Das könnte Ihnen auch gefallen
- Chapter3 - Basic Processing UnitDokument38 SeitenChapter3 - Basic Processing UnitFayiza beegamNoch keine Bewertungen
- Coa-3 0Dokument48 SeitenCoa-3 0JaiNoch keine Bewertungen
- Hamacher Ch7 MicroarchitectureDokument47 SeitenHamacher Ch7 MicroarchitectureMILIND ADHAULYANoch keine Bewertungen
- Chapter3 - Basic Processing UnitDokument47 SeitenChapter3 - Basic Processing UnitPraveen AlapatiNoch keine Bewertungen
- Chapter 7. Basic Processing UnitDokument47 SeitenChapter 7. Basic Processing Unit1DA19ME126 VARUN RNoch keine Bewertungen
- Unit III - Basic Processing UnitDokument123 SeitenUnit III - Basic Processing UnitKavitha RNoch keine Bewertungen
- Basic Processing Unit Basic Processing UnitDokument24 SeitenBasic Processing Unit Basic Processing UnitSNEHA MARIYA TOMNoch keine Bewertungen
- Basic Processing UnitDokument35 SeitenBasic Processing UnitAkhilNoch keine Bewertungen
- Unit 3 Basic Processing UnitDokument86 SeitenUnit 3 Basic Processing UnitRishitNoch keine Bewertungen
- Unit 2-Basic Processing UnitDokument95 SeitenUnit 2-Basic Processing UnitAkhilNoch keine Bewertungen
- Basic Processing UnitDokument35 SeitenBasic Processing UnitPinky BhaiNoch keine Bewertungen
- Chapter 7 Basic Processing UnitDokument58 SeitenChapter 7 Basic Processing UnitRoopa B SNoch keine Bewertungen
- Unit - Vi: Some Fundamental ConceptsDokument46 SeitenUnit - Vi: Some Fundamental ConceptsShwetaNoch keine Bewertungen
- 2-Module 3 Datapath Single Multiple Part 2Dokument28 Seiten2-Module 3 Datapath Single Multiple Part 2Lalala LandNoch keine Bewertungen
- Basic Processing Unit: Chapter ObjectivesDokument31 SeitenBasic Processing Unit: Chapter ObjectivesBhavanaNoch keine Bewertungen
- Basic Processing Unit: Chapter ObjectivesDokument20 SeitenBasic Processing Unit: Chapter ObjectivesRamsankar HazraNoch keine Bewertungen
- Computer Organization and Architecture - Basic Processing Unit (Module 5)Dokument76 SeitenComputer Organization and Architecture - Basic Processing Unit (Module 5)Shrishail BhatNoch keine Bewertungen
- Basic Processing Unit: Chapter ObjectivesDokument31 SeitenBasic Processing Unit: Chapter ObjectiveslucasNoch keine Bewertungen
- Coa Unit Iii FinalDokument141 SeitenCoa Unit Iii Finalvansh pundirNoch keine Bewertungen
- Chapter 7 Basic Processing UnitDokument58 SeitenChapter 7 Basic Processing UnitRoopa B SNoch keine Bewertungen
- Cao Unit-3 PDFDokument50 SeitenCao Unit-3 PDF99210041598Noch keine Bewertungen
- Kuliah - 12 - Basic ProcessingDokument15 SeitenKuliah - 12 - Basic ProcessingsharingdpdNoch keine Bewertungen
- Chapter3 - Basic Processing UnitDokument47 SeitenChapter3 - Basic Processing UnitKaruppanan KomathyNoch keine Bewertungen
- Processor Organization: Module-3 Part-2Dokument88 SeitenProcessor Organization: Module-3 Part-2Khushi MahawarNoch keine Bewertungen
- Execution of Complete InstructionDokument32 SeitenExecution of Complete Instructiontanishqshukla17pixelNoch keine Bewertungen
- (Advanced) Computer Architechture Prof. Dr. Hasan Hüseyin BALIK (3 Week)Dokument47 Seiten(Advanced) Computer Architechture Prof. Dr. Hasan Hüseyin BALIK (3 Week)فقد الاحبه غربةNoch keine Bewertungen
- Anjuman College of Engineering & Technology: Part II. Basic Processing UnitDokument17 SeitenAnjuman College of Engineering & Technology: Part II. Basic Processing UnitAbinaya87Noch keine Bewertungen
- Design and Implementation of FPGA Based 32 Bit Floating Point Processor For DSP ApplicationDokument5 SeitenDesign and Implementation of FPGA Based 32 Bit Floating Point Processor For DSP ApplicationAzhar Yaseen N JNoch keine Bewertungen
- Basic Processing UnitDokument57 SeitenBasic Processing UnitHerambh DubeyNoch keine Bewertungen
- CPU - Organisation - Sir NotesDokument8 SeitenCPU - Organisation - Sir Notes69Sutanu MukherjeeNoch keine Bewertungen
- Computer Organisation-Unit - IIDokument28 SeitenComputer Organisation-Unit - IIHulk ManNoch keine Bewertungen
- Fundamental Concepts of BPUDokument16 SeitenFundamental Concepts of BPURam GaneshNoch keine Bewertungen
- Basic Processing UnitDokument45 SeitenBasic Processing UnitJoby PaulNoch keine Bewertungen
- Coa Lecture Unit 2Dokument82 SeitenCoa Lecture Unit 2Sumathy JayaramNoch keine Bewertungen
- ٣محاضرات أساسيات نضام الحاسوبDokument10 Seiten٣محاضرات أساسيات نضام الحاسوبmuazalamri2006Noch keine Bewertungen
- Introduction Part 2 - Lec 1Dokument58 SeitenIntroduction Part 2 - Lec 1Danu NimNoch keine Bewertungen
- Basic Processing UnitDokument22 SeitenBasic Processing Unitlingga tanuNoch keine Bewertungen
- Module 5Dokument7 SeitenModule 5cosmiclove7353Noch keine Bewertungen
- Computer Organization-Basic Processing UnitDokument48 SeitenComputer Organization-Basic Processing Unitwww.entcengg.com100% (2)
- Unit 3 CPU Organization 2019 UpdatedDokument39 SeitenUnit 3 CPU Organization 2019 UpdatedCHETAN SAHUNoch keine Bewertungen
- Execution of InstructionDokument60 SeitenExecution of InstructionKr RanjithNoch keine Bewertungen
- Vision de Alto Nivel Del Computador V5 PDFDokument52 SeitenVision de Alto Nivel Del Computador V5 PDFGARY DAVID TRUJILLO MOTATO100% (1)
- Computer Organization and ArchitectureDokument173 SeitenComputer Organization and ArchitecturesalithakkNoch keine Bewertungen
- Lab 7 PDFDokument9 SeitenLab 7 PDFLeonardo FuchsNoch keine Bewertungen
- Chapter 7 - Basic Processing UnitDokument47 SeitenChapter 7 - Basic Processing UnitMayur Patankar0% (1)
- Computer Architecture: Fasih Ur RehmanDokument21 SeitenComputer Architecture: Fasih Ur Rehmansathya priyaNoch keine Bewertungen
- COA UNIT - III Processor and Control UnitDokument127 SeitenCOA UNIT - III Processor and Control UnitDevika csbsNoch keine Bewertungen
- EE16604 - EMBEDDED Systems: Handled by V.Mohanraj AP/EEEDokument40 SeitenEE16604 - EMBEDDED Systems: Handled by V.Mohanraj AP/EEEsachin zerefNoch keine Bewertungen
- A-Level Answer Sheet - 01 Computer ArchitectureDokument9 SeitenA-Level Answer Sheet - 01 Computer ArchitectureMugerwa CharlesNoch keine Bewertungen
- Microprocessor Based Systems: Lecture No 03 Introduction To Von Neumann ArchitectureDokument32 SeitenMicroprocessor Based Systems: Lecture No 03 Introduction To Von Neumann ArchitectureMuhammad ZubairNoch keine Bewertungen
- BCS302 DDCO Module 5 - Notes-ArunaDokument15 SeitenBCS302 DDCO Module 5 - Notes-Aruna253Noch keine Bewertungen
- Control Unit Design Teach 6th May 21Dokument27 SeitenControl Unit Design Teach 6th May 21niNoch keine Bewertungen
- Module 5Dokument58 SeitenModule 5gjtuyNoch keine Bewertungen
- 07BusTransfer7Dokument11 Seiten07BusTransfer7rashmiNoch keine Bewertungen
- Register Transfer and Microoperations2017-3-5Dokument21 SeitenRegister Transfer and Microoperations2017-3-5abenezer g/kirstosNoch keine Bewertungen
- Chapter 7 Notes Computer OrganizationDokument20 SeitenChapter 7 Notes Computer OrganizationsriNoch keine Bewertungen
- Design and Implementation of A SHARC Digital Signal Processor Core in Verilog HDLDokument6 SeitenDesign and Implementation of A SHARC Digital Signal Processor Core in Verilog HDLAhmed HamoudaNoch keine Bewertungen
- Basic Digital Signal Processing: Butterworths Basic SeriesVon EverandBasic Digital Signal Processing: Butterworths Basic SeriesBewertung: 5 von 5 Sternen5/5 (1)
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Von EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Noch keine Bewertungen
- 8051 For Embedded System.Dokument38 Seiten8051 For Embedded System.gurprit de riviaNoch keine Bewertungen
- Computer Organization and Architecture: Web Course Developed For NPTELDokument610 SeitenComputer Organization and Architecture: Web Course Developed For NPTELSaransh TewariNoch keine Bewertungen
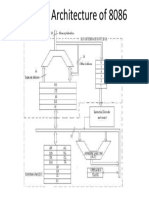
- Internal Architecture of 8086Dokument1 SeiteInternal Architecture of 8086gurprit de riviaNoch keine Bewertungen
- 8086 DatasheetDokument30 Seiten8086 Datasheetshailendrasingh20% (1)
- Chapter 9 - Computer Design BasicsDokument15 SeitenChapter 9 - Computer Design BasicsBekir GülerNoch keine Bewertungen
- Atmel Avr Xmega DDokument309 SeitenAtmel Avr Xmega DRyosuke RaijiNoch keine Bewertungen
- Computer Architecture Prof. Madhu Mutyam Department of Computer Science and Engineering Indian Institute of Technology, MadrasDokument10 SeitenComputer Architecture Prof. Madhu Mutyam Department of Computer Science and Engineering Indian Institute of Technology, MadrasElisée NdjabuNoch keine Bewertungen
- Introduction To Computer Science: Ryan StansiferDokument143 SeitenIntroduction To Computer Science: Ryan StansiferZareen KhanNoch keine Bewertungen
- Computer Architecture: Chapter # 05Dokument7 SeitenComputer Architecture: Chapter # 05Samiullah FazalNoch keine Bewertungen
- Cse1003 Digital-logic-And-Design Eth 1.1 47 Cse1003Dokument8 SeitenCse1003 Digital-logic-And-Design Eth 1.1 47 Cse1003Shiva Charan0% (1)
- Lecture 17 PDFDokument11 SeitenLecture 17 PDFattiqueNoch keine Bewertungen
- Introduction To 8086 MicroprocessorDokument13 SeitenIntroduction To 8086 MicroprocessorVijay Arunagiri ANoch keine Bewertungen
- Module 5Dokument58 SeitenModule 5gjtuyNoch keine Bewertungen
- List of 230+ Most Repeated Nts Test Mcqs With AnswersDokument19 SeitenList of 230+ Most Repeated Nts Test Mcqs With AnswersNOOR-E-ISLAM 786Noch keine Bewertungen
- L-1 Introductionto Computer - PPSXDokument35 SeitenL-1 Introductionto Computer - PPSXMohitSharmaNoch keine Bewertungen
- Basic NotesDokument118 SeitenBasic Notesapi-328892642Noch keine Bewertungen
- Computer Science Project Work Grade 11 HSEB NOTESDokument46 SeitenComputer Science Project Work Grade 11 HSEB NOTESjay sambooNoch keine Bewertungen
- Computer FundamentalsDokument818 SeitenComputer FundamentalsAnantha Krishna K SNoch keine Bewertungen
- Cs 341 Lecture1Dokument11 SeitenCs 341 Lecture1luckyNoch keine Bewertungen
- RAM and ROM Haardware SoftwareDokument3 SeitenRAM and ROM Haardware SoftwareFilza FatimaNoch keine Bewertungen
- VLSI Lab ManualDokument106 SeitenVLSI Lab Manualtmuthu123Noch keine Bewertungen
- CSO Lecture Notes Unit-1Dokument33 SeitenCSO Lecture Notes Unit-1Naman PatidarNoch keine Bewertungen
- Class 1-Introduction To Microprocessor PDFDokument36 SeitenClass 1-Introduction To Microprocessor PDFDeepika AgrawalNoch keine Bewertungen
- Fit 1Dokument55 SeitenFit 1ashishsharmapanditNoch keine Bewertungen
- Reserved: Basic Structure of Computers and Instruction SetDokument20 SeitenReserved: Basic Structure of Computers and Instruction SetJuanNoch keine Bewertungen
- AluDokument10 SeitenAluAbhishek PatraNoch keine Bewertungen
- Computer-Architecture 1 PDFDokument0 SeitenComputer-Architecture 1 PDFwww.bhawesh.com.npNoch keine Bewertungen
- Chapter # 1: Fundamentals of ComputerDokument22 SeitenChapter # 1: Fundamentals of ComputerMansoor AhmedNoch keine Bewertungen
- PIC16F526Dokument122 SeitenPIC16F526Michael GardnerNoch keine Bewertungen
- RinkiDokument4 SeitenRinkiRinki SoniNoch keine Bewertungen
- Unit 4 The Control Unit: Structure NoDokument18 SeitenUnit 4 The Control Unit: Structure NoanikhetNoch keine Bewertungen
- Chapter 1 Introduction To Computer Organization and ArchitectureDokument58 SeitenChapter 1 Introduction To Computer Organization and ArchitectureDesyilalNoch keine Bewertungen
- High Performance, Low Cost Microprocessor (US Patent 5530890)Dokument49 SeitenHigh Performance, Low Cost Microprocessor (US Patent 5530890)PriorSmartNoch keine Bewertungen