Das könnte Ihnen auch gefallen
- M2 2019 Parametric Equations Lecture Notes For SLSDokument13 SeitenM2 2019 Parametric Equations Lecture Notes For SLScoyite8695Noch keine Bewertungen
- Inverse KinematicsDokument64 SeitenInverse KinematicsHoney RathoreNoch keine Bewertungen
- Sol of Practice Questions Lectures 29-31Dokument8 SeitenSol of Practice Questions Lectures 29-31Juni KhanNoch keine Bewertungen
- Answer ALL 4 Questions Time Allowed: 1 HourDokument6 SeitenAnswer ALL 4 Questions Time Allowed: 1 HourRavi VarmanNoch keine Bewertungen
- Hull OFOD11 e Solutions CH 31Dokument7 SeitenHull OFOD11 e Solutions CH 31Park GeunhyeNoch keine Bewertungen
- Line Integrals 1Dokument27 SeitenLine Integrals 1aayangreatgreatNoch keine Bewertungen
- Inverse Kinematics-3Dokument51 SeitenInverse Kinematics-3Nahom AlemnewNoch keine Bewertungen
- CurvesDokument61 SeitenCurvesRajesh RockyNoch keine Bewertungen
- Solution of Homework #3Dokument6 SeitenSolution of Homework #3丁偉庭Noch keine Bewertungen
- Lect5 Line IntegralDokument66 SeitenLect5 Line IntegralOmed. HNoch keine Bewertungen
- Solution Exercise (Line Integrals)Dokument12 SeitenSolution Exercise (Line Integrals)iffatul mahyaNoch keine Bewertungen
- Position Kinematics: We Choose The Robot Fish Has 3 Joints and 3 LinksDokument12 SeitenPosition Kinematics: We Choose The Robot Fish Has 3 Joints and 3 LinksminhkhoaNoch keine Bewertungen
- SBBSBDokument25 SeitenSBBSBHelloNoch keine Bewertungen
- Chapter3b Matrices 28ero - Determinant 29Dokument42 SeitenChapter3b Matrices 28ero - Determinant 29sujjashriNoch keine Bewertungen
- 05-Inverse Manipulator Kinematics: Doan The ThaoDokument47 Seiten05-Inverse Manipulator Kinematics: Doan The ThaoThảo DươngNoch keine Bewertungen
- Integral GarisDokument13 SeitenIntegral GarisrakhaaditNoch keine Bewertungen
- Clase 10 Calculo Numerico IDokument26 SeitenClase 10 Calculo Numerico ICarlos AlmanzaNoch keine Bewertungen
- CST Problem PDFDokument11 SeitenCST Problem PDFgauthamNoch keine Bewertungen
- JEEmain 26 Augshift 1Dokument53 SeitenJEEmain 26 Augshift 1Nirmala GutamNoch keine Bewertungen
- Chapter 5 FrenchDokument70 SeitenChapter 5 FrenchVaibhav SharmaNoch keine Bewertungen
- 2.2 Theory of Gaussian Elimination - Chapter 2Dokument10 Seiten2.2 Theory of Gaussian Elimination - Chapter 2Felicia IdajiliNoch keine Bewertungen
- Mobile Robotics Lecture No. 5Dokument72 SeitenMobile Robotics Lecture No. 5ZaidKhanNoch keine Bewertungen
- Chapter 4 PDFDokument11 SeitenChapter 4 PDF김채현Noch keine Bewertungen
- Gamma FunctionDokument14 SeitenGamma FunctionmohammedalielkhamissiNoch keine Bewertungen
- Aljabar Linier - MatriksDokument41 SeitenAljabar Linier - MatriksgibthaNoch keine Bewertungen
- 002 Stiffness MethodDokument55 Seiten002 Stiffness MethodAatif RiazNoch keine Bewertungen
- Chapter Review: X T y T X yDokument5 SeitenChapter Review: X T y T X ynasehaNoch keine Bewertungen
- Ma GMM: Review Exercises For Chapter 11Dokument9 SeitenMa GMM: Review Exercises For Chapter 11tadeitobelloNoch keine Bewertungen
- Introduction To Robotics (CS223A) Homework #3 Solution (Winter 2007/2008)Dokument5 SeitenIntroduction To Robotics (CS223A) Homework #3 Solution (Winter 2007/2008)علي كامل الاسديNoch keine Bewertungen
- 05-09-21 JR - Iit Star Co-Sc (Model-B) Jee Adv 2018 (P-I) Wat-18 Key & SolDokument8 Seiten05-09-21 JR - Iit Star Co-Sc (Model-B) Jee Adv 2018 (P-I) Wat-18 Key & SolIshita ReddyNoch keine Bewertungen
- SMA 1117 - Lec 8Dokument29 SeitenSMA 1117 - Lec 8LucasNoch keine Bewertungen
- Midterm 01Dokument3 SeitenMidterm 01UnknownNoch keine Bewertungen
- MatrixDokument34 SeitenMatrixRaj SahaNoch keine Bewertungen
- Finite Element Method (ME G512) Comprehensive Exam: Birla Institute of Technology & Science, Pilani - Hyderabad CampusDokument4 SeitenFinite Element Method (ME G512) Comprehensive Exam: Birla Institute of Technology & Science, Pilani - Hyderabad Campustarun saddhahaqNoch keine Bewertungen
- Set 3 AnswersDokument2 SeitenSet 3 AnswersPrince VegetaNoch keine Bewertungen
- Summer Semester 38/39: 2 2 3 (1) Find The Inverse of The Matrix 3 1 3 5 2 2Dokument4 SeitenSummer Semester 38/39: 2 2 3 (1) Find The Inverse of The Matrix 3 1 3 5 2 2Arwa AlabdulkarimNoch keine Bewertungen
- LA - 3. DeterminantsDokument29 SeitenLA - 3. Determinantscttinh0812Noch keine Bewertungen
- USNA Acoustics Notes - Chapter 1Dokument36 SeitenUSNA Acoustics Notes - Chapter 1NvlArchNoch keine Bewertungen
- Lec 33 - Householder MethodDokument11 SeitenLec 33 - Householder MethodMudit SinhaNoch keine Bewertungen
- Lecture07 NotesDokument4 SeitenLecture07 NoteschelseaNoch keine Bewertungen
- 2 D Transformation: Computer GraphicDokument43 Seiten2 D Transformation: Computer Graphicarup sarkerNoch keine Bewertungen
- LECTURE 4: Linear Least Squares Problem, Normal Equation and QR FactorizationDokument74 SeitenLECTURE 4: Linear Least Squares Problem, Normal Equation and QR FactorizationBilal AlderbashiNoch keine Bewertungen
- Cse - I-Engineering Mathematics I-L5Dokument40 SeitenCse - I-Engineering Mathematics I-L5Kuldeep G S SwamyNoch keine Bewertungen
- Determinants & Cramer'S RuleDokument32 SeitenDeterminants & Cramer'S RuleJia Hui TanNoch keine Bewertungen
- Problem 1Dokument3 SeitenProblem 1azoozNoch keine Bewertungen
- Ch-2.inverse DDokument18 SeitenCh-2.inverse Dchibssa alemayehuNoch keine Bewertungen
- 4.1 MatricesDokument5 Seiten4.1 MatricesAMSYARUL MARLIANA BT KHAIRUL ANUAR STUDENTNoch keine Bewertungen
- Section12 8notesDokument18 SeitenSection12 8noteskprk414Noch keine Bewertungen
- 1.09 Parametric Plotting Literacy: Tfrom0to2Dokument6 Seiten1.09 Parametric Plotting Literacy: Tfrom0to2Sri RaghavanNoch keine Bewertungen
- B. System of Linear Equation-HomogeneousDokument24 SeitenB. System of Linear Equation-HomogeneousPushkarNoch keine Bewertungen
- Lecture Notes (Chapter 2.4a Cylindrical Coordinate)Dokument6 SeitenLecture Notes (Chapter 2.4a Cylindrical Coordinate)Hafzal GaniNoch keine Bewertungen
- Self-Study Review (Chapter B) : Z X Jy (Cartesian Form)Dokument3 SeitenSelf-Study Review (Chapter B) : Z X Jy (Cartesian Form)ashaw002Noch keine Bewertungen
- 24.3.6 - Variation of Parameters Second OrderDokument11 Seiten24.3.6 - Variation of Parameters Second Orderanon_422073337Noch keine Bewertungen
- Specialist Maths: Calculus Week 2Dokument32 SeitenSpecialist Maths: Calculus Week 2Jess PeraltaNoch keine Bewertungen
- C1 Applied Linear AlgebraDokument24 SeitenC1 Applied Linear AlgebraQuynh-AnhNoch keine Bewertungen
- Bezier Curves and SurfacesDokument10 SeitenBezier Curves and SurfacesAniruddho RayNoch keine Bewertungen
- Week 4Dokument52 SeitenWeek 4Finto RaphelNoch keine Bewertungen
- Bachelor of Arts in Theology: Christian Apologetics/ Seventh-Day Adventist Contemporary IssuesDokument13 SeitenBachelor of Arts in Theology: Christian Apologetics/ Seventh-Day Adventist Contemporary IssuesRamel LigueNoch keine Bewertungen
- Catify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Dokument315 SeitenCatify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Paz Libros100% (2)
- Miguel Augusto Ixpec-Chitay, A097 535 400 (BIA Sept. 16, 2013)Dokument22 SeitenMiguel Augusto Ixpec-Chitay, A097 535 400 (BIA Sept. 16, 2013)Immigrant & Refugee Appellate Center, LLCNoch keine Bewertungen
- Antena TelnetDokument4 SeitenAntena TelnetMarco PiambaNoch keine Bewertungen
- ყვავილები ელჯერნონისთვისDokument348 Seitenყვავილები ელჯერნონისთვისNia NorakidzeNoch keine Bewertungen
- Aluminum PorterDokument2 SeitenAluminum PorterAmir ShameemNoch keine Bewertungen
- Advanced Chemical Engineering Thermodynamics (Cheg6121) : Review of Basic ThermodynamicsDokument74 SeitenAdvanced Chemical Engineering Thermodynamics (Cheg6121) : Review of Basic ThermodynamicsetayhailuNoch keine Bewertungen
- Lecture 2 Effects of Operating Conditions in VCCDokument9 SeitenLecture 2 Effects of Operating Conditions in VCCDeniell Joyce MarquezNoch keine Bewertungen
- Pg2022 ResultDokument86 SeitenPg2022 ResultkapilNoch keine Bewertungen
- Z-Purlins: Technical DocumentationDokument11 SeitenZ-Purlins: Technical Documentationardit bedhiaNoch keine Bewertungen
- Triaxial Shear TestDokument10 SeitenTriaxial Shear TestAfiqah Nu'aimiNoch keine Bewertungen
- Clockwork Dragon's Expanded ArmoryDokument13 SeitenClockwork Dragon's Expanded Armoryabel chabanNoch keine Bewertungen
- Inside:: Issue 4 - February 2004 Bi-Monthly Warhammer E-ZineDokument40 SeitenInside:: Issue 4 - February 2004 Bi-Monthly Warhammer E-ZineJoe BloggsNoch keine Bewertungen
- Produktkatalog SmitsvonkDokument20 SeitenProduktkatalog Smitsvonkomar alnasserNoch keine Bewertungen
- Durex 'S Marketing Strategy in VietnamDokument45 SeitenDurex 'S Marketing Strategy in VietnamPham Nguyen KhoiNoch keine Bewertungen
- Apple Change ManagementDokument31 SeitenApple Change ManagementimuffysNoch keine Bewertungen
- CL57T V4.0Dokument14 SeitenCL57T V4.0dimitriNoch keine Bewertungen
- MultiLoadII Mobile Quick Start PDFDokument10 SeitenMultiLoadII Mobile Quick Start PDFAndrés ColmenaresNoch keine Bewertungen
- Mechanical Production Engineer Samphhhhhle ResumeDokument2 SeitenMechanical Production Engineer Samphhhhhle ResumeAnirban MazumdarNoch keine Bewertungen
- Food ResourcesDokument20 SeitenFood ResourceshiranNoch keine Bewertungen
- Chapter 23Dokument9 SeitenChapter 23Javier Chuchullo TitoNoch keine Bewertungen
- Aleutia Solar Container ClassroomDokument67 SeitenAleutia Solar Container ClassroomaleutiaNoch keine Bewertungen
- Literatura Tecnica 3Dokument10 SeitenLiteratura Tecnica 3Christian PerezNoch keine Bewertungen
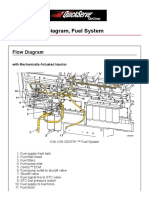
- Cummin C1100 Fuel System Flow DiagramDokument8 SeitenCummin C1100 Fuel System Flow DiagramDaniel KrismantoroNoch keine Bewertungen
- How To Configure PowerMACS 4000 As A PROFINET IO Slave With Siemens S7Dokument20 SeitenHow To Configure PowerMACS 4000 As A PROFINET IO Slave With Siemens S7kukaNoch keine Bewertungen
- 2011-2012 - Medical - DirectoryDokument112 Seiten2011-2012 - Medical - DirectoryЈелена КошевићNoch keine Bewertungen
- Canon Powershot S50 Repair Manual (CHAPTER 4. PARTS CATALOG) PDFDokument13 SeitenCanon Powershot S50 Repair Manual (CHAPTER 4. PARTS CATALOG) PDFRita CaselliNoch keine Bewertungen
- Week-3-Q1-Gen Chem-Sep-11-15-DllDokument12 SeitenWeek-3-Q1-Gen Chem-Sep-11-15-DllJennette BelliotNoch keine Bewertungen
- Chapter 4 Achieving Clarity and Limiting Paragraph LengthDokument1 SeiteChapter 4 Achieving Clarity and Limiting Paragraph Lengthapi-550339812Noch keine Bewertungen
- Meno's Paradox of Inquiry and Socrates' Theory of RecollectionDokument10 SeitenMeno's Paradox of Inquiry and Socrates' Theory of RecollectionPhilip DarbyNoch keine Bewertungen