Das könnte Ihnen auch gefallen
- Handbook of Ultra-Wideband Short-Range Sensing: Theory, Sensors, ApplicationsVon EverandHandbook of Ultra-Wideband Short-Range Sensing: Theory, Sensors, ApplicationsNoch keine Bewertungen
- Networked Wireless Sensor Data Collection: Issues, Challenges, and ApproachesDokument4 SeitenNetworked Wireless Sensor Data Collection: Issues, Challenges, and ApproachesSahbi BellamineNoch keine Bewertungen
- An Improved Clustering With Particle Swarm Optimization-Based Mobile Sink For Wireless Sensor NetworksDokument22 SeitenAn Improved Clustering With Particle Swarm Optimization-Based Mobile Sink For Wireless Sensor NetworksParuthi Ilam VazhuthiNoch keine Bewertungen
- ICT-Mobilesummit Odeur Final PaperDokument8 SeitenICT-Mobilesummit Odeur Final PaperEi LatNoch keine Bewertungen
- What Are Sensor NetworksDokument9 SeitenWhat Are Sensor NetworksGurpreet SinghNoch keine Bewertungen
- Wireless Sensor Networks: Ad-Hoc & Sensor Networks IV Year II SemDokument29 SeitenWireless Sensor Networks: Ad-Hoc & Sensor Networks IV Year II SemJitendra KingNoch keine Bewertungen
- Iarjset 38Dokument5 SeitenIarjset 38VenkatGollaNoch keine Bewertungen
- EEE440 Lecture Slide Part 4ver2011-2012Dokument33 SeitenEEE440 Lecture Slide Part 4ver2011-2012Abdirahman ElmiNoch keine Bewertungen
- Duty Cycle PDFDokument5 SeitenDuty Cycle PDFEngr Faheem AkhtarNoch keine Bewertungen
- RoutimngDokument31 SeitenRoutimngAdum BabuNoch keine Bewertungen
- Meppt 1Dokument24 SeitenMeppt 1Pravin Prakash AdivarekarNoch keine Bewertungen
- Chapter 13 Energy-Efficient WSN SlidesDokument31 SeitenChapter 13 Energy-Efficient WSN Slidesrizi007Noch keine Bewertungen
- Channel Assignment Strategies, Handoff Strategies Improvement inDokument37 SeitenChannel Assignment Strategies, Handoff Strategies Improvement inHarpuneet SinghNoch keine Bewertungen
- Ijcse V1i4p1Dokument8 SeitenIjcse V1i4p1ISAR-PublicationsNoch keine Bewertungen
- Research Article: Data Transmission Scheme Using Mobile Sink in Static Wireless Sensor NetworkDokument9 SeitenResearch Article: Data Transmission Scheme Using Mobile Sink in Static Wireless Sensor NetworkRachman Pandu DewanataNoch keine Bewertungen
- A Review On Virtual Based Data Dissemination Schemes For Mobile Sink in WSNDokument3 SeitenA Review On Virtual Based Data Dissemination Schemes For Mobile Sink in WSNijsretNoch keine Bewertungen
- Wireless Sensor NetworkDokument3 SeitenWireless Sensor NetworkShounak KatyayanNoch keine Bewertungen
- A Two-Level Scheme For Efficient Data Gathering in Mobile-Sink Wireless SensorDokument12 SeitenA Two-Level Scheme For Efficient Data Gathering in Mobile-Sink Wireless SensorDr-Eng Amir ElsafraweyNoch keine Bewertungen
- 8 Efficient FullDokument8 Seiten8 Efficient FullTJPRC PublicationsNoch keine Bewertungen
- Module 4 QB SolutionsDokument15 SeitenModule 4 QB SolutionsA To Z INFONoch keine Bewertungen
- Wireless Sensor NetworksDokument22 SeitenWireless Sensor NetworksGtecEceNoch keine Bewertungen
- Dco pt-2Dokument10 SeitenDco pt-2aayush waghereNoch keine Bewertungen
- Proposal of KMSTME Data Mining Clustering Method For Prolonging Life of Wireless Sensor NetworksDokument5 SeitenProposal of KMSTME Data Mining Clustering Method For Prolonging Life of Wireless Sensor NetworksMladen Maki VukNoch keine Bewertungen
- Overview of Wireless Sensor NetworksDokument12 SeitenOverview of Wireless Sensor NetworksAnonymous Fp38H3b0zNoch keine Bewertungen
- An Efficient Data Gathering Mechanism Using M - CollectorsDokument5 SeitenAn Efficient Data Gathering Mechanism Using M - CollectorsthesijNoch keine Bewertungen
- ANT Mod5Dokument100 SeitenANT Mod5DmanNoch keine Bewertungen
- Ccna Lecture :-Uploaded by Xafran KhanDokument22 SeitenCcna Lecture :-Uploaded by Xafran KhanXafran KhanNoch keine Bewertungen
- Sensor Networks AnDokument18 SeitenSensor Networks AnRADHANoch keine Bewertungen
- ESWC: Efficient Scheduling For The Mobile Sink in Wireless Sensor Networks With Delay Constraint AbstractDokument33 SeitenESWC: Efficient Scheduling For The Mobile Sink in Wireless Sensor Networks With Delay Constraint AbstractSenthilkumar KrishnasamyNoch keine Bewertungen
- Methodology For The Perseverance To Node Mobility Issues in Underwater Sensor Network (UWSN)Dokument5 SeitenMethodology For The Perseverance To Node Mobility Issues in Underwater Sensor Network (UWSN)Rahul SharmaNoch keine Bewertungen
- Pervasive Computing - Assingment 2 Routing Protocols: Interests and Data NamingDokument10 SeitenPervasive Computing - Assingment 2 Routing Protocols: Interests and Data NamingVeeresh MurugadassNoch keine Bewertungen
- WSN Unit-12Dokument21 SeitenWSN Unit-12vnpprasunaNoch keine Bewertungen
- An Improved Ant-Based Opportunistic Routing (AOR) For Non-Stagnant Packet Transmission in Wireless Sensor NetworkDokument21 SeitenAn Improved Ant-Based Opportunistic Routing (AOR) For Non-Stagnant Packet Transmission in Wireless Sensor NetworkPadmapriya TNoch keine Bewertungen
- Mechta 2018Dokument22 SeitenMechta 2018Hassan KhaledNoch keine Bewertungen
- Unit 3 Co Channel IntereferenceDokument36 SeitenUnit 3 Co Channel IntereferenceHarshaPuttaguntaNoch keine Bewertungen
- 1 Ijcnwmcaug20181Dokument12 Seiten1 Ijcnwmcaug20181TJPRC PublicationsNoch keine Bewertungen
- SensorDokument25 SeitenSensorIris AlibehajNoch keine Bewertungen
- Energy Efficient and Secure Routing For Wmsns Using Directional AntennaDokument6 SeitenEnergy Efficient and Secure Routing For Wmsns Using Directional AntennaInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- WSN Routing ProtocolsDokument77 SeitenWSN Routing Protocolsveeru3112Noch keine Bewertungen
- A Discrete Ant Lion Optimization (DALO) Algorithm For Solving Data Gathering Tour Problem in Wireless Sensor NetworksDokument8 SeitenA Discrete Ant Lion Optimization (DALO) Algorithm For Solving Data Gathering Tour Problem in Wireless Sensor NetworksIsrar UllahNoch keine Bewertungen
- 116 1460528489 - 13-04-2016 PDFDokument6 Seiten116 1460528489 - 13-04-2016 PDFEditor IJRITCCNoch keine Bewertungen
- 1303 5365 PDFDokument11 Seiten1303 5365 PDFkrishna mohan pandeyNoch keine Bewertungen
- Data Acquisition-1Dokument23 SeitenData Acquisition-1sanyengereNoch keine Bewertungen
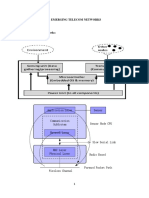
- Emerging Telecom Networks: Application Layer SensorDokument28 SeitenEmerging Telecom Networks: Application Layer SensorsuryaNoch keine Bewertungen
- WSN - IntroductionDokument48 SeitenWSN - IntroductionVaishnavi BalasubramanianNoch keine Bewertungen
- An Energy Efficient Routing Algorithm For Underwater Acoustic Sensor NetworksDokument5 SeitenAn Energy Efficient Routing Algorithm For Underwater Acoustic Sensor NetworksMuthu Vijay DeepakNoch keine Bewertungen
- An Energy Efficient Algorithm To Avoid Hot Spot Effects in Wireless Sensor NetworksDokument5 SeitenAn Energy Efficient Algorithm To Avoid Hot Spot Effects in Wireless Sensor NetworksSugumar Sar DuraiNoch keine Bewertungen
- Thesis Report-ENERGY EFFICIENT CLUSTERING ALGORITHM BASED ON MAXIMUM LIKELIHOOD ESTIMATION IN WIRELESS SENSOR NETWORKDokument61 SeitenThesis Report-ENERGY EFFICIENT CLUSTERING ALGORITHM BASED ON MAXIMUM LIKELIHOOD ESTIMATION IN WIRELESS SENSOR NETWORKUday Rai100% (2)
- Moussa2021..distance and VCHDokument14 SeitenMoussa2021..distance and VCHMouna elamariNoch keine Bewertungen
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDokument4 SeitenIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)Noch keine Bewertungen
- Energy Aware Routing Algorithm For WSN Applications in Border SurveillanceDokument6 SeitenEnergy Aware Routing Algorithm For WSN Applications in Border SurveillanceniteshsisodiyaNoch keine Bewertungen
- Distributed Energy-Efficient Clustering Algorithm For Wireless Sensor NetworksDokument7 SeitenDistributed Energy-Efficient Clustering Algorithm For Wireless Sensor NetworksInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Thecellularconcept 130227020319Dokument28 SeitenThecellularconcept 130227020319yarmeenaNoch keine Bewertungen
- WSN Project ReviewDokument38 SeitenWSN Project ReviewSyed Tazirul IlmNoch keine Bewertungen
- Jan M Rabaey Digital IC DesignDokument39 SeitenJan M Rabaey Digital IC DesignwearoleNoch keine Bewertungen
- Lecture Notes: Internet of Things (IOT)Dokument10 SeitenLecture Notes: Internet of Things (IOT)fajar nur fadilahNoch keine Bewertungen
- Design of Multi-Rate Wlans Using Non-Linear Algorithm: Available Online atDokument2 SeitenDesign of Multi-Rate Wlans Using Non-Linear Algorithm: Available Online atIJARTETNoch keine Bewertungen
- Unit IiDokument119 SeitenUnit IiGunasekaran PNoch keine Bewertungen
- Applciation of Compressive Sensing To Seismic Acquisition WSNs LatestDokument39 SeitenApplciation of Compressive Sensing To Seismic Acquisition WSNs LatestHamood Riasat KhanNoch keine Bewertungen
- Physical Education: Learning Activity SheetDokument13 SeitenPhysical Education: Learning Activity SheetRhea Jane B. CatalanNoch keine Bewertungen
- Pdf-To-Word EditedDokument48 SeitenPdf-To-Word EditedJames Genesis Ignacio LolaNoch keine Bewertungen
- Marketing Plan For Optimo InternationalDokument47 SeitenMarketing Plan For Optimo InternationalNiña Alfonso100% (1)
- Fill in The Blank Spaces With The Correct PrepositionDokument20 SeitenFill in The Blank Spaces With The Correct PrepositionDora Aguirre GutierrezNoch keine Bewertungen
- (Essential Histories) Waldemar Heckel - The Wars of Alexander The Great-Osprey PDFDokument97 Seiten(Essential Histories) Waldemar Heckel - The Wars of Alexander The Great-Osprey PDFJorel Fex100% (3)
- Bible Study OutlineDokument2 SeitenBible Study OutlineAnonymous v4SN2iMOyNoch keine Bewertungen
- Figures of Speech StylisticsDokument11 SeitenFigures of Speech StylisticsCarmie Lactaotao DasallaNoch keine Bewertungen
- Unit 2Dokument4 SeitenUnit 2api-296199660Noch keine Bewertungen
- 17373.selected Works in Bioinformatics by Xuhua Xia PDFDokument190 Seiten17373.selected Works in Bioinformatics by Xuhua Xia PDFJesus M. RuizNoch keine Bewertungen
- AZ-300 - Azure Solutions Architect TechnologiesDokument3 SeitenAZ-300 - Azure Solutions Architect TechnologiesAmar Singh100% (1)
- LM3886Dokument24 SeitenLM3886moacirjmNoch keine Bewertungen
- (OCM) Chapter 1 Principles of ManagementDokument23 Seiten(OCM) Chapter 1 Principles of ManagementMehfooz PathanNoch keine Bewertungen
- CV Template - 2018-2020Dokument2 SeitenCV Template - 2018-2020Rahul AbhishekNoch keine Bewertungen
- Astro ExamDokument7 SeitenAstro ExamRitu DuaNoch keine Bewertungen
- HDLSS Numerical Assignments - DOC FormatDokument3 SeitenHDLSS Numerical Assignments - DOC FormatNikhil UpadhyayNoch keine Bewertungen
- BK Hodd 000401Dokument25 SeitenBK Hodd 000401KhinChoWin100% (1)
- Technology in EducationDokument3 SeitenTechnology in EducationDinesh MadhavanNoch keine Bewertungen
- Reading Activity - A Lost DogDokument3 SeitenReading Activity - A Lost DogGigsFloripaNoch keine Bewertungen
- Numerical Analysis: Prof. Dr. Süheyla ÇEHRELİDokument15 SeitenNumerical Analysis: Prof. Dr. Süheyla ÇEHRELİEzgi GeyikNoch keine Bewertungen
- Att.3 Training Evaluation For Course Trainer & FacilitiesDokument2 SeitenAtt.3 Training Evaluation For Course Trainer & FacilitiesYusufNoch keine Bewertungen
- Adv Tariq Writ of Land Survey Tribunal (Alomgir ALo) Final 05.06.2023Dokument18 SeitenAdv Tariq Writ of Land Survey Tribunal (Alomgir ALo) Final 05.06.2023senorislamNoch keine Bewertungen
- Hayat e Imam Abu Hanifa by Sheikh Muhammad Abu ZohraDokument383 SeitenHayat e Imam Abu Hanifa by Sheikh Muhammad Abu ZohraShahood AhmedNoch keine Bewertungen
- 9300 Servo Inverter TRDokument10 Seiten9300 Servo Inverter TRIhsan CanakogluNoch keine Bewertungen
- Constitutional Law Sem 5Dokument5 SeitenConstitutional Law Sem 5Ichchhit SrivastavaNoch keine Bewertungen
- LIFT OFF ModuleDokument28 SeitenLIFT OFF ModulericardoNoch keine Bewertungen
- PracticeProbs (5 - 27 - 07) - CMOS Analog ICs PDFDokument70 SeitenPracticeProbs (5 - 27 - 07) - CMOS Analog ICs PDFmyluvahanNoch keine Bewertungen
- MULTIPLE CHOICE. Choose The One Alternative That Best Completes The Statement or Answers The QuestionDokument6 SeitenMULTIPLE CHOICE. Choose The One Alternative That Best Completes The Statement or Answers The QuestionBoshra BoshraNoch keine Bewertungen
- IndexDokument3 SeitenIndexBrunaJ.MellerNoch keine Bewertungen
- Module 1 Lesson 1 Activity and Analysis: Special Needs EducationDokument2 SeitenModule 1 Lesson 1 Activity and Analysis: Special Needs EducationShalyn ArimaoNoch keine Bewertungen
- Longman Communication 3000Dokument37 SeitenLongman Communication 3000irfanece100% (5)