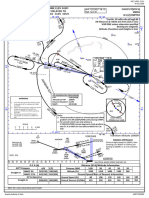
- Vocl-Ils (Z) - Rwy-10Dokument1 SeiteVocl-Ils (Z) - Rwy-10tanyaqthomasNoch keine Bewertungen
- Case 16-57 BlueRidgeSchool 1Dokument12 SeitenCase 16-57 BlueRidgeSchool 1agharizliaNoch keine Bewertungen
- Fiem IndDokument13 SeitenFiem Indmaniamson83% (6)
- Interaction 1 PDFDokument7 SeitenInteraction 1 PDFSatya Prakash BhardwajNoch keine Bewertungen
- Victoria English WebDokument8 SeitenVictoria English WebEusebio EspinozaNoch keine Bewertungen
- Tiguan VWDokument6 SeitenTiguan VWMeor Amri100% (2)
- Xix Commonwealth Games, Delhi: Team Olympias MemberssDokument38 SeitenXix Commonwealth Games, Delhi: Team Olympias MemberssMd Kalim AhmedNoch keine Bewertungen
- LAW6CON VariationsDokument55 SeitenLAW6CON VariationsKelvin LunguNoch keine Bewertungen
- Roland Berger World Rail Market Presentation FinalDokument21 SeitenRoland Berger World Rail Market Presentation FinalAnand Raj DoraisingamNoch keine Bewertungen
- Gas Turbine Exhaust: Expansion Joints ForDokument12 SeitenGas Turbine Exhaust: Expansion Joints Formahesh_hivarkarNoch keine Bewertungen