Das könnte Ihnen auch gefallen
- Poles and Zeros: - The Dynamic Behavior of A Transfer Function Model Can Be Characterized by The Numerical Value of Its Poles and ZerosDokument43 SeitenPoles and Zeros: - The Dynamic Behavior of A Transfer Function Model Can Be Characterized by The Numerical Value of Its Poles and ZerosSergio ReyesNoch keine Bewertungen
- ChE 404-Chapter 05Dokument55 SeitenChE 404-Chapter 05aliNoch keine Bewertungen
- More General Transfer Function Models: Bs Gs AsDokument21 SeitenMore General Transfer Function Models: Bs Gs As李承家Noch keine Bewertungen
- PDC Minor 2 - SlidesDokument190 SeitenPDC Minor 2 - SlidesPiyush AmbulgekarNoch keine Bewertungen
- PDC Minor 2 - SlidesDokument190 SeitenPDC Minor 2 - SlidesPiyush AmbulgekarNoch keine Bewertungen
- LAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueDokument7 SeitenLAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueSanjar BeyNoch keine Bewertungen
- Root Locus MethodDokument23 SeitenRoot Locus MethodChanoxismNoch keine Bewertungen
- StabilityDokument6 SeitenStabilitysekinNoch keine Bewertungen
- MECH 3610 Control Principles Root Locus TutorialDokument18 SeitenMECH 3610 Control Principles Root Locus TutorialYang ElvisQUNoch keine Bewertungen
- Arima 4 2011-12Dokument16 SeitenArima 4 2011-12Jairo Valverde ReyesNoch keine Bewertungen
- Robotics1 18.01.11 PDFDokument14 SeitenRobotics1 18.01.11 PDFmezzi houssemNoch keine Bewertungen
- Lecture 17: Sensitivity Methods: Prof. Tom Overbye Dept. of Electrical and Computer Engineering Texas A&M UniversityDokument44 SeitenLecture 17: Sensitivity Methods: Prof. Tom Overbye Dept. of Electrical and Computer Engineering Texas A&M UniversityManuelNoch keine Bewertungen
- Root LocusDokument47 SeitenRoot LocusNarendra ChaurasiaNoch keine Bewertungen
- Introduction To Model Order Reduction: I.4 - System Properties Stability, PassivityDokument32 SeitenIntroduction To Model Order Reduction: I.4 - System Properties Stability, Passivity_RAJMEHTANoch keine Bewertungen
- Tutorial 10Dokument18 SeitenTutorial 10Yang ElvisQUNoch keine Bewertungen
- Dynamic Response Characteristics of More Complicated ProcessesDokument38 SeitenDynamic Response Characteristics of More Complicated Processeshakita86Noch keine Bewertungen
- Root Locus Plots of Positive Feedback Systems Ongata BM ExtensionDokument8 SeitenRoot Locus Plots of Positive Feedback Systems Ongata BM ExtensionOLAGO ACHOKANoch keine Bewertungen
- Feedback Control Systems Phase Plane AnalysisDokument9 SeitenFeedback Control Systems Phase Plane AnalysisKthiha CnNoch keine Bewertungen
- Lecture 6: Stability of Dynamic Systems Lyapunov's Direct Method 6.1 Notions of StabilityDokument10 SeitenLecture 6: Stability of Dynamic Systems Lyapunov's Direct Method 6.1 Notions of Stabilitytennis1949Noch keine Bewertungen
- Chapter 11 Chang.2Dokument39 SeitenChapter 11 Chang.2satya sagarNoch keine Bewertungen
- National Exam May, 2017 16-Elec-A 1 CircuitsDokument6 SeitenNational Exam May, 2017 16-Elec-A 1 CircuitsK DNoch keine Bewertungen
- EMS507 Lecture 3 - System StabilityDokument21 SeitenEMS507 Lecture 3 - System Stability124ll124Noch keine Bewertungen
- Chapter 2 (Print)Dokument14 SeitenChapter 2 (Print)666aokiNoch keine Bewertungen
- CompendiumDokument116 SeitenCompendiumKämÿ LīäNoch keine Bewertungen
- Experiment 6Dokument9 SeitenExperiment 6punittanejaNoch keine Bewertungen
- Handout 4: Circle and Popov Criteria: Linear SystemDokument9 SeitenHandout 4: Circle and Popov Criteria: Linear SystemsamandondonNoch keine Bewertungen
- ECCOMAS Congress 2016 energy-momentum methodDokument11 SeitenECCOMAS Congress 2016 energy-momentum methodThomás VerderesiNoch keine Bewertungen
- Control Manual Lab 10Dokument14 SeitenControl Manual Lab 10Hussain HadiNoch keine Bewertungen
- Chapter 10 - Stability of Closed-Loop Control SystemsDokument27 SeitenChapter 10 - Stability of Closed-Loop Control SystemsFakhrulShahrilEzanieNoch keine Bewertungen
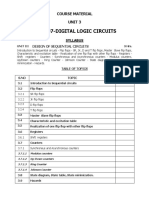
- Sec1207-Digital Logic Circuits: Course Material Unit 3Dokument79 SeitenSec1207-Digital Logic Circuits: Course Material Unit 3Dhiraj Chaudhari CO-137Noch keine Bewertungen
- 9UGDokument7 Seiten9UGAnuj PatelNoch keine Bewertungen
- Chapter Six Transient and Steady State ResponsesDokument35 SeitenChapter Six Transient and Steady State ResponsesGoktug AtikNoch keine Bewertungen
- IC6701 May 18 With KeyDokument14 SeitenIC6701 May 18 With KeyAnonymous yO7rcec6vuNoch keine Bewertungen
- Lab3 7Dokument5 SeitenLab3 7sendkushNoch keine Bewertungen
- EE3331C Feedback Control System L6: Root Locus Analysis: Arthur TAYDokument23 SeitenEE3331C Feedback Control System L6: Root Locus Analysis: Arthur TAYpremsanjith subramaniNoch keine Bewertungen
- Effect of ZerosDokument6 SeitenEffect of ZerosordekNoch keine Bewertungen
- Lecture 7 & 8 (Stability Analysis)Dokument35 SeitenLecture 7 & 8 (Stability Analysis)muhammad hamzaNoch keine Bewertungen
- Unit 3 - Control System - Www.rgpvnotes.inDokument12 SeitenUnit 3 - Control System - Www.rgpvnotes.inobivmousNoch keine Bewertungen
- Ising ProjDokument12 SeitenIsing ProjSyarifatul UlfaNoch keine Bewertungen
- DSK NyquistDokument19 SeitenDSK NyquistRahmat Wahyu PratamaNoch keine Bewertungen
- Exercises in Nonlinear Control SystemsDokument99 SeitenExercises in Nonlinear Control SystemsSteve DemirelNoch keine Bewertungen
- 2018 EE305 New SolutionDokument25 Seiten2018 EE305 New SolutionJasa R ChoudharyNoch keine Bewertungen
- 2.classical Mechanics - GATE PDFDokument26 Seiten2.classical Mechanics - GATE PDFMaitraNoch keine Bewertungen
- Lecture-2 Transfer FunctionDokument32 SeitenLecture-2 Transfer FunctionMuneeb JawaidNoch keine Bewertungen
- Oscillations WorksheetDokument23 SeitenOscillations Worksheetkaushik247Noch keine Bewertungen
- Lecture 14 StabilityDokument26 SeitenLecture 14 StabilityHamza KhanNoch keine Bewertungen
- 2 - Module3-Routh Stability CriterionDokument15 Seiten2 - Module3-Routh Stability CriterionShashankaNoch keine Bewertungen
- Chapter 2 Models For Dynamic Systems and Systems SimilarityDokument46 SeitenChapter 2 Models For Dynamic Systems and Systems SimilarityshamuNoch keine Bewertungen
- Advances in nonlinear finite element programmingDokument17 SeitenAdvances in nonlinear finite element programmingManoj BaralNoch keine Bewertungen
- Log-Log PlotsDokument22 SeitenLog-Log PlotsFedericoNoch keine Bewertungen
- Exercises in Nonlinear Control System 1Dokument116 SeitenExercises in Nonlinear Control System 1Tô Bá ChiếnNoch keine Bewertungen
- Dynamics of Systems Phase Plane Analysis For Nonlinear SystemsDokument25 SeitenDynamics of Systems Phase Plane Analysis For Nonlinear SystemsDerry RenaldyNoch keine Bewertungen
- Practice Exam QuestionsDokument3 SeitenPractice Exam QuestionsBrendanNoch keine Bewertungen
- Lecture 7 - Steady State ErrorDokument15 SeitenLecture 7 - Steady State ErrorAfiq AzharNoch keine Bewertungen
- Chemical Kinetics without Calculus: Understanding Reaction Schemes through Concentration-Time GraphsDokument2 SeitenChemical Kinetics without Calculus: Understanding Reaction Schemes through Concentration-Time GraphsEddddddddNoch keine Bewertungen
- Block Diagram FundamentalsDokument75 SeitenBlock Diagram FundamentalsJane Erestain BuenaobraNoch keine Bewertungen
- Electronics Telecommunjcation Engineering Paper - Ii: IO B J) - 11104Dokument15 SeitenElectronics Telecommunjcation Engineering Paper - Ii: IO B J) - 11104Brawner BrynmorNoch keine Bewertungen
- Extensions of The Two-Variable Linear Regression Model: TrueDokument13 SeitenExtensions of The Two-Variable Linear Regression Model: TrueshrutiNoch keine Bewertungen
- Ch4 Notes Transformations 2024Dokument12 SeitenCh4 Notes Transformations 2024Jaspar GlagovsNoch keine Bewertungen
- Calculus on Heisenberg Manifolds. (AM-119), Volume 119Von EverandCalculus on Heisenberg Manifolds. (AM-119), Volume 119Noch keine Bewertungen
- Karnaugh MapsDokument7 SeitenKarnaugh Mapsdigitales100% (1)
- 1.4 Solved ProblemsDokument2 Seiten1.4 Solved ProblemsMohammad Hussain Raza ShaikNoch keine Bewertungen
- "Roughness": Filtering and Filtering and Filtering and Filtering and Surface Surface Texture TextureDokument29 Seiten"Roughness": Filtering and Filtering and Filtering and Filtering and Surface Surface Texture TextureZouhair BenmabroukNoch keine Bewertungen
- BF 00571142Dokument1 SeiteBF 00571142Tymoteusz DziedzicNoch keine Bewertungen
- Mockups Showeet (Standard)Dokument46 SeitenMockups Showeet (Standard)Palo Alto Turismo y EntretenimientoNoch keine Bewertungen
- A2 Slot CAT2 QPDokument1 SeiteA2 Slot CAT2 QPSeverus SnapeNoch keine Bewertungen
- Example4 FatigueTools WS01-SNDokument23 SeitenExample4 FatigueTools WS01-SNJosé Luciano Cerqueira CesarNoch keine Bewertungen
- 38-13-10 Rev 2Dokument128 Seiten38-13-10 Rev 2Gdb HasseneNoch keine Bewertungen
- Risk in Clean RoomDokument9 SeitenRisk in Clean RoomABEERNoch keine Bewertungen
- Work Instruction For Coil Taping Process of EE14 (1&4 Pin)Dokument6 SeitenWork Instruction For Coil Taping Process of EE14 (1&4 Pin)k.mehaboob bashaNoch keine Bewertungen
- Field Behaviour of Stiffened Deep Cement Mixing PilesDokument17 SeitenField Behaviour of Stiffened Deep Cement Mixing PilesNguyen Quoc KhanhNoch keine Bewertungen
- ADC MethodDokument16 SeitenADC MethodPhilip K MathewNoch keine Bewertungen
- 26th IEEEP All Pakistan Students' SeminarDokument3 Seiten26th IEEEP All Pakistan Students' Seminarpakipower89Noch keine Bewertungen
- Vocabulary Extension Starter Without AnswersDokument1 SeiteVocabulary Extension Starter Without AnswersPatrcia CostaNoch keine Bewertungen
- Independent University, Bangladesh: Term Paper (Group Assignment)Dokument16 SeitenIndependent University, Bangladesh: Term Paper (Group Assignment)Johan Tausifur RahmanNoch keine Bewertungen
- 2022 MSK Poster JonDokument1 Seite2022 MSK Poster Jonjonathan wijayaNoch keine Bewertungen
- ADV7513 Hardware User GuideDokument46 SeitenADV7513 Hardware User Guide9183290782100% (1)
- Generate power from solar roof tilesDokument4 SeitenGenerate power from solar roof tilesshalinthNoch keine Bewertungen
- Object-Oriented Programming (OOP) Lecture No. 5Dokument40 SeitenObject-Oriented Programming (OOP) Lecture No. 5Muhammad ZeeshanNoch keine Bewertungen
- Bucket Elevators GuideDokument20 SeitenBucket Elevators GuideLeonardo De la CruzNoch keine Bewertungen
- COE 107.04 Cathodic Protection Monitoring Instruments and ProceduresDokument42 SeitenCOE 107.04 Cathodic Protection Monitoring Instruments and ProceduresMo'tasem Serdaneh100% (1)
- Examining Oral Communication FunctionsDokument5 SeitenExamining Oral Communication FunctionsJoshua Lander Soquita CadayonaNoch keine Bewertungen
- Mastering EES Chapter1Dokument66 SeitenMastering EES Chapter1mianvaherNoch keine Bewertungen
- E02-E02 Rev 3 Jun 2017 Selection of Elec Equip in Hazardous AreaDokument6 SeitenE02-E02 Rev 3 Jun 2017 Selection of Elec Equip in Hazardous AreaSALMANNoch keine Bewertungen
- Jason Cafer Biosketch 8-2009Dokument3 SeitenJason Cafer Biosketch 8-2009Jason CaferNoch keine Bewertungen
- Mechanical Vapor RecompressionDokument9 SeitenMechanical Vapor Recompressionnarayana reddy0% (1)
- Simulation and Performance of Double Gate Finfet Devices: B.Sethupathy, P.Aruna PriyaDokument3 SeitenSimulation and Performance of Double Gate Finfet Devices: B.Sethupathy, P.Aruna PriyaKrisumraj PurkaitNoch keine Bewertungen
- Discrete Math Assignment on Recurrence Relations, Graph Theory and Boolean AlgebraDokument6 SeitenDiscrete Math Assignment on Recurrence Relations, Graph Theory and Boolean AlgebralakkajaoNoch keine Bewertungen
- Accomplishment Report - English (Sy 2020-2021)Dokument7 SeitenAccomplishment Report - English (Sy 2020-2021)Erika Ikang WayawayNoch keine Bewertungen
- Cop Y: Queueing TheoryDokument7 SeitenCop Y: Queueing TheoryDiego VásquezNoch keine Bewertungen