Das könnte Ihnen auch gefallen
- Lab No. 04 ARM Assembly Programming Using Arithmetic InstructionsDokument16 SeitenLab No. 04 ARM Assembly Programming Using Arithmetic InstructionsAbdullah AbidNoch keine Bewertungen
- TFP 3000en102 PDFDokument9 SeitenTFP 3000en102 PDFJoseph BoshehNoch keine Bewertungen
- CS104: Computer Organization: 30 March, 2020Dokument31 SeitenCS104: Computer Organization: 30 March, 2020Om PrakashNoch keine Bewertungen
- Chapter 4 The Processor 2 4.4Dokument17 SeitenChapter 4 The Processor 2 4.4Anam GhaffarNoch keine Bewertungen
- LEC08Dokument52 SeitenLEC08Zain AliNoch keine Bewertungen
- Cpu - Memory (Disk Drives, DRAM, SRAM, CD) - Input (Mouse, Keyboard) - Output (Display, Printer) - Network - SoftwareDokument14 SeitenCpu - Memory (Disk Drives, DRAM, SRAM, CD) - Input (Mouse, Keyboard) - Output (Display, Printer) - Network - Softwareanand_duraiswamyNoch keine Bewertungen
- Computer Architecture: Single-Cycle ImplementationDokument14 SeitenComputer Architecture: Single-Cycle ImplementationElisée NdjabuNoch keine Bewertungen
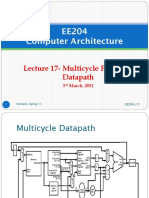
- Lec17-Multicycle Processor DatapathDokument21 SeitenLec17-Multicycle Processor DatapathAnonymous tbEoUfvNoch keine Bewertungen
- Lecture 8Dokument26 SeitenLecture 8Pranav ChauhanNoch keine Bewertungen
- 4 - Processor (Multi Cycle)Dokument42 Seiten4 - Processor (Multi Cycle)xuanzzkNoch keine Bewertungen
- Chapter 5 - The Processor: Datapath and ControlDokument101 SeitenChapter 5 - The Processor: Datapath and Controlapi-26072581Noch keine Bewertungen
- Basic Computer OrganizationTiming and Control UnitDokument12 SeitenBasic Computer OrganizationTiming and Control UnitHARI HARAN REDDYNoch keine Bewertungen
- Chapter4 ProcessorDokument143 SeitenChapter4 ProcessorZhuan WuNoch keine Bewertungen
- This DatapathDokument15 SeitenThis DatapathSadaf HameedNoch keine Bewertungen
- HW2 Carch 2023 SolDokument7 SeitenHW2 Carch 2023 SolSXNoch keine Bewertungen
- Basic Computer OrganizationInstruction CycleDokument8 SeitenBasic Computer OrganizationInstruction CycleHARI HARAN REDDYNoch keine Bewertungen
- Lab. Test-I: MIPS's Multicycle Fibonacci ProcessorDokument9 SeitenLab. Test-I: MIPS's Multicycle Fibonacci ProcessorShrey PanditNoch keine Bewertungen
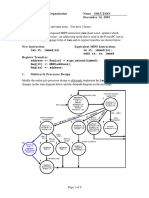
- ECE 313 Computer Organization Name Solution Final Exam December 14, 2002Dokument9 SeitenECE 313 Computer Organization Name Solution Final Exam December 14, 2002Minh Hà QuangNoch keine Bewertungen
- Lect5 Single Cycle ControlDokument29 SeitenLect5 Single Cycle ControlVishal MittalNoch keine Bewertungen
- Design of The MIPS ProcessorDokument24 SeitenDesign of The MIPS Processorwelcome to my worldNoch keine Bewertungen
- Lect 07 Processordesign PDFDokument55 SeitenLect 07 Processordesign PDFMo LêNoch keine Bewertungen
- Unit 1 MPUOrganizationDokument90 SeitenUnit 1 MPUOrganizationspam.me.adiNoch keine Bewertungen
- 2004 Spring Exam2Dokument8 Seiten2004 Spring Exam2Mohammad NizamNoch keine Bewertungen
- ECE 338 Parallel Computer Architecture Spring 2022: Basic MIPS Pipeline ReviewDokument11 SeitenECE 338 Parallel Computer Architecture Spring 2022: Basic MIPS Pipeline ReviewNikitasNoch keine Bewertungen
- CSE332 / EEE336 Computer Organization & Architecture MIPS Datapath and Its ControlDokument33 SeitenCSE332 / EEE336 Computer Organization & Architecture MIPS Datapath and Its ControlSamrat ShovonNoch keine Bewertungen
- RISC Processor Design: Multi-Cycle Cycle Implementation: MipsDokument49 SeitenRISC Processor Design: Multi-Cycle Cycle Implementation: MipsKiran KumarNoch keine Bewertungen
- Chapter 3 Lecture 1 Central Processing UnitDokument37 SeitenChapter 3 Lecture 1 Central Processing UnitIsiyak SolomonNoch keine Bewertungen
- An Instructional Processor Design Using VHDL and An FpgaDokument10 SeitenAn Instructional Processor Design Using VHDL and An FpgaRezwan KhanNoch keine Bewertungen
- 2005 Spring Exam2 SolDokument6 Seiten2005 Spring Exam2 SolNipun HarshaNoch keine Bewertungen
- Mini MIPSDokument6 SeitenMini MIPSKeith NissankaNoch keine Bewertungen
- A Single-Cycle MIPS ProcessorDokument13 SeitenA Single-Cycle MIPS ProcessorlittlechoNoch keine Bewertungen
- ATV600 - Communication Parameters: WarningDokument41 SeitenATV600 - Communication Parameters: WarningMaycon DouglasNoch keine Bewertungen
- Basic Performance EquationDokument42 SeitenBasic Performance EquationVishal BasugadeNoch keine Bewertungen
- Lec 05Dokument13 SeitenLec 05jyothibellary4233Noch keine Bewertungen
- Superloops and ControllersDokument2 SeitenSuperloops and Controllersbouzahri boumedieneNoch keine Bewertungen
- Slides Week8 PDFDokument46 SeitenSlides Week8 PDFvidhya dsNoch keine Bewertungen
- Chapter 2Dokument3 SeitenChapter 2ATHIRA V RNoch keine Bewertungen
- Design A MIPS Processor (II)Dokument10 SeitenDesign A MIPS Processor (II)BIBARTAN DASNoch keine Bewertungen
- Chapter4 Processor PDFDokument149 SeitenChapter4 Processor PDFÁi NguyễnNoch keine Bewertungen
- Iecon2018 v2Dokument6 SeitenIecon2018 v2sergioNoch keine Bewertungen
- Mimari ReportDokument27 SeitenMimari ReportRomaan AliNoch keine Bewertungen
- Service Manual: PC-1211, CE-121Dokument43 SeitenService Manual: PC-1211, CE-121aleph zeroNoch keine Bewertungen
- Unit IV ARM - 470480110Dokument44 SeitenUnit IV ARM - 470480110praneeth chinthireddyNoch keine Bewertungen
- LE3U-Manual SpecificationDokument11 SeitenLE3U-Manual SpecificationPVC XANH QDNoch keine Bewertungen
- Multicycle DatapathDokument23 SeitenMulticycle DatapathGIRINATH RNoch keine Bewertungen
- f37 Book Intarch Pres pt4Dokument89 Seitenf37 Book Intarch Pres pt4adilNoch keine Bewertungen
- Jan. 2011 Computer Architecture, The Arithmetic/Logic Unit Slide 1Dokument94 SeitenJan. 2011 Computer Architecture, The Arithmetic/Logic Unit Slide 1adilNoch keine Bewertungen
- Build A Simple Computer: Lecturer: Pazir AhmadDokument80 SeitenBuild A Simple Computer: Lecturer: Pazir AhmadfayeqNoch keine Bewertungen
- CS 251, Winter 2019, Assignment 3.0.1: 3% of Course MarkDokument6 SeitenCS 251, Winter 2019, Assignment 3.0.1: 3% of Course MarkAjay PatelNoch keine Bewertungen
- Microarchitecture (Continued) : Sam AmiriDokument30 SeitenMicroarchitecture (Continued) : Sam AmiriMandy LoresNoch keine Bewertungen
- Risc-16 Sequential ImplementationDokument11 SeitenRisc-16 Sequential ImplementationlamtalsiNoch keine Bewertungen
- 6 MultiCycleDokument66 Seiten6 MultiCycleisaacopineNoch keine Bewertungen
- Control Unit Design: Decoder &Dokument30 SeitenControl Unit Design: Decoder &blackmaverick0912Noch keine Bewertungen
- 16C550 UartDokument18 Seiten16C550 UartChilly KewlNoch keine Bewertungen
- Lab 7 PDFDokument9 SeitenLab 7 PDFLeonardo FuchsNoch keine Bewertungen
- Lec02 Architecture1Dokument28 SeitenLec02 Architecture1Whenrick DilloNoch keine Bewertungen
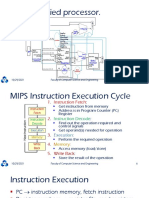
- 03 Intruction ExecDokument18 Seiten03 Intruction Execsanjanamooli77Noch keine Bewertungen
- rm0455-STM32H7A3 - 7B3 및 STM32H7B0 Value line 고급 Arm® 기반 32비트 MCU7-14Dokument269 Seitenrm0455-STM32H7A3 - 7B3 및 STM32H7B0 Value line 고급 Arm® 기반 32비트 MCU7-14임대진Noch keine Bewertungen
- SYS3041 Cours Microprocesseur Part2Dokument40 SeitenSYS3041 Cours Microprocesseur Part2mathiasdimeglio58Noch keine Bewertungen
- Unit 1 MPU Organization PDFDokument96 SeitenUnit 1 MPU Organization PDFSIDDHARTH TATHAGATNoch keine Bewertungen
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Von EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Noch keine Bewertungen
- Ba6a BomDokument20 SeitenBa6a BomDerick FernandesNoch keine Bewertungen
- Layout & Stick DiagramsDokument17 SeitenLayout & Stick DiagramsJamius SiamNoch keine Bewertungen
- BISS0001 SilvanChipDokument2 SeitenBISS0001 SilvanChipSamorai KazaNoch keine Bewertungen
- Automatic Night-Lamp With Morning AlarmDokument1 SeiteAutomatic Night-Lamp With Morning Alarmapi-3736447100% (1)
- Jyothy Institute of Technology: Work BookDokument8 SeitenJyothy Institute of Technology: Work BookMadhavan SowrirajanNoch keine Bewertungen
- EPEVER Datasheet IPower 220v 1Dokument2 SeitenEPEVER Datasheet IPower 220v 1David QuintanaNoch keine Bewertungen
- Explain The Physical Layer of The I2C ProtocolDokument7 SeitenExplain The Physical Layer of The I2C ProtocolNEETHU PRAKASH100% (1)
- Usb ItnDokument6 SeitenUsb ItnEU VaNoch keine Bewertungen
- PSA Experiment 5Dokument6 SeitenPSA Experiment 5dwiti krushnaNoch keine Bewertungen
- Schneider Theory PDFDokument12 SeitenSchneider Theory PDFArbind KumarNoch keine Bewertungen
- Spesifikasi Dan Harga Desktop PC All in One Lenovo Lengkap Terbaru 2018Dokument2 SeitenSpesifikasi Dan Harga Desktop PC All in One Lenovo Lengkap Terbaru 2018Ibe Tee Dua PeeNoch keine Bewertungen
- Features Description: LT8609/LT8609A/LT8609B 42V, 3A Synchronous Step-Down Regulator With 2.5 A Quiescent CurrentDokument31 SeitenFeatures Description: LT8609/LT8609A/LT8609B 42V, 3A Synchronous Step-Down Regulator With 2.5 A Quiescent CurrentNguyễn QuangNoch keine Bewertungen
- FMC NKS 401000Dokument3 SeitenFMC NKS 401000samee 692Noch keine Bewertungen
- Casa Systems Advantech Intel and Wind River - Virtual Mobile Security at The Network EdgeDokument5 SeitenCasa Systems Advantech Intel and Wind River - Virtual Mobile Security at The Network EdgeoskcarrasquiNoch keine Bewertungen
- Data Sheet MAXPRO NVR PE Professional EditionDokument3 SeitenData Sheet MAXPRO NVR PE Professional EditionAhmad MuzayyinNoch keine Bewertungen
- Calculating Fiber Optic Loss BudgetsDokument9 SeitenCalculating Fiber Optic Loss BudgetsteomondoNoch keine Bewertungen
- Overview of Graphics SystemDokument42 SeitenOverview of Graphics SystemFaraz Mohammad Khan100% (5)
- 358 NDokument14 Seiten358 NGerardo BarbozaNoch keine Bewertungen
- Textbook: Digital Design, 6 - Edition: M. Morris Mano and Michael D. CilettiDokument74 SeitenTextbook: Digital Design, 6 - Edition: M. Morris Mano and Michael D. Ciletti林愷威Noch keine Bewertungen
- Ee201 Notes 5Dokument46 SeitenEe201 Notes 5adamwaiz100% (2)
- MODEL 633: Infra Red Safety Curtain For LiftsDokument4 SeitenMODEL 633: Infra Red Safety Curtain For LiftsPedro GonçalvesNoch keine Bewertungen
- Online Documentation For Altium Products - ( (High Speed Design in Altium Designer) ) - AD - 2018-10-26Dokument27 SeitenOnline Documentation For Altium Products - ( (High Speed Design in Altium Designer) ) - AD - 2018-10-26Marco I100% (1)
- Ec8691 Microprocessors and Microcontrollers LTPC3003 ObjectivesDokument2 SeitenEc8691 Microprocessors and Microcontrollers LTPC3003 ObjectivesAlwynNoch keine Bewertungen
- Current Controller For Stepping Motors: DescriptionDokument8 SeitenCurrent Controller For Stepping Motors: DescriptionNuno FilipeNoch keine Bewertungen
- Littelfuse SIDACtor DO 214 Datasheet PDFDokument5 SeitenLittelfuse SIDACtor DO 214 Datasheet PDFdvalinaNoch keine Bewertungen
- Adxl345 App Note An-1023Dokument28 SeitenAdxl345 App Note An-1023b0bb0bb0bNoch keine Bewertungen
- Chapter7 Input Output Organization PDFDokument19 SeitenChapter7 Input Output Organization PDFjijin kNoch keine Bewertungen
- AnalogICdesign-chapter5 - Current MirrorDokument28 SeitenAnalogICdesign-chapter5 - Current MirrorPhạm Đức ThuậnNoch keine Bewertungen