Das könnte Ihnen auch gefallen
- A Multivariate Weibull DistributionDokument12 SeitenA Multivariate Weibull DistributionJean ReneNoch keine Bewertungen
- Exponential Fourier SeriesDokument4 SeitenExponential Fourier SeriesVincent KiptanuiNoch keine Bewertungen
- Symmetry Groups in Quantum Relativistic Dynamics.Dokument9 SeitenSymmetry Groups in Quantum Relativistic Dynamics.marinkoNoch keine Bewertungen
- A New Algorithm For Solving 3-CNF-SAT Problem: KeywordsDokument30 SeitenA New Algorithm For Solving 3-CNF-SAT Problem: KeywordsHiten LohakareNoch keine Bewertungen
- Ideal Gas ProcessesDokument2 SeitenIdeal Gas Processesbryan amadorNoch keine Bewertungen
- MATERIAL 5-Discriminant PDFDokument26 SeitenMATERIAL 5-Discriminant PDFfranciscomurillo7Noch keine Bewertungen
- CE687A Lecture15Dokument21 SeitenCE687A Lecture15varunNoch keine Bewertungen
- How CNNs WorkDokument92 SeitenHow CNNs WorkhòaNoch keine Bewertungen
- Applied Oligopoly ModelsDokument9 SeitenApplied Oligopoly Modelssuna leeNoch keine Bewertungen
- Gaussian Elimination Method PDFDokument14 SeitenGaussian Elimination Method PDFUmer farooq100% (1)
- HydraulicsDokument30 SeitenHydraulicsJoylene Dayao DayritNoch keine Bewertungen
- Equation Sheet For MME 9658b Term Test (March 7, 2023) : BCC Crystals: FCC Crystals: HCP CrystalsDokument6 SeitenEquation Sheet For MME 9658b Term Test (March 7, 2023) : BCC Crystals: FCC Crystals: HCP Crystalsmohammed SamarNoch keine Bewertungen
- Mosfet IDVdDokument2 SeitenMosfet IDVdAbid AbdullahNoch keine Bewertungen
- 1.dynamics of Relativistic Particles and Electromagnetic FieldsDokument6 Seiten1.dynamics of Relativistic Particles and Electromagnetic FieldsAyushman BishwasNoch keine Bewertungen
- Volumes of Solids of Revolution Calculus CMDokument22 SeitenVolumes of Solids of Revolution Calculus CMAnderson AlfredNoch keine Bewertungen
- Retake Transduction and Mechanical Devices April16 2019 With AnswersDokument5 SeitenRetake Transduction and Mechanical Devices April16 2019 With Answerskoen.bakker1234Noch keine Bewertungen
- Lec 5Dokument22 SeitenLec 5Ahmed FarhoudNoch keine Bewertungen
- Lecture W7abDokument167 SeitenLecture W7abcaneNoch keine Bewertungen
- Formulario DerivadasDokument1 SeiteFormulario Derivadasbriizb28Noch keine Bewertungen
- (Template) PETA-10-EDITTEDDokument6 Seiten(Template) PETA-10-EDITTEDAshira SerenityNoch keine Bewertungen
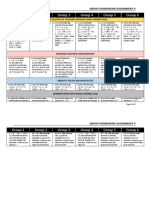
- Group 1 Group 2 Group 3 Group 4 Group 5 Group 6Dokument2 SeitenGroup 1 Group 2 Group 3 Group 4 Group 5 Group 6della salsabilaNoch keine Bewertungen
- Commutation Rules in Quantum Mechanics (Jacobi Identity)Dokument14 SeitenCommutation Rules in Quantum Mechanics (Jacobi Identity)Quimberlry MarcharlrieNoch keine Bewertungen
- 2023 - Linear and Abstract Algebra - Group 01Dokument8 Seiten2023 - Linear and Abstract Algebra - Group 01redwanhasan980Noch keine Bewertungen
- Plackett BurmanDokument46 SeitenPlackett BurmanalexNoch keine Bewertungen
- Both Yes and No!: I I I I IDokument1 SeiteBoth Yes and No!: I I I I IBHARATHITHASAN S 20PHD0413Noch keine Bewertungen
- 04-CNN PDFDokument170 Seiten04-CNN PDFMuhammad Rizwan KhalidNoch keine Bewertungen
- How To Conduct Toda YamamotoDokument3 SeitenHow To Conduct Toda YamamotoStephen EkekeNoch keine Bewertungen
- Lesson 10 Integration of Inverse Hyperbolic FunctionDokument6 SeitenLesson 10 Integration of Inverse Hyperbolic FunctionJCLLNoch keine Bewertungen
- 2test For Readiness - Partners Pre-Assessment - Statistics and Data Science - Assess Your Readiness - EdxDokument5 Seiten2test For Readiness - Partners Pre-Assessment - Statistics and Data Science - Assess Your Readiness - EdxAntonNoch keine Bewertungen
- Cluster Random SamplingDokument2 SeitenCluster Random SamplingRifa KamelliaNoch keine Bewertungen
- 1 - WQU - CTSP - M1 - Compiled - ContentDokument35 Seiten1 - WQU - CTSP - M1 - Compiled - ContentJoe Ng100% (1)
- Lecture-5-6 Moment, Skewness and KurtosisDokument5 SeitenLecture-5-6 Moment, Skewness and KurtosisNafiul Alam SnigdhoNoch keine Bewertungen
- 2.3 Diesel CycleDokument15 Seiten2.3 Diesel CycleSan Jose, Kyla Mae M.Noch keine Bewertungen
- Six Circular FunctionsDokument57 SeitenSix Circular FunctionsBrian PaglinawanNoch keine Bewertungen
- Six Circular FunctionsDokument57 SeitenSix Circular FunctionsBrian PaglinawanNoch keine Bewertungen
- Assignment1 QuestionDokument12 SeitenAssignment1 QuestionRubyat100% (1)
- AJAZ-ECO204 Applied Oligopoly Models-FORMULASDokument3 SeitenAJAZ-ECO204 Applied Oligopoly Models-FORMULASGrace IdreesNoch keine Bewertungen
- Stiffness 1Dokument31 SeitenStiffness 1ahmed elgendyNoch keine Bewertungen
- Assignment Osarumwense Bateson Omorogiuwa Eee873Dokument13 SeitenAssignment Osarumwense Bateson Omorogiuwa Eee873Desmond Prince OmorogiuwaNoch keine Bewertungen
- 2.lines of Best Fit PDFDokument6 Seiten2.lines of Best Fit PDFgeorges khairallahNoch keine Bewertungen
- Lab 2Dokument4 SeitenLab 2hosaam123Noch keine Bewertungen
- FM1 AS-level Formula SheetDokument3 SeitenFM1 AS-level Formula SheetewjuhewauwajuawhukawhdwajhdwajwadhjadwhNoch keine Bewertungen
- Plasticity and Deformation Process: Stress-Strain Relations in Deformation TheoryDokument27 SeitenPlasticity and Deformation Process: Stress-Strain Relations in Deformation TheoryJosue AzurinNoch keine Bewertungen
- Section+6 1++Inverse+Circular+FunctionsDokument8 SeitenSection+6 1++Inverse+Circular+FunctionsRyanne RichardsonNoch keine Bewertungen
- If You Don't Learn From Your Mistakes, There's No Sense of Making ThemDokument58 SeitenIf You Don't Learn From Your Mistakes, There's No Sense of Making ThemCayetano, Tara Leigh MartinezNoch keine Bewertungen
- Nuclear Reactor AnalysisDokument30 SeitenNuclear Reactor AnalysisSandamali SanchalaNoch keine Bewertungen
- EE2401 - Power System Operation and Control Unit II Real Power-Frequency ControlDokument27 SeitenEE2401 - Power System Operation and Control Unit II Real Power-Frequency ControlSilas Stephen100% (1)
- CA1 MASTER FILE v6 2Dokument16 SeitenCA1 MASTER FILE v6 2Dheemant RastogiNoch keine Bewertungen
- Unit IX - Session 22Dokument10 SeitenUnit IX - Session 22e16125Noch keine Bewertungen
- Work, Energy and Power (Part 3)Dokument13 SeitenWork, Energy and Power (Part 3)Sandesh TimalsinaNoch keine Bewertungen
- MMC 2019 Grade 7 Division Finals - Team Oral Competition Questions With SolutionsDokument33 SeitenMMC 2019 Grade 7 Division Finals - Team Oral Competition Questions With SolutionsNoreenNoch keine Bewertungen
- Class 02 Advanced Inorganic Chemistry: Symmetry & Group TheoryDokument29 SeitenClass 02 Advanced Inorganic Chemistry: Symmetry & Group TheoryLuu KhueNoch keine Bewertungen
- L2 - Satellite Orbital Motion - P3Dokument15 SeitenL2 - Satellite Orbital Motion - P3Anil SubediNoch keine Bewertungen
- Class-6 MarhsDokument6 SeitenClass-6 Marhsrameshdorage12Noch keine Bewertungen
- Formulee Sheet Given in The ExamDokument4 SeitenFormulee Sheet Given in The Examhalide90Noch keine Bewertungen
- Global Theory of a Second Order Linear Ordinary Differential Equation with a Polynomial CoefficientVon EverandGlobal Theory of a Second Order Linear Ordinary Differential Equation with a Polynomial CoefficientNoch keine Bewertungen
- NPT Thread SizesDokument1 SeiteNPT Thread SizesVishal AryaNoch keine Bewertungen
- Lit Review Model 2Dokument12 SeitenLit Review Model 2Vishal AryaNoch keine Bewertungen
- Oklahoma Driving Manual PDFDokument98 SeitenOklahoma Driving Manual PDFVishal AryaNoch keine Bewertungen
- Bullet Train PDFDokument149 SeitenBullet Train PDFVishal AryaNoch keine Bewertungen
- University of Hawai'i Press Philosophy East and WestDokument10 SeitenUniversity of Hawai'i Press Philosophy East and WestVishal AryaNoch keine Bewertungen
- Chaos and Its ApplicationsDokument5 SeitenChaos and Its ApplicationsVishal AryaNoch keine Bewertungen
- Special Courses of Instruction: Occult Mathematics Series One, Lesson One: IntroductionDokument32 SeitenSpecial Courses of Instruction: Occult Mathematics Series One, Lesson One: IntroductionVishal AryaNoch keine Bewertungen
- Bmjcred00479 0041 PDFDokument6 SeitenBmjcred00479 0041 PDFVishal AryaNoch keine Bewertungen
- Chemical Engineering and Processing: Process IntensificationDokument9 SeitenChemical Engineering and Processing: Process IntensificationVishal AryaNoch keine Bewertungen
- Engineering Failure Analysis: Changjun Zou, Pinwen Zhao, Meng Wang, Delei Liu, Hongda Wang, Zhang WenDokument6 SeitenEngineering Failure Analysis: Changjun Zou, Pinwen Zhao, Meng Wang, Delei Liu, Hongda Wang, Zhang WenVishal AryaNoch keine Bewertungen
- Overview of The IEC 61131 Standard: Data Sheet 2101127-ABDokument4 SeitenOverview of The IEC 61131 Standard: Data Sheet 2101127-ABVishal AryaNoch keine Bewertungen
- Control of Shunt Reactor Inrush Currents in The Hellenic Power SystemDokument8 SeitenControl of Shunt Reactor Inrush Currents in The Hellenic Power SystemVishal Arya100% (1)
- Fired HeatersDokument24 SeitenFired HeatersArief RachmanNoch keine Bewertungen
- Springer Erkenntnis (1975-) : This Content Downloaded From 141.219.44.34 On Tue, 27 Nov 2018 14:36:40 UTCDokument24 SeitenSpringer Erkenntnis (1975-) : This Content Downloaded From 141.219.44.34 On Tue, 27 Nov 2018 14:36:40 UTCVishal AryaNoch keine Bewertungen
- UHVDokument27 SeitenUHVVishal AryaNoch keine Bewertungen
- Perkin Et Al 2007 DyslexiaDokument18 SeitenPerkin Et Al 2007 DyslexiaVishal AryaNoch keine Bewertungen
- HVDC GeDokument12 SeitenHVDC GeVishal AryaNoch keine Bewertungen
- Robert "Dr. Bob" Gardner: ETSU Abstract Algebra ClubDokument48 SeitenRobert "Dr. Bob" Gardner: ETSU Abstract Algebra ClubVishal AryaNoch keine Bewertungen
- Byth T.S., Robertson E.F.-algebra Through Practice A Collection of Problems in Algebra With Solutions. Groups (1985)Dokument109 SeitenByth T.S., Robertson E.F.-algebra Through Practice A Collection of Problems in Algebra With Solutions. Groups (1985)hippojunkieNoch keine Bewertungen
- The Quaternion Group Q: History and BackgroundDokument12 SeitenThe Quaternion Group Q: History and BackgroundOVEN BAKED OVEN BAKEDNoch keine Bewertungen
- General Interval SystemDokument14 SeitenGeneral Interval Systemmarco antonio Encinas100% (1)
- List of Small GroupsDokument10 SeitenList of Small GroupsfelipeplatziNoch keine Bewertungen
- The Cyclic Graph of A Finite GroupDokument8 SeitenThe Cyclic Graph of A Finite GroupRosyid Asy-syifaNoch keine Bewertungen
- 2009-2010 PHD Student HandbookDokument105 Seiten2009-2010 PHD Student Handbookviethunghg81Noch keine Bewertungen
- 293-297 Article in AJSR Yanita DKKDokument6 Seiten293-297 Article in AJSR Yanita DKKYanitaNoch keine Bewertungen
- Math 5285H: Fundamental Structures of Algebra I: Take Home Exam 1, (Due in Class, October 12th, 2011)Dokument2 SeitenMath 5285H: Fundamental Structures of Algebra I: Take Home Exam 1, (Due in Class, October 12th, 2011)Sony MooreNoch keine Bewertungen