Das könnte Ihnen auch gefallen
- TheoryDokument42 SeitenTheoryMateescu Alexandra Mihaela100% (1)
- PCNSE - Study-GuideDokument366 SeitenPCNSE - Study-Guidedexonn100% (1)
- Radio Control for Model Ships, Boats and AircraftVon EverandRadio Control for Model Ships, Boats and AircraftBewertung: 5 von 5 Sternen5/5 (1)
- Hacking For Dummies - CheatsheetDokument3 SeitenHacking For Dummies - Cheatsheetdjtai87Noch keine Bewertungen
- MSP & SNCPDokument9 SeitenMSP & SNCPdebasis_mandal1100% (1)
- 7SJ62 Manual PDFDokument39 Seiten7SJ62 Manual PDFhotmit_86100% (3)
- Sonet Sdh-ProtectionDokument21 SeitenSonet Sdh-ProtectionVamsi KrishnaNoch keine Bewertungen
- Data Centre of FacebookDokument89 SeitenData Centre of FacebookNasira RanaNoch keine Bewertungen
- SDH and SonetDokument40 SeitenSDH and SonetSalim KhanNoch keine Bewertungen
- MiCOM IEDs For Process Bus - Experts 2012Dokument62 SeitenMiCOM IEDs For Process Bus - Experts 2012Jaka Sembung GolokNoch keine Bewertungen
- Annex 2a Solution Description TECH TCT-731-21Dokument46 SeitenAnnex 2a Solution Description TECH TCT-731-21Đức HuyNoch keine Bewertungen
- SDH ProtectionDokument6 SeitenSDH Protectionzylyz71% (7)
- CISA Exam - Testing Concept-Network Physical Media (Fiber Optic/ UTP/STP/Co-axial) (Domain-4)Von EverandCISA Exam - Testing Concept-Network Physical Media (Fiber Optic/ UTP/STP/Co-axial) (Domain-4)Noch keine Bewertungen
- SNCP ProtectionDokument6 SeitenSNCP Protectionhekri100% (2)
- K1-K2 ByteDokument6 SeitenK1-K2 ByteSwapnil PatilNoch keine Bewertungen
- Protection APSDokument71 SeitenProtection APSNetaxion CelularNoch keine Bewertungen
- ProtectionDokument70 SeitenProtectionkcpthomasNoch keine Bewertungen
- ProtectionDokument79 SeitenProtectionAhmad TaheriNoch keine Bewertungen
- Automatic Protection SwitchingDokument79 SeitenAutomatic Protection Switchingm4_prashanthNoch keine Bewertungen
- Automatic Protection Switching: Yaakov (J) Stein CTO RAD Data CommunicationsDokument79 SeitenAutomatic Protection Switching: Yaakov (J) Stein CTO RAD Data CommunicationsStelian Iorgoveanu100% (1)
- WhitePaper-Measuring APS Disruption TimeDokument12 SeitenWhitePaper-Measuring APS Disruption TimeAyan ChakrabortyNoch keine Bewertungen
- Optical Networks Sonet & SDHDokument29 SeitenOptical Networks Sonet & SDHAnonymous 1rTtL4gEXNoch keine Bewertungen
- 6.protection & Diversity TechniquesDokument42 Seiten6.protection & Diversity TechniquesmumerbuttNoch keine Bewertungen
- NG Sdh/Ason: Developed & Delivered By: DR Muhammad Khalil Shahid Associate Professor, ICT, PTCL, IslamabadDokument242 SeitenNG Sdh/Ason: Developed & Delivered By: DR Muhammad Khalil Shahid Associate Professor, ICT, PTCL, IslamabadRai Riaz AhmadNoch keine Bewertungen
- A Simple ToolDokument16 SeitenA Simple Toolsrotenstein3114Noch keine Bewertungen
- Client 1+1 ProtectionDokument9 SeitenClient 1+1 ProtectionSery ArthurNoch keine Bewertungen
- Client ProtectionDokument20 SeitenClient ProtectionSery ArthurNoch keine Bewertungen
- Synchronizing Network Elements On SONET/ SDH Rings: Ullas KumarDokument4 SeitenSynchronizing Network Elements On SONET/ SDH Rings: Ullas KumarSachin GoyalNoch keine Bewertungen
- SNCPDokument5 SeitenSNCPanon_884984388Noch keine Bewertungen
- SDH ProtectionDokument46 SeitenSDH Protectionapi-3806249100% (8)
- FullPaperSNI2004 Hardi N-EvaluasiSisProteksiSDHDokument8 SeitenFullPaperSNI2004 Hardi N-EvaluasiSisProteksiSDHYudo Heru PribadiNoch keine Bewertungen
- Line Differential Relay 7SD52Dokument17 SeitenLine Differential Relay 7SD52Anonymous 9VcxlFErfNoch keine Bewertungen
- Optical Transport Network (OTN) ODUk Shared Protection RingDokument5 SeitenOptical Transport Network (OTN) ODUk Shared Protection Ringhas samNoch keine Bewertungen
- CSC-121 Breaker Protection IED Product Guide (0SF.492.053E) - V1.10Dokument58 SeitenCSC-121 Breaker Protection IED Product Guide (0SF.492.053E) - V1.10melchor olarioNoch keine Bewertungen
- Provisioning Protection Switching Module: PSM CardDokument6 SeitenProvisioning Protection Switching Module: PSM CardRizwan SultanNoch keine Bewertungen
- Siemens SIPROTEC 4 7SA6Dokument48 SeitenSiemens SIPROTEC 4 7SA6Cleber MachadoNoch keine Bewertungen
- 1:1 Bi-Directional Fiber Link Optical Protection Module: FunctionsDokument4 Seiten1:1 Bi-Directional Fiber Link Optical Protection Module: FunctionsRonaldo RomeroNoch keine Bewertungen
- Huawei Optix Osn 500 and Boards Datasheet PDFDokument11 SeitenHuawei Optix Osn 500 and Boards Datasheet PDFAnaPereaHernandezNoch keine Bewertungen
- Catalogo Familia PZ1000Dokument0 SeitenCatalogo Familia PZ1000jjcanoolivaresNoch keine Bewertungen
- Huawei Optix Osn 550 and Boards DatasheetDokument16 SeitenHuawei Optix Osn 550 and Boards DatasheetGuenane younes abd-allahNoch keine Bewertungen
- Basic Module of Microwave - EquipmentDokument13 SeitenBasic Module of Microwave - EquipmentSoe MyintNoch keine Bewertungen
- Distance Protection SimulationDokument5 SeitenDistance Protection Simulationkra_amNoch keine Bewertungen
- Working and Basic Concepts of Optical Line Protection Board OLPDokument2 SeitenWorking and Basic Concepts of Optical Line Protection Board OLPSery ArthurNoch keine Bewertungen
- 7sj61 Catalog Sip E7Dokument28 Seiten7sj61 Catalog Sip E7Жорж КаназирскиNoch keine Bewertungen
- Power System Protection 2-2022Dokument3 SeitenPower System Protection 2-2022Salah Mohammed SallamNoch keine Bewertungen
- Mobile Communications Chapter 7: Wireless LansDokument127 SeitenMobile Communications Chapter 7: Wireless Lansramadevi1092Noch keine Bewertungen
- O9500r - SDHDokument30 SeitenO9500r - SDHRidzky AryaNoch keine Bewertungen
- Fiber Protection Unit: XTM SeriesDokument3 SeitenFiber Protection Unit: XTM SeriesJacob WilkersonNoch keine Bewertungen
- Service Restoration in Switched Ethernet Networks: The Network NeedDokument8 SeitenService Restoration in Switched Ethernet Networks: The Network Needeliteshilpa1988Noch keine Bewertungen
- CSC-103 Line Protection IED Product Guide (0SF.492.051E) - V1.10Dokument70 SeitenCSC-103 Line Protection IED Product Guide (0SF.492.051E) - V1.10missle2007Noch keine Bewertungen
- SDH BasicsDokument72 SeitenSDH Basicsk_muange897Noch keine Bewertungen
- 5.2 Interface Board - ML1D BoardDokument24 Seiten5.2 Interface Board - ML1D BoardNomaan MalikNoch keine Bewertungen
- Protection SwitchingDokument14 SeitenProtection SwitchingpratiharmukeshNoch keine Bewertungen
- APN-044 Line Differential Protection in MPLS Based NetworksDokument14 SeitenAPN-044 Line Differential Protection in MPLS Based Networksgonzalo fernandezNoch keine Bewertungen
- 7SA522 Catalog SIP E6Dokument37 Seiten7SA522 Catalog SIP E6ronisatria08Noch keine Bewertungen
- Catalogo Siprotec 7sj80Dokument30 SeitenCatalogo Siprotec 7sj80Florencio TorresNoch keine Bewertungen
- The Study of SDH STM-1 Add-Drop Multiplexer ArchitectureDokument6 SeitenThe Study of SDH STM-1 Add-Drop Multiplexer ArchitectureRoberto Nicolas AlburquequeNoch keine Bewertungen
- Siprotec 4 7sa522 Distance Protection Relay For Transmission LinesDokument39 SeitenSiprotec 4 7sa522 Distance Protection Relay For Transmission LinesmanishNoch keine Bewertungen
- Loop-O9500R SDHSONET IMAP Datasheet PDFDokument34 SeitenLoop-O9500R SDHSONET IMAP Datasheet PDFJeffrey TanNoch keine Bewertungen
- Gain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipVon EverandGain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipNoch keine Bewertungen
- The Fourth Terminal: Benefits of Body-Biasing Techniques for FDSOI Circuits and SystemsVon EverandThe Fourth Terminal: Benefits of Body-Biasing Techniques for FDSOI Circuits and SystemsSylvain ClercNoch keine Bewertungen
- CCNA 200-301 - Lab-34 DHCP Snooping v1.0Dokument9 SeitenCCNA 200-301 - Lab-34 DHCP Snooping v1.0straloneNoch keine Bewertungen
- BTP-2002NP Feed Button Program Guide V2.0Dokument3 SeitenBTP-2002NP Feed Button Program Guide V2.0Hugo Martínez MooreNoch keine Bewertungen
- Consumer Electronics JUN16Dokument162 SeitenConsumer Electronics JUN16muradbuttNoch keine Bewertungen
- DAP-2660 A1 Manual v1.03 (WW)Dokument89 SeitenDAP-2660 A1 Manual v1.03 (WW)ggcbroNoch keine Bewertungen
- FH PlanningDokument68 SeitenFH PlanningwonypayukNoch keine Bewertungen
- MF/HF/VHF DSC Marine Radio Test System GuideDokument23 SeitenMF/HF/VHF DSC Marine Radio Test System GuideOmar RamírezNoch keine Bewertungen
- Ac Lab Manual-srs Ec-491Dokument92 SeitenAc Lab Manual-srs Ec-491ajclutchgodNoch keine Bewertungen
- Zscaler Guest Wi Fi ProtectionDokument2 SeitenZscaler Guest Wi Fi Protectionmohan1233Noch keine Bewertungen
- RJ45 Colors and Wiring Guide DiagramDokument3 SeitenRJ45 Colors and Wiring Guide DiagramElla CelineNoch keine Bewertungen
- Configuring Computer Systems & Networks GuideDokument91 SeitenConfiguring Computer Systems & Networks GuideBhem BoyNoch keine Bewertungen
- ONE 1424 XDokument2 SeitenONE 1424 XJulio C. Jordán A100% (1)
- Fortinet Transceivers PDFDokument5 SeitenFortinet Transceivers PDFbenyassNoch keine Bewertungen
- Nokia IP350-355 System DataSheetDokument2 SeitenNokia IP350-355 System DataSheetesetnod32Noch keine Bewertungen
- BRKSPG-2003-Nternet Peering Concepts and Emerging TrendsDokument65 SeitenBRKSPG-2003-Nternet Peering Concepts and Emerging TrendsNguyen Ngoc DuyNoch keine Bewertungen
- Link Layer: Computer Networking: A Top Down ApproachDokument35 SeitenLink Layer: Computer Networking: A Top Down ApproachChayon GhoshNoch keine Bewertungen
- This Study Resource Was: RD0449 - XXDokument2 SeitenThis Study Resource Was: RD0449 - XXDumitrescu GeorgeNoch keine Bewertungen
- Telnet: Discuss Telnet in DetailDokument27 SeitenTelnet: Discuss Telnet in DetailJayaprasannaNoch keine Bewertungen
- Passenger / Cargo Ship Safety Radio Equipment (GMDSS)Dokument9 SeitenPassenger / Cargo Ship Safety Radio Equipment (GMDSS)Ngô Duy VũNoch keine Bewertungen
- Dns AcaidoparaDokument26 SeitenDns AcaidoparaSimara Dos SantosNoch keine Bewertungen
- Rajant LTE-Whitepaper 12062022Dokument12 SeitenRajant LTE-Whitepaper 12062022carlos.rosillo301Noch keine Bewertungen
- CE Efficiency Improvement For HSUPA TTI 2ms (RAN16.0 - 01)Dokument28 SeitenCE Efficiency Improvement For HSUPA TTI 2ms (RAN16.0 - 01)hekriNoch keine Bewertungen
- TYDB 182020DEH4 33FT2v04Dokument1 SeiteTYDB 182020DEH4 33FT2v04Юлия АбоймоваNoch keine Bewertungen
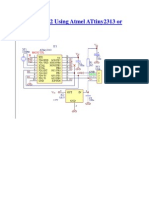
- USB to RS232 Converter Using Atmel MicrocontrollersDokument4 SeitenUSB to RS232 Converter Using Atmel Microcontrollersmikcomi100% (1)
- Examples of Modern TechnologyDokument4 SeitenExamples of Modern TechnologyEricka Pallon CamayudoNoch keine Bewertungen
- Configuracion Cantv para Modem Tp-Link TD-8816Dokument1 SeiteConfiguracion Cantv para Modem Tp-Link TD-8816Frank MontillaNoch keine Bewertungen
- Making Good Apps Great Expert TechniquesDokument73 SeitenMaking Good Apps Great Expert TechniquesSteinerOkNoch keine Bewertungen