Das könnte Ihnen auch gefallen
- MES ManualDokument122 SeitenMES ManualDenis AlfinNoch keine Bewertungen
- Common Rail Systems by LiebherrDokument24 SeitenCommon Rail Systems by LiebherrHùng Phạm100% (2)
- Vinod Final Polyplex-1Dokument103 SeitenVinod Final Polyplex-1Fan of carry minatiNoch keine Bewertungen
- DC GeneratorDokument11 SeitenDC GeneratorTaha khan100% (1)
- DC Generator: Swetala, Emmanuel A 110Dokument48 SeitenDC Generator: Swetala, Emmanuel A 110Gerald EmmanuelNoch keine Bewertungen
- DC MachineDokument53 SeitenDC MachineBikash ParhNoch keine Bewertungen
- Electrical Machine 5 Compiled by Course Lecturer EngrDokument66 SeitenElectrical Machine 5 Compiled by Course Lecturer EngrJames JohnNoch keine Bewertungen
- DC MachinesDokument25 SeitenDC MachinesAbdallah EssamNoch keine Bewertungen
- Objectives:: Electric Generator. While A Machine That Converts Electrical Energy To MechanicalDokument16 SeitenObjectives:: Electric Generator. While A Machine That Converts Electrical Energy To MechanicalPlabbashyNoch keine Bewertungen
- Basic Construction and Working of A DC GeneratorDokument12 SeitenBasic Construction and Working of A DC GeneratorMaheedhar ReddyNoch keine Bewertungen
- Rotating Machines and Transformers Unit 2 DC GENERATOR CLASS NOTESDokument70 SeitenRotating Machines and Transformers Unit 2 DC GENERATOR CLASS NOTESSEDHURAJA SNoch keine Bewertungen
- Faraday's Laws of Electromagnetic InductionDokument31 SeitenFaraday's Laws of Electromagnetic InductionAbhishek MohiteNoch keine Bewertungen
- Basic Construction and Working of A DC GeneratorDokument15 SeitenBasic Construction and Working of A DC GeneratorAnonymous QcCCBsNoch keine Bewertungen
- Peee Notes Unit IIIDokument49 SeitenPeee Notes Unit IIIPujita JNoch keine Bewertungen
- DC GeneratorDokument35 SeitenDC GeneratorMohammed Jalaluddin RayeenNoch keine Bewertungen
- DC GeneratorDokument4 SeitenDC GeneratorAnmol MishraNoch keine Bewertungen
- Ei6402 - Electrical Machines: Unit I D.C. MachinesDokument30 SeitenEi6402 - Electrical Machines: Unit I D.C. MachinesDhanush BhaiNoch keine Bewertungen
- Unit-3 DC Machines IMP QuestionsDokument30 SeitenUnit-3 DC Machines IMP Questionskrishna Sai Atla VenkataNoch keine Bewertungen
- Lecture 1 and 2Dokument20 SeitenLecture 1 and 2Bonface weitaraNoch keine Bewertungen
- DC Generators-I PDFDokument29 SeitenDC Generators-I PDFPraneetha InumarthiNoch keine Bewertungen
- Experiment #2: University of The East - Caloocan College of EngineeringDokument9 SeitenExperiment #2: University of The East - Caloocan College of EngineeringCed DavidNoch keine Bewertungen
- Electrical Assignment 15-12-2018Dokument15 SeitenElectrical Assignment 15-12-2018Mudasir SahoNoch keine Bewertungen
- Notes For CIA-IIDokument15 SeitenNotes For CIA-IIhariNoch keine Bewertungen
- DC MachineDokument94 SeitenDC MachineyazdanieNoch keine Bewertungen
- DC GeneratorDokument12 SeitenDC Generatorumme salmaNoch keine Bewertungen
- DC Generator Part 1 (v2)Dokument28 SeitenDC Generator Part 1 (v2)jerome aricayosNoch keine Bewertungen
- DC Generator Part 1 (v2)Dokument28 SeitenDC Generator Part 1 (v2)goggo asdNoch keine Bewertungen
- Unit 2Dokument25 SeitenUnit 2Dr.Sakthivel SNoch keine Bewertungen
- Basic Operation and Constructional Features of A DC Machine AreDokument28 SeitenBasic Operation and Constructional Features of A DC Machine AreBrijesh PrasadNoch keine Bewertungen
- Module 4 Updated 23-24Dokument22 SeitenModule 4 Updated 23-24Ayush RajNoch keine Bewertungen
- Unit IIIDokument9 SeitenUnit IIIhariNoch keine Bewertungen
- BEE R20 - Unit-1 (Ref-3)Dokument14 SeitenBEE R20 - Unit-1 (Ref-3)Dhanush 413Noch keine Bewertungen
- DcmachineDokument54 SeitenDcmachineRoyal Ritesh SharmaNoch keine Bewertungen
- 2 - UNIT II NotesDokument18 Seiten2 - UNIT II NotesRubiniNoch keine Bewertungen
- DC GeneratorDokument31 SeitenDC GeneratorMd Rasheduzzaman Al-AminNoch keine Bewertungen
- Basic Principles of Machine OperationDokument94 SeitenBasic Principles of Machine OperationRashmi SharmaNoch keine Bewertungen
- DC GeneratorDokument16 SeitenDC GeneratorSK MD WALI ULLAH BULONNoch keine Bewertungen
- Module 3-1Dokument53 SeitenModule 3-1anishdeshmukh108Noch keine Bewertungen
- ELECTRICAL MACHINES NOTEBOOK (Repaired)Dokument50 SeitenELECTRICAL MACHINES NOTEBOOK (Repaired)Madelo, Allysa Mae, M.Noch keine Bewertungen
- Unit IiDokument25 SeitenUnit Iistoryteller9059517061Noch keine Bewertungen
- Cem AssDokument13 SeitenCem AssHarshdeep SinghNoch keine Bewertungen
- DC MotorsDokument25 SeitenDC MotorsBruceNoch keine Bewertungen
- BRP Bee Module 4Dokument16 SeitenBRP Bee Module 4priyaNoch keine Bewertungen
- Microsoft Word - Notes On DC GeneratorDokument40 SeitenMicrosoft Word - Notes On DC GeneratorDr. Deepika YadavNoch keine Bewertungen
- Module5 231030 112440Dokument54 SeitenModule5 231030 112440PrathamNoch keine Bewertungen
- Unit I Generator and Motor - 11Dokument32 SeitenUnit I Generator and Motor - 11Bharani100% (1)
- Electrical Aparatus Group ActivityDokument8 SeitenElectrical Aparatus Group ActivityJohnLoyd DYNoch keine Bewertungen
- DC Machine L01Dokument11 SeitenDC Machine L01luckyNoch keine Bewertungen
- Energy Conversion 1Dokument74 SeitenEnergy Conversion 1sinusah5678Noch keine Bewertungen
- Be8253 - Unit 3Dokument25 SeitenBe8253 - Unit 3balajiNoch keine Bewertungen
- DC MachineDokument3 SeitenDC MachineKantharaj ChinnappaNoch keine Bewertungen
- Unit-Ii Electrical MachinesDokument22 SeitenUnit-Ii Electrical MachinesAmritha VNoch keine Bewertungen
- ELEMEE Module Week 9Dokument10 SeitenELEMEE Module Week 9Frances GalangNoch keine Bewertungen
- Report in Eng Conv DocuDokument5 SeitenReport in Eng Conv DocuRex Albert TejadillaNoch keine Bewertungen
- Unit 2 - BeeieDokument47 SeitenUnit 2 - BeeieKarthick Sivakumar ChellamuthuNoch keine Bewertungen
- Mapua Ee153 Q1 Sir ChuaDokument4 SeitenMapua Ee153 Q1 Sir ChuaNamer NoNoch keine Bewertungen
- Unit 2 D.C. MachinesDokument33 SeitenUnit 2 D.C. MachinesnandhakumarmeNoch keine Bewertungen
- Module IIIDokument66 SeitenModule IIIUtkarsh ShuklaNoch keine Bewertungen
- DC Machines: Recap of Last Lecture Lorentz Force Law DC Motor FundamentalsDokument29 SeitenDC Machines: Recap of Last Lecture Lorentz Force Law DC Motor FundamentalsStefan ReyNoch keine Bewertungen
- Applications of Electromagnetic InductionDokument6 SeitenApplications of Electromagnetic InductionAdeniji OlusegunNoch keine Bewertungen
- BEE R20 - Unit-1 (Ref-2)Dokument44 SeitenBEE R20 - Unit-1 (Ref-2)Dhanush 413Noch keine Bewertungen
- DC MotorDokument61 SeitenDC MotorMohammed Jalaluddin RayeenNoch keine Bewertungen
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsVon EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNoch keine Bewertungen
- MONTZ Main Cataloque PDFDokument69 SeitenMONTZ Main Cataloque PDFswaminathanNoch keine Bewertungen
- Fayat Activity Report 2020 - en - Page by Page - Low Resolution - 0Dokument44 SeitenFayat Activity Report 2020 - en - Page by Page - Low Resolution - 0arlyNoch keine Bewertungen
- 3rd Reviewer - Grade 6Dokument13 Seiten3rd Reviewer - Grade 6Joseph Bryan VictoriaNoch keine Bewertungen
- 5456 de Filter PressDokument6 Seiten5456 de Filter PressmbhadelNoch keine Bewertungen
- AMSOIL European Motor - 5W40Dokument2 SeitenAMSOIL European Motor - 5W40Rafael Canizares ChiarandiNoch keine Bewertungen
- Matbal 001H Flowsheet CycloHexaneDokument29 SeitenMatbal 001H Flowsheet CycloHexaneRizky AnugrahNoch keine Bewertungen
- Asco TORRCO 00537 CatalogDokument78 SeitenAsco TORRCO 00537 CatalogBrion Bara IndonesiaNoch keine Bewertungen
- TGEL BatteryDokument4 SeitenTGEL BatteryharishwarreddyNoch keine Bewertungen
- CALEFACCION Combitronic - 22297Dokument20 SeitenCALEFACCION Combitronic - 22297AlbertoNoch keine Bewertungen
- Ipfest 2022 - Registration BookletDokument70 SeitenIpfest 2022 - Registration BookletMarojahan Benedict Efrata, S.TNoch keine Bewertungen
- Sungrow Hybrid SH5K-30 5kW Inverter ManualDokument154 SeitenSungrow Hybrid SH5K-30 5kW Inverter Manualraymknd gerard macarineNoch keine Bewertungen
- PWM Control IC: BM1P107FJDokument30 SeitenPWM Control IC: BM1P107FJArokiaraj RajNoch keine Bewertungen
- Zentech Jackup Rig Design R 550D PDFDokument8 SeitenZentech Jackup Rig Design R 550D PDFGiang Nguyen NinhNoch keine Bewertungen
- Human Tissues Structure, Function and LococationDokument4 SeitenHuman Tissues Structure, Function and Lococationxuxi dulNoch keine Bewertungen
- Maersk LDokument12 SeitenMaersk LAbhishek Kumar0% (1)
- IRF460 Hexfet Transistors THRU-HOLE (TO-204AA/AE) 500V, N-CHANNELDokument8 SeitenIRF460 Hexfet Transistors THRU-HOLE (TO-204AA/AE) 500V, N-CHANNELJoseph SantanaNoch keine Bewertungen
- ICE 160 230 0296 HammerDokument119 SeitenICE 160 230 0296 HammerRıfat BingülNoch keine Bewertungen
- Cho Loss Model Radial TurbineDokument13 SeitenCho Loss Model Radial TurbineNicolasNoch keine Bewertungen
- Nominate Authorised Holder Representative TemplateDokument4 SeitenNominate Authorised Holder Representative TemplatesaravananNoch keine Bewertungen
- 2D& 3D-Kate Susannah - Lindsay Sorin and Michelle Maranto-Option 2 - 22.03.23Dokument11 Seiten2D& 3D-Kate Susannah - Lindsay Sorin and Michelle Maranto-Option 2 - 22.03.23Miliausha KarimNoch keine Bewertungen
- Снимок экрана 2023-03-01 в 09.16.43Dokument48 SeitenСнимок экрана 2023-03-01 в 09.16.43Maksim ZolotarjovNoch keine Bewertungen
- Miller 652 and 812 Owners Manualo278aj - MilDokument44 SeitenMiller 652 and 812 Owners Manualo278aj - MilrobertoarellanocastiNoch keine Bewertungen
- Frame 2014C / 2024C Winding 6: Shunt Arep/PmgDokument4 SeitenFrame 2014C / 2024C Winding 6: Shunt Arep/PmgscribdledeeNoch keine Bewertungen
- Draft CRE Regulations 2019-pdf452019102100AM PDFDokument118 SeitenDraft CRE Regulations 2019-pdf452019102100AM PDFPurna AcharyaNoch keine Bewertungen
- OzoneDokument11 SeitenOzoneECRDNoch keine Bewertungen
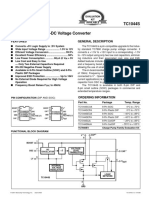
- TC1044S Charge Pump DC-TO-DC Voltage Converter: Features General DescriptionDokument11 SeitenTC1044S Charge Pump DC-TO-DC Voltage Converter: Features General DescriptionAlex Lorz BalboaNoch keine Bewertungen
- New Energy Technologies Issue 17Dokument100 SeitenNew Energy Technologies Issue 17blameitontherain9877100% (1)