Das könnte Ihnen auch gefallen
- Chapter 31ADokument43 SeitenChapter 31AHafidz HmaNoch keine Bewertungen
- Tables of Coulomb Wave Functions: Whittaker FunctionsVon EverandTables of Coulomb Wave Functions: Whittaker FunctionsNoch keine Bewertungen
- R(S) C(S)Dokument16 SeitenR(S) C(S)Ananthan SrijithNoch keine Bewertungen
- Bode PlotDokument38 SeitenBode PlotjaganathapandianNoch keine Bewertungen
- EMS507 Lecture 6 - Frequency AnalysisDokument23 SeitenEMS507 Lecture 6 - Frequency Analysis124ll124Noch keine Bewertungen
- Chapter-6slideDokument72 SeitenChapter-6slidehailegebreselassie24Noch keine Bewertungen
- 117919Dokument38 Seiten117919saravanan.9344308178Noch keine Bewertungen
- Chapter 6 SRDokument137 SeitenChapter 6 SRMadhusmita BarikNoch keine Bewertungen
- Tutorial 11Dokument25 SeitenTutorial 11Yang ElvisQUNoch keine Bewertungen
- Automatic Control II - Frequency ResponseDokument49 SeitenAutomatic Control II - Frequency Responseعبدالحميد أبوشينةNoch keine Bewertungen
- Chuong6 DLHDKDokument100 SeitenChuong6 DLHDKPhúc NguyễnNoch keine Bewertungen
- Unit-4-1 PPT CSDokument78 SeitenUnit-4-1 PPT CS20R25A0420 KONDAMUDI VAMSI ANURAGNoch keine Bewertungen
- Bode Plot Bds 26 3 2015 PDFDokument148 SeitenBode Plot Bds 26 3 2015 PDFNikhil PatwariNoch keine Bewertungen
- Chapter 14Dokument6 SeitenChapter 14李承家Noch keine Bewertungen
- Time Response PDFDokument104 SeitenTime Response PDFMeshach KumarNoch keine Bewertungen
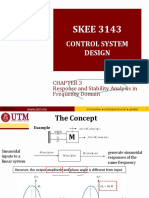
- Response and Stability Analysis in Frequency DomainDokument54 SeitenResponse and Stability Analysis in Frequency DomainMYNAMENoch keine Bewertungen
- Frequency ResponseDokument62 SeitenFrequency ResponseSujin PrajapatiNoch keine Bewertungen
- Frequency Response Method (Continue)Dokument37 SeitenFrequency Response Method (Continue)Edo SunardyNoch keine Bewertungen
- EE 312 Lecture 8Dokument15 SeitenEE 312 Lecture 8دكتور كونوهاNoch keine Bewertungen
- Lect 9-Frequency-Response-techniques 1Dokument68 SeitenLect 9-Frequency-Response-techniques 1Tarik ZiadNoch keine Bewertungen
- Transform-Domain Representation of Discrete-Time SignalsDokument93 SeitenTransform-Domain Representation of Discrete-Time SignalsIqra ImtiazNoch keine Bewertungen
- Chapter 09 Frequency Response MethodDokument62 SeitenChapter 09 Frequency Response MethodFatih TokgözNoch keine Bewertungen
- Control - System - Chapter 6 - 8EDokument51 SeitenControl - System - Chapter 6 - 8EE24089046林雯琪Noch keine Bewertungen
- Bode Plot - EC 502Dokument37 SeitenBode Plot - EC 502ajay meena100% (2)
- Online Control Lecture #2Dokument33 SeitenOnline Control Lecture #2Noor GamingNoch keine Bewertungen
- Prestige Institute of Engineering & Science Indore (M.P.)Dokument3 SeitenPrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNoch keine Bewertungen
- System Representation: - Where The Input Signal Is of Z-TransformDokument36 SeitenSystem Representation: - Where The Input Signal Is of Z-TransformPallavi NalawadeNoch keine Bewertungen
- Unit Iii Frequency ResponseDokument28 SeitenUnit Iii Frequency ResponseRaghu RamNoch keine Bewertungen
- Stability of LTI System BTech - Part-III-Freq Domain Analysis (Compatibility Mode)Dokument107 SeitenStability of LTI System BTech - Part-III-Freq Domain Analysis (Compatibility Mode)Akash RoyNoch keine Bewertungen
- The system is stableDokument48 SeitenThe system is stableJulcemar CapellaroNoch keine Bewertungen
- Feedback Control Systems: Lecture Notes-12/12Dokument10 SeitenFeedback Control Systems: Lecture Notes-12/12Aastha SinghNoch keine Bewertungen
- Freq ResponseDokument23 SeitenFreq Responselili aboudNoch keine Bewertungen
- (Preprint) AAS 13-213: Edwin S. Ahn, Richard W. Longman, and Jae J. KimDokument24 Seiten(Preprint) AAS 13-213: Edwin S. Ahn, Richard W. Longman, and Jae J. KimAyman IsmailNoch keine Bewertungen
- StabilityDokument6 SeitenStabilitysekinNoch keine Bewertungen
- Frequency Response Analysis Bode PlotsDokument76 SeitenFrequency Response Analysis Bode PlotsSudhanshu Singh0% (1)
- DKUT - CNTIII - Butterworth and Chebyshev Type I Filters - Guillemin's Algorithm NotesDokument23 SeitenDKUT - CNTIII - Butterworth and Chebyshev Type I Filters - Guillemin's Algorithm NotesmwangiNoch keine Bewertungen
- Freq Resp BodePlots Part1Dokument28 SeitenFreq Resp BodePlots Part1varasala sanjayNoch keine Bewertungen
- The DWT for Image CompressionDokument31 SeitenThe DWT for Image CompressionEmir BuzaNoch keine Bewertungen
- CH 1Dokument67 SeitenCH 1Hazril MahmudNoch keine Bewertungen
- Chapter 10-Frequency ResponseDokument67 SeitenChapter 10-Frequency Responseعمر الفهدNoch keine Bewertungen
- 08 Frequency Response Methods MechDokument21 Seiten08 Frequency Response Methods MechMamodiNoch keine Bewertungen
- T FN, Pole-Zeros, Block Diagram & SFGDokument28 SeitenT FN, Pole-Zeros, Block Diagram & SFGArsal AslamNoch keine Bewertungen
- Wavelets and Multi-Resolution ProcessingDokument31 SeitenWavelets and Multi-Resolution ProcessingsrichitsNoch keine Bewertungen
- ME 314 Chapter 5 HW SolutionDokument12 SeitenME 314 Chapter 5 HW Solutionsafin kaosarNoch keine Bewertungen
- Ms04-Impulsmom EngDokument34 SeitenMs04-Impulsmom EngtheBOATNoch keine Bewertungen
- Impulse Invariance and BilinearDokument8 SeitenImpulse Invariance and BilinearAnang MarufNoch keine Bewertungen
- Lec5 Wavelets and Multiresolution AnalysisDokument55 SeitenLec5 Wavelets and Multiresolution AnalysisRitunjay GuptaNoch keine Bewertungen
- Frequency Response Analysis: Section 6Dokument45 SeitenFrequency Response Analysis: Section 6Ahmed HassanNoch keine Bewertungen
- Instructions:: Gujarat Technological UniversityDokument3 SeitenInstructions:: Gujarat Technological UniversityJaineshNoch keine Bewertungen
- Fall 2010 Control Systems (EEE 226) Unit-3 Frequency Response Analysis Faculty: Ramesh Babu. NDokument40 SeitenFall 2010 Control Systems (EEE 226) Unit-3 Frequency Response Analysis Faculty: Ramesh Babu. NVijay IndukuriNoch keine Bewertungen
- Frequency Response Analysis of Linear Control SystemsDokument10 SeitenFrequency Response Analysis of Linear Control SystemsDilip GNoch keine Bewertungen
- IC6701 May 18 With KeyDokument14 SeitenIC6701 May 18 With KeyAnonymous yO7rcec6vuNoch keine Bewertungen
- The Discrete Wavelet Transform For Image CompressionDokument26 SeitenThe Discrete Wavelet Transform For Image CompressionRavinder Pal Singh HarryNoch keine Bewertungen
- Lect 9 Overall Transfer Function of A Closed-Loop Control SystemDokument8 SeitenLect 9 Overall Transfer Function of A Closed-Loop Control SystemZaidoon MohsinNoch keine Bewertungen
- Control Systems KuestionDokument39 SeitenControl Systems KuestionRose KayoNoch keine Bewertungen
- Lecture 20 Root Locus Introduction and DefinitionDokument21 SeitenLecture 20 Root Locus Introduction and DefinitionHamza KhanNoch keine Bewertungen
- Control Sol GA PDFDokument342 SeitenControl Sol GA PDFRishabh ShuklaNoch keine Bewertungen
- Fast Sketching of Nyquist Plot in Control Systems: S S S S S GHDokument13 SeitenFast Sketching of Nyquist Plot in Control Systems: S S S S S GHAnil Srikanth DowleswarapuNoch keine Bewertungen
- On A New Multivariate Sampling Paradigm and A Polyspline Shannon FunctionDokument23 SeitenOn A New Multivariate Sampling Paradigm and A Polyspline Shannon FunctionKounchevNoch keine Bewertungen
- Tutorials Sheet With ContentDokument2 SeitenTutorials Sheet With ContentAkula VeerrajuNoch keine Bewertungen
- Unit 3 - Electromagnetic & Static Relays PDFDokument94 SeitenUnit 3 - Electromagnetic & Static Relays PDFAkula VeerrajuNoch keine Bewertungen
- Institute of Aeronautical Engineering EEE Assignment on Electromagnetic FieldsDokument6 SeitenInstitute of Aeronautical Engineering EEE Assignment on Electromagnetic FieldsAkula VeerrajuNoch keine Bewertungen
- Emf CDFDokument6 SeitenEmf CDFAkula VeerrajuNoch keine Bewertungen
- A Comparison of IEC 479-1 and IEEE STD 80 On Grounding Safety CriteriaDokument10 SeitenA Comparison of IEC 479-1 and IEEE STD 80 On Grounding Safety CriteriaGohar AliNoch keine Bewertungen
- Setpoint TrackingDokument6 SeitenSetpoint TrackingNor Rochmad Hadi PNoch keine Bewertungen
- Control Systems Theory: Transfer Function of Physical Systems STB 35103Dokument108 SeitenControl Systems Theory: Transfer Function of Physical Systems STB 35103Akula Veerraju100% (1)
- Control Systems Theory: Reduction of Multiple Subsystems STB 35103Dokument45 SeitenControl Systems Theory: Reduction of Multiple Subsystems STB 35103Akula VeerrajuNoch keine Bewertungen
- Controlchap4 131231194106 Phpapp01Dokument40 SeitenControlchap4 131231194106 Phpapp01Akula VeerrajuNoch keine Bewertungen
- State Variable AnalysisDokument6 SeitenState Variable AnalysisamritNoch keine Bewertungen
- SGP Unit 5Dokument46 SeitenSGP Unit 5Akula VeerrajuNoch keine Bewertungen
- Electrical DesignDokument4 SeitenElectrical DesignKrishna AdinaNoch keine Bewertungen
- MATLAB & SIMULINK CHAPTER 9 CONTROL SYSTEMS THEORYDokument23 SeitenMATLAB & SIMULINK CHAPTER 9 CONTROL SYSTEMS THEORYAkula Veerraju0% (1)
- SGP Unit 5Dokument46 SeitenSGP Unit 5Akula VeerrajuNoch keine Bewertungen
- SGP Unit 5Dokument5 SeitenSGP Unit 5Akula VeerrajuNoch keine Bewertungen
- Guide To The Wiring Regulations - Pdf.compressedDokument18 SeitenGuide To The Wiring Regulations - Pdf.compressedAkula VeerrajuNoch keine Bewertungen
- Stop app, install, copy crack fileDokument1 SeiteStop app, install, copy crack fileAkula VeerrajuNoch keine Bewertungen
- SolidWorks Tutorial12 Clamp English 08 LRDokument15 SeitenSolidWorks Tutorial12 Clamp English 08 LRAkula VeerrajuNoch keine Bewertungen
- Read MeDokument22 SeitenRead MeAkula VeerrajuNoch keine Bewertungen
- Harness TutorialDokument10 SeitenHarness Tutorialgajendra2010100% (1)
- Electrical PDFDokument5 SeitenElectrical PDFAkula VeerrajuNoch keine Bewertungen
- Solid Works Tutorial 12 Clamp English 08 LRDokument53 SeitenSolid Works Tutorial 12 Clamp English 08 LRAmilcar BVNoch keine Bewertungen
- RDSO Guidelines - Bs 112 - Planning of Road Over BridgesDokument9 SeitenRDSO Guidelines - Bs 112 - Planning of Road Over BridgesAnkur MundraNoch keine Bewertungen
- Getting Started with SOLIDWORKS ElectricalDokument31 SeitenGetting Started with SOLIDWORKS ElectricalIsaias Israel HernandezNoch keine Bewertungen
- 2012 - Elect Des DetailsDokument28 Seiten2012 - Elect Des DetailsArnabNoch keine Bewertungen
- 04 NX Electrical Mechanical Routing Eng PDFDokument6 Seiten04 NX Electrical Mechanical Routing Eng PDFDeenanathNoch keine Bewertungen
- Electrical Safety Inspection Report: A & B Outerwear LTDDokument12 SeitenElectrical Safety Inspection Report: A & B Outerwear LTDAkula VeerrajuNoch keine Bewertungen
- Dangers When Designing LT SystemsDokument12 SeitenDangers When Designing LT SystemsAkula VeerrajuNoch keine Bewertungen
- FIST guidelines for permissible loading of oil-immersed transformersDokument28 SeitenFIST guidelines for permissible loading of oil-immersed transformersliheber100% (2)
- Unit-1 (Part A) : Semester Vi Question Bank Cryptography and Network SecurityDokument3 SeitenUnit-1 (Part A) : Semester Vi Question Bank Cryptography and Network SecurityMAITRI PATELNoch keine Bewertungen
- Min/Max Multiple Traveling Salesmen Problem: Modified GA With A 2-Opt MutationDokument14 SeitenMin/Max Multiple Traveling Salesmen Problem: Modified GA With A 2-Opt Mutation901341682jrNoch keine Bewertungen
- Chapter 4 SI WorksheetDokument5 SeitenChapter 4 SI WorksheetFoster PerryNoch keine Bewertungen
- RPS Dashboard Sample DataDokument45 SeitenRPS Dashboard Sample DataNikhil PandeyNoch keine Bewertungen
- Sicso Networking Academy Chapter 6 v5Dokument6 SeitenSicso Networking Academy Chapter 6 v5Sopheap SangNoch keine Bewertungen
- 250 - U MarelDokument16 Seiten250 - U MareldicaveNoch keine Bewertungen
- 25 Top Consulting FirmsDokument1 Seite25 Top Consulting FirmsantonvorNoch keine Bewertungen
- Debugging Imagej Plugins in NetbeansDokument4 SeitenDebugging Imagej Plugins in NetbeansAlejandro Aldana RodriguezNoch keine Bewertungen
- Whitepaper Supplier CollaborationDokument20 SeitenWhitepaper Supplier Collaborationghosh_souvikNoch keine Bewertungen
- SENTIMENT ANALYSIS ON TWEETSDokument2 SeitenSENTIMENT ANALYSIS ON TWEETSvikibytesNoch keine Bewertungen
- Banking BPO Market Forecast 2014-2018 - Nelson HallDokument84 SeitenBanking BPO Market Forecast 2014-2018 - Nelson HallUtkarsh RaiNoch keine Bewertungen
- UNIX For Beginners: 1. Introduction: What Is UNIX ?Dokument21 SeitenUNIX For Beginners: 1. Introduction: What Is UNIX ?yemparalaNoch keine Bewertungen
- Matlab R2010a LinkDokument8 SeitenMatlab R2010a LinktariNoch keine Bewertungen
- Frame Element PDFDokument7 SeitenFrame Element PDFUnknow UnknowNoch keine Bewertungen
- GRE Square RootsDokument7 SeitenGRE Square RootsMahreen IlahiNoch keine Bewertungen
- AHP Based On Triangular Intuitionistic Fuzzy Number and Its Application To Supplier Selection ProblemDokument7 SeitenAHP Based On Triangular Intuitionistic Fuzzy Number and Its Application To Supplier Selection ProblemAndreSeptianNoch keine Bewertungen
- C Programming Questions and AnswersDokument19 SeitenC Programming Questions and AnswersBalaji MehtaNoch keine Bewertungen
- Factors Behind Cost Differences in Similar Software ProductsDokument5 SeitenFactors Behind Cost Differences in Similar Software ProductsMary Joy Paclibar BustamanteNoch keine Bewertungen
- Managing Cisco IOS Software Activation: BRKDEV-1201Dokument18 SeitenManaging Cisco IOS Software Activation: BRKDEV-1201jeffgrantinctNoch keine Bewertungen
- ERDAS IMAGINE 2013 Product DescriptionDokument30 SeitenERDAS IMAGINE 2013 Product DescriptionHendro SubagioNoch keine Bewertungen
- The Following Code Snippet Is Implemented For The: Function Diff - Actfun (Self, Z, Type)Dokument2 SeitenThe Following Code Snippet Is Implemented For The: Function Diff - Actfun (Self, Z, Type)saheb_juNoch keine Bewertungen
- CECEGEEK TV M3U Playlist with Premium ChannelsDokument13 SeitenCECEGEEK TV M3U Playlist with Premium Channelsqadam guiilenNoch keine Bewertungen
- ITP 100 Project-Part2-Simple-SelectionDokument2 SeitenITP 100 Project-Part2-Simple-Selectiontumi500% (2)
- OOP - Case StudyDokument84 SeitenOOP - Case StudyEmilSNoch keine Bewertungen
- Rimage Advanced Setup GuideDokument34 SeitenRimage Advanced Setup GuideChris AdamsNoch keine Bewertungen
- Srs Netflix SynopsisDokument5 SeitenSrs Netflix Synopsisadarsh raj50% (4)
- BdiDokument12 SeitenBdiSaptarshi BhattacharjeeNoch keine Bewertungen
- Assembly LanguageDokument21 SeitenAssembly LanguageAbdul MateenNoch keine Bewertungen
- M21des323 02Dokument59 SeitenM21des323 02asbsfgNoch keine Bewertungen