Das könnte Ihnen auch gefallen
- Sesión de Aprendizaje - Medimos El Tiempo en El RelojDokument6 SeitenSesión de Aprendizaje - Medimos El Tiempo en El RelojEliana Honorio94% (32)
- AGUSTÍN HernandezDokument55 SeitenAGUSTÍN HernandezAndo Cano0% (1)
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Von EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Bewertung: 2 von 5 Sternen2/5 (1)
- Instrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Von EverandInstrumentación y control en instalaciones de proceso, energía y servicios auxiliares. QUIE0108Bewertung: 4.5 von 5 Sternen4.5/5 (8)
- Monografia Ingeneirea de ControDokument13 SeitenMonografia Ingeneirea de ControCristian Chata ClarosNoch keine Bewertungen
- AutomatizacionDokument10 SeitenAutomatizacionDanitza TacoNoch keine Bewertungen
- Fundamentos de Control Automático de Procesos-Osvaldo Vasconcelos JiménezDokument5 SeitenFundamentos de Control Automático de Procesos-Osvaldo Vasconcelos Jiménezosvaldo vasconcelos jimenezNoch keine Bewertungen
- Actividad 2 ControlesDokument13 SeitenActividad 2 ControlesJesus Elias Melendez AvilaNoch keine Bewertungen
- Ing CTRLDokument4 SeitenIng CTRL123drk010Noch keine Bewertungen
- Fundamentos de Control ModernoDokument11 SeitenFundamentos de Control ModernoMarco Antonio CiauNoch keine Bewertungen
- Tema 67Dokument12 SeitenTema 67Beatriz San José SecoNoch keine Bewertungen
- Capitulo I Control I 2019 IIDokument25 SeitenCapitulo I Control I 2019 IIWilinthon Segura Ortega100% (1)
- Tipos de ControladoresDokument8 SeitenTipos de ControladoresDiego Jose CameyNoch keine Bewertungen
- Teoría de ControlDokument58 SeitenTeoría de ControlVladimir MendozaNoch keine Bewertungen
- Sistemas de ControlDokument21 SeitenSistemas de Controlsaint1386Noch keine Bewertungen
- Filosofia de Control y AbreviaturasDokument12 SeitenFilosofia de Control y Abreviaturasluis angel jimenes vasquezNoch keine Bewertungen
- UC - PC - Unidad 1Dokument5 SeitenUC - PC - Unidad 1juan ruizNoch keine Bewertungen
- Capitulo I Control I Teoria 2016 IDokument17 SeitenCapitulo I Control I Teoria 2016 IYhon Polanco AimitumaNoch keine Bewertungen
- Unidad I Sistemas de ControlDokument11 SeitenUnidad I Sistemas de ControllenochiNoch keine Bewertungen
- Sistema de Control Automático y Alineación.Dokument13 SeitenSistema de Control Automático y Alineación.Eduard GamboaNoch keine Bewertungen
- Control LinealDokument15 SeitenControl LinealAdriann Lopez MartinezNoch keine Bewertungen
- Control UnexpoDokument151 SeitenControl UnexpoLisandroNoch keine Bewertungen
- Ensayo - Sistemas de Control AutomáticoDokument4 SeitenEnsayo - Sistemas de Control AutomáticoMayra GonzalezNoch keine Bewertungen
- Sistema de ControlDokument221 SeitenSistema de Controlmatiastello37Noch keine Bewertungen
- Método de Ganancia Última - Dinámica de Procesos e InstrumentaciónDokument30 SeitenMétodo de Ganancia Última - Dinámica de Procesos e InstrumentaciónRichard UrbanoNoch keine Bewertungen
- ControladoresDokument19 SeitenControladoresJesús L Reina BNoch keine Bewertungen
- Control ProcesosDokument16 SeitenControl ProcesosJose gregorio herrera paredesNoch keine Bewertungen
- Introducción A Los Sistemas de ControlDokument6 SeitenIntroducción A Los Sistemas de ControlTomas Casiano ArielNoch keine Bewertungen
- Control RetroalimentadoDokument41 SeitenControl RetroalimentadoJavier Chaiña0% (1)
- Control RetroalimentadoDokument39 SeitenControl RetroalimentadoJavier ChaiñaNoch keine Bewertungen
- 21507-14 TECNOLOGÍA de CONTROL - Introducción Al Modelado de Sistemas FísicosDokument20 Seiten21507-14 TECNOLOGÍA de CONTROL - Introducción Al Modelado de Sistemas FísicosPaola MasaNoch keine Bewertungen
- Controles Automaticos 10%Dokument6 SeitenControles Automaticos 10%cesarNoch keine Bewertungen
- Unidad 6 Control Clasico Avanzado 2Dokument18 SeitenUnidad 6 Control Clasico Avanzado 2Jomar GuzmanNoch keine Bewertungen
- Portafolio Bravo de Leon Jared de JesusDokument110 SeitenPortafolio Bravo de Leon Jared de JesusJared BravoNoch keine Bewertungen
- Documento - Grupo - 4 - Sistemas de Control y ServiciosDokument25 SeitenDocumento - Grupo - 4 - Sistemas de Control y ServiciosEddisom PathinNoch keine Bewertungen
- Control AutomaticoDokument13 SeitenControl AutomaticoJadiel Isai100% (2)
- Unidad 1 Ingeneria ControlDokument9 SeitenUnidad 1 Ingeneria Controlhector quiroz garciaNoch keine Bewertungen
- 21502-15 TECNOLOGÍA DE CONTROL - Introduccion Al Modelado de Sistemas Fisicos PDFDokument15 Seiten21502-15 TECNOLOGÍA DE CONTROL - Introduccion Al Modelado de Sistemas Fisicos PDFFox NekNoch keine Bewertungen
- Sistemas Fisicos 2Dokument6 SeitenSistemas Fisicos 2Daniel E. Ramos RicardezNoch keine Bewertungen
- Simulacion de Los Sistemas de ControlDokument13 SeitenSimulacion de Los Sistemas de ControlGesse SteinerNoch keine Bewertungen
- AutomatizaciónDokument56 SeitenAutomatizaciónFavio QuijadaNoch keine Bewertungen
- Sistema de ComunicaciónDokument11 SeitenSistema de ComunicaciónAlejandra ParraNoch keine Bewertungen
- Tecnicas de Control de Chancadoras.Dokument12 SeitenTecnicas de Control de Chancadoras.marcos ruizNoch keine Bewertungen
- Actividad Fundamentos de Control Automático de ProcesosDokument12 SeitenActividad Fundamentos de Control Automático de ProcesosManuel RamosNoch keine Bewertungen
- Informe Sistemas de Control Practica 8 ParteDokument6 SeitenInforme Sistemas de Control Practica 8 ParteGamer AllianceNoch keine Bewertungen
- 21504-16 TECNOLOGIAS DE CONTROL Introducción Al Modelado de Sistemas FísicosDokument15 Seiten21504-16 TECNOLOGIAS DE CONTROL Introducción Al Modelado de Sistemas FísicosTGANoch keine Bewertungen
- Def Los Sig Terminos-ABUITRONDokument5 SeitenDef Los Sig Terminos-ABUITRONArthur Alexis Buitron DurandNoch keine Bewertungen
- Control Clasico y Control ModernoDokument5 SeitenControl Clasico y Control ModernoFernando Alberto Salgado Amado100% (1)
- Situación Problemática Porton NUEVADokument13 SeitenSituación Problemática Porton NUEVASilvia GirolamiNoch keine Bewertungen
- Controles AutomaticosDokument70 SeitenControles Automaticosfrankz89100% (1)
- Tema 1. Introducción A Mediciones y Control Automático.Dokument64 SeitenTema 1. Introducción A Mediciones y Control Automático.Magdiel Ezequiel AguirreNoch keine Bewertungen
- Sistemas de Control en Lazo Abierto y CerradoDokument26 SeitenSistemas de Control en Lazo Abierto y CerradoHomero Esquivel Cedillo100% (1)
- Simulacion de Sistemas de ControlDokument27 SeitenSimulacion de Sistemas de ControlAndrea LedesmaNoch keine Bewertungen
- Informe Control EeDokument18 SeitenInforme Control EeGianella EmiliNoch keine Bewertungen
- Introduccion 21aDokument21 SeitenIntroduccion 21aFaustoPolancoAriasNoch keine Bewertungen
- Investigacion Que Es El ControlDokument9 SeitenInvestigacion Que Es El ControlAntonio Elvira SanchezNoch keine Bewertungen
- Definiciones Basicas de ControlDokument16 SeitenDefiniciones Basicas de Controlgvobioelectric100% (1)
- Semana 1.1 IntroduccionDokument56 SeitenSemana 1.1 Introduccionvaleria mendozaNoch keine Bewertungen
- Control Automatico 406 - Tarea 1 PDFDokument12 SeitenControl Automatico 406 - Tarea 1 PDFGustavo BarciaNoch keine Bewertungen
- UNIDAD 1 ControlesDokument6 SeitenUNIDAD 1 ControlesGus DelgadoNoch keine Bewertungen
- Parcial 2Dokument2 SeitenParcial 2bryner ramirezNoch keine Bewertungen
- Mecatrónica: modelado, simulación y control de sistemas físicosVon EverandMecatrónica: modelado, simulación y control de sistemas físicosNoch keine Bewertungen
- Instrumentos de Medicion para El Mantenimiento PredictivoDokument17 SeitenInstrumentos de Medicion para El Mantenimiento PredictivoAlejandro Miguel MacarenoNoch keine Bewertungen
- II Unidad Equipos Secundarios y de ProteccionDokument10 SeitenII Unidad Equipos Secundarios y de ProteccionAlejandro Miguel MacarenoNoch keine Bewertungen
- Unidad IV CA Luis Angel Miguel MacarenoDokument62 SeitenUnidad IV CA Luis Angel Miguel MacarenoAlejandro Miguel MacarenoNoch keine Bewertungen
- Alejandro Miguel Macareno Comunicacion de Protocolos de InvestigacionDokument13 SeitenAlejandro Miguel Macareno Comunicacion de Protocolos de InvestigacionAlejandro Miguel MacarenoNoch keine Bewertungen
- Dinamica EjerciciosDokument6 SeitenDinamica EjerciciosAlejandro Miguel MacarenoNoch keine Bewertungen
- Practica 1 AnsysDokument6 SeitenPractica 1 AnsysAlejandro Miguel MacarenoNoch keine Bewertungen
- Carta PsicrometricaDokument7 SeitenCarta PsicrometricaAlejandro Miguel MacarenoNoch keine Bewertungen
- 3.3 Enlace IonicoDokument6 Seiten3.3 Enlace IonicoAlejandro Miguel MacarenoNoch keine Bewertungen
- Electronica Digital Unidad 2Dokument46 SeitenElectronica Digital Unidad 2Alejandro Miguel MacarenoNoch keine Bewertungen
- Administración y Técnicas de MantenimientoDokument16 SeitenAdministración y Técnicas de MantenimientoAlejandro Miguel MacarenoNoch keine Bewertungen
- 3.1.3 Aplicaciones y Limitaciones de La Regla Del OctetoDokument3 Seiten3.1.3 Aplicaciones y Limitaciones de La Regla Del OctetoAlejandro Miguel MacarenoNoch keine Bewertungen
- Tarea 6.1 - Cuadro Comparativo Entre El Período Barroco, Clásico, Romántico y Contemporaneo, Esteban Tabora Castro - #21411330.Dokument15 SeitenTarea 6.1 - Cuadro Comparativo Entre El Período Barroco, Clásico, Romántico y Contemporaneo, Esteban Tabora Castro - #21411330.Marshall LoackwoodNoch keine Bewertungen
- Empresa de ChocolateDokument25 SeitenEmpresa de ChocolateSaira Arely Tobar MoralesNoch keine Bewertungen
- MY SYMPTOMS Sesion 7 1 y 2 InglesDokument4 SeitenMY SYMPTOMS Sesion 7 1 y 2 InglesCarina Huillca Huamani100% (1)
- Perfil de Tesis - Aurelio Colan RodriguezDokument25 SeitenPerfil de Tesis - Aurelio Colan RodriguezJesús José Arosquipa PachariNoch keine Bewertungen
- Prueba de Aprendizaje Solucionario 1Dokument3 SeitenPrueba de Aprendizaje Solucionario 1Alvaro Gutiérrez TrocheNoch keine Bewertungen
- HOJA DE VISA TIVISAY Nueva PDFDokument3 SeitenHOJA DE VISA TIVISAY Nueva PDFtivisayNoch keine Bewertungen
- RESPONSABILIDAD SOCIAL y ETICA EMPRESARIAL - ROBBINS COULTERDokument33 SeitenRESPONSABILIDAD SOCIAL y ETICA EMPRESARIAL - ROBBINS COULTERBlanca FernandezNoch keine Bewertungen
- Cómo Se Pagan Las Vacaciones No Disfrutadas en MéxicoDokument6 SeitenCómo Se Pagan Las Vacaciones No Disfrutadas en MéxicoAnne GaleanaNoch keine Bewertungen
- Acuerdo 004-CG-2023 Normas de Control Interno PDFDokument96 SeitenAcuerdo 004-CG-2023 Normas de Control Interno PDFSandra Marivel Miraba GavilánezNoch keine Bewertungen
- Para Optar Al Título de Ingeniero CivilDokument279 SeitenPara Optar Al Título de Ingeniero CivilJonathan GutiérrezNoch keine Bewertungen
- Plan de Salud Territorial Villavicencio 2012-2015Dokument155 SeitenPlan de Salud Territorial Villavicencio 2012-2015Jonny SalazarNoch keine Bewertungen
- Reseña y Propuesta Cultural VenelengueDokument6 SeitenReseña y Propuesta Cultural VenelengueErika BenaventeNoch keine Bewertungen
- Diseña Tu Éxito 2022Dokument49 SeitenDiseña Tu Éxito 2022Andrea RodriguezNoch keine Bewertungen
- P-Ssoma-03-Fam - Mantenimiento de Subestacion Biposte Nº10Dokument2 SeitenP-Ssoma-03-Fam - Mantenimiento de Subestacion Biposte Nº10Gaby Rivera MezaNoch keine Bewertungen
- Actividades Extraescolares - B1 Inglés PDFDokument2 SeitenActividades Extraescolares - B1 Inglés PDFNatalia Sánchez MorenoNoch keine Bewertungen
- Conversión de UnidadesDokument9 SeitenConversión de UnidadesZiriNoch keine Bewertungen
- Profesiogramas Medicina LaboralDokument14 SeitenProfesiogramas Medicina LaboralAutopartes BaronNoch keine Bewertungen
- Manta para ReparacionDokument4 SeitenManta para ReparacionSergioNoch keine Bewertungen
- Programacion de Llaves ToyotaDokument30 SeitenProgramacion de Llaves ToyotaServicio Integral del EsteNoch keine Bewertungen
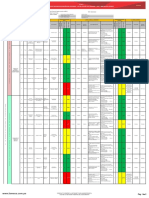
- Formato Igafom No Metalica PreventivoDokument76 SeitenFormato Igafom No Metalica PreventivoMonica Karina Arpe CalluchiNoch keine Bewertungen
- Hoja para Calculos Sesión 3 SMV VERANODokument22 SeitenHoja para Calculos Sesión 3 SMV VERANOBrando Bao CruzattiNoch keine Bewertungen
- 5 Modelos de Carta de Renuncia Voluntaria ActualizadosDokument12 Seiten5 Modelos de Carta de Renuncia Voluntaria ActualizadosWalterGrillet67% (3)
- Cuestionario Cap 5Dokument3 SeitenCuestionario Cap 5Jacome MonserrathNoch keine Bewertungen
- Interpretacion TopograficaDokument14 SeitenInterpretacion TopograficaCESAR BUITRAGO RUIZNoch keine Bewertungen
- Es Zombicide Rulebook Fort Hendrix 8 Red Cor 1Dokument36 SeitenEs Zombicide Rulebook Fort Hendrix 8 Red Cor 1edgar alejandro monroyNoch keine Bewertungen
- Caso Esqueletos en El ArmarioDokument2 SeitenCaso Esqueletos en El ArmarioAlejandra Contreras0% (1)
- 2018-1 Guia1. Manejo de Instrumentos de MediciónDokument3 Seiten2018-1 Guia1. Manejo de Instrumentos de MediciónMiguel Angel Muñoz NopeNoch keine Bewertungen