Das könnte Ihnen auch gefallen
- Weld AbilityDokument34 SeitenWeld AbilityGauthamSarangNoch keine Bewertungen
- Acom 3 2015Dokument13 SeitenAcom 3 2015Joshua WalkerNoch keine Bewertungen
- Welding Metallurgy - Detailed PDFDokument28 SeitenWelding Metallurgy - Detailed PDFkarcoepm100% (1)
- BS en ISO 11114-2 - Compatibility of MaterialsDokument26 SeitenBS en ISO 11114-2 - Compatibility of MaterialsAndy HowlettNoch keine Bewertungen
- Stress Corrosion Test of Copper AlloysDokument5 SeitenStress Corrosion Test of Copper AlloysRashedul HasanNoch keine Bewertungen
- Case Study (DM)Dokument28 SeitenCase Study (DM)Jai - Ho100% (1)
- Spot Welding of Advance High Strength Steels PDFDokument127 SeitenSpot Welding of Advance High Strength Steels PDFCharlesWilliamRichardNoch keine Bewertungen
- Arclog X Manual 1.19Dokument55 SeitenArclog X Manual 1.19davmac79Noch keine Bewertungen
- Dimensional Engineering: Based On The ASME Y14.5M-1994 Dimensioning and Tolerancing StandardDokument77 SeitenDimensional Engineering: Based On The ASME Y14.5M-1994 Dimensioning and Tolerancing StandardPankaj PatilNoch keine Bewertungen
- Friction Stir Welding of High Strength 7XXX Aluminum AlloysVon EverandFriction Stir Welding of High Strength 7XXX Aluminum AlloysNoch keine Bewertungen
- E 381 - 98 - Rtm4ms05oa - PDFDokument5 SeitenE 381 - 98 - Rtm4ms05oa - PDFAxel GozalezNoch keine Bewertungen
- Norwegian Oil and Gas Life Extension GuidelinesDokument20 SeitenNorwegian Oil and Gas Life Extension GuidelinesPar MadNoch keine Bewertungen
- Calibration-Validation - Good ArticleDokument12 SeitenCalibration-Validation - Good ArticleVijay KumarNoch keine Bewertungen
- Essentials of Report Writing - Application in BusinessDokument28 SeitenEssentials of Report Writing - Application in BusinessMahmudur Rahman75% (4)
- Iso Fdis15614 13 2021Dokument24 SeitenIso Fdis15614 13 2021arabsniperNoch keine Bewertungen
- Numerical Solution of Ordinary Differential EquationsDokument31 SeitenNumerical Solution of Ordinary Differential Equationschandu3072002100% (1)
- Lunch & Learn: Structural Steel SelectionDokument17 SeitenLunch & Learn: Structural Steel Selectionanuj SinghNoch keine Bewertungen
- 04-200-R1 Silicon Iron AnodesDokument2 Seiten04-200-R1 Silicon Iron Anodessams1101Noch keine Bewertungen
- Robotic WeldingDokument21 SeitenRobotic WeldingJuan BarronNoch keine Bewertungen
- Iiw 1693 05Dokument19 SeitenIiw 1693 05Pradip Goswami100% (1)
- Japan ShipbuildingDokument69 SeitenJapan Shipbuildingfilipescu_iNoch keine Bewertungen
- Racial Bias in Pulse Oximetry Measurement: CorrespondenceDokument2 SeitenRacial Bias in Pulse Oximetry Measurement: CorrespondenceYony Gutierrez100% (1)
- Brochure Roll Bonded Clad Plates EDokument36 SeitenBrochure Roll Bonded Clad Plates EAries MarteNoch keine Bewertungen
- BS en 1335-3-2009Dokument30 SeitenBS en 1335-3-2009Adel A. Abdelaziz100% (1)
- 00 Cover WE Rev2Dokument5 Seiten00 Cover WE Rev2ariyonodndiNoch keine Bewertungen
- Designing Quieter Hydraulic SystemsDokument25 SeitenDesigning Quieter Hydraulic Systemsbee140676Noch keine Bewertungen
- SOF IEO Sample Paper Class 4Dokument2 SeitenSOF IEO Sample Paper Class 4Rajesh RNoch keine Bewertungen
- Duplex Stainless Steel 2304 Spec Sheet for Weight Savings & Corrosion ResistanceDokument2 SeitenDuplex Stainless Steel 2304 Spec Sheet for Weight Savings & Corrosion ResistanceDeepak TdNoch keine Bewertungen
- AL 6XN SourceBookDokument56 SeitenAL 6XN SourceBookdrbeyerNoch keine Bewertungen
- Corrosion Resistance of High Nitrogen Steels PDFDokument27 SeitenCorrosion Resistance of High Nitrogen Steels PDFAnil Kumar TNoch keine Bewertungen
- Turbo CS 8 CO2 CorrosionDokument23 SeitenTurbo CS 8 CO2 CorrosionRonald GeorgeNoch keine Bewertungen
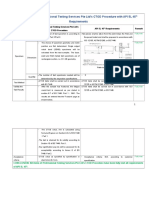
- Comparison of Professional Testing Services Pte Ltd's CTOD Procedure with API 5L 45th RequirementsDokument2 SeitenComparison of Professional Testing Services Pte Ltd's CTOD Procedure with API 5L 45th RequirementsMinh Vuong TranNoch keine Bewertungen
- IWS Welding Seminar on High Tensile and Temperature SteelDokument53 SeitenIWS Welding Seminar on High Tensile and Temperature SteelRaifan RaizerNoch keine Bewertungen
- Aws WJ 202009Dokument78 SeitenAws WJ 202009Fernando Emmanuel BenitezNoch keine Bewertungen
- Cylinders Valve ConnectionsDokument4 SeitenCylinders Valve ConnectionsJavier LerinNoch keine Bewertungen
- Instructions and Explanation of RequirementsDokument1 SeiteInstructions and Explanation of RequirementsAbu Anas M.SalaheldinNoch keine Bewertungen
- AutomationDokument5 SeitenAutomationashfaq_ahmed_7Noch keine Bewertungen
- As 4397-2007 Electroplated Coatings of Zinc On Steel Fasteners With Imperial ThreadsDokument9 SeitenAs 4397-2007 Electroplated Coatings of Zinc On Steel Fasteners With Imperial ThreadsSAI Global - APAC100% (1)
- Structure of Welded Joint and Cracking Phenomena in Steel WeldDokument27 SeitenStructure of Welded Joint and Cracking Phenomena in Steel WeldaunginternetNoch keine Bewertungen
- MIG Welding Aluminum TipsDokument34 SeitenMIG Welding Aluminum Tipscentaury2013Noch keine Bewertungen
- CH 06 - Corrosion & ErosionDokument22 SeitenCH 06 - Corrosion & ErosionvegaronNoch keine Bewertungen
- Astm Steel Pipes Pressure TemDokument6 SeitenAstm Steel Pipes Pressure Temfmfreire01Noch keine Bewertungen
- Weld Quality PDFDokument31 SeitenWeld Quality PDFNaceur TurkiNoch keine Bewertungen
- Astm A240 Uns S32205Dokument3 SeitenAstm A240 Uns S32205Mintone Sajayah BekabekaNoch keine Bewertungen
- Stainless steel tubing specificationDokument2 SeitenStainless steel tubing specificationTuấn Dương QuốcNoch keine Bewertungen
- Hand BookDokument300 SeitenHand BookGregEverett2Noch keine Bewertungen
- MSE 360 Materials Laboratory I-Fall 2010 Microscopy and Microstructure AnalysisDokument8 SeitenMSE 360 Materials Laboratory I-Fall 2010 Microscopy and Microstructure AnalysisFernando ParidisoNoch keine Bewertungen
- Presentation Volatile Organic Compounds FDokument20 SeitenPresentation Volatile Organic Compounds FVicente Scott100% (1)
- TWI Paper On Fatigue and GridingDokument42 SeitenTWI Paper On Fatigue and GridingKatsaras SotirisNoch keine Bewertungen
- Fitting and Tubing Inspection - Chim Sao WHPDokument14 SeitenFitting and Tubing Inspection - Chim Sao WHPnguyenbaohoangNoch keine Bewertungen
- Weldability of Thermo-Mechanically Rolled Steels Used in Oil and Gas Offshore StructuresDokument8 SeitenWeldability of Thermo-Mechanically Rolled Steels Used in Oil and Gas Offshore StructurestheijesNoch keine Bewertungen
- Ador BookletDokument22 SeitenAdor Bookletgssrraju0% (1)
- NDT of Welds - State of The ArtDokument7 SeitenNDT of Welds - State of The ArtElias JagielloNoch keine Bewertungen
- MIG Welding Aluminum Guide: Equipment, Settings & TechniquesDokument8 SeitenMIG Welding Aluminum Guide: Equipment, Settings & TechniquesHandri YantoNoch keine Bewertungen
- 10 1016@j Ijhydene 2020 02 035Dokument9 Seiten10 1016@j Ijhydene 2020 02 035TarunNoch keine Bewertungen
- CMT Short Circuit Metal TransferDokument3 SeitenCMT Short Circuit Metal Transferkarthick32mechNoch keine Bewertungen
- 6010 5P+ Welding Rod-LincolnDokument4 Seiten6010 5P+ Welding Rod-LincolnjanprakkeNoch keine Bewertungen
- ArcelorMittal DOMSpecsDokument12 SeitenArcelorMittal DOMSpecsAnurag DixitNoch keine Bewertungen
- Materials Challenges in Nuclear EnergyDokument24 SeitenMaterials Challenges in Nuclear EnergyW.t. HanNoch keine Bewertungen
- Diesel Engine Indicator Valves and AccessoriesDokument1 SeiteDiesel Engine Indicator Valves and AccessoriesJose Luis RattiaNoch keine Bewertungen
- Evaluation of Aluminum-Lithium Alloys 8090 and Weldalite-049Dokument39 SeitenEvaluation of Aluminum-Lithium Alloys 8090 and Weldalite-049skylancer-3441Noch keine Bewertungen
- Corrosion Failures: Theory, Case Studies, and SolutionsVon EverandCorrosion Failures: Theory, Case Studies, and SolutionsNoch keine Bewertungen
- 935 Ubi PBK Statement PDFDokument20 Seiten935 Ubi PBK Statement PDFTECHNO ACCOUNTNoch keine Bewertungen
- IPIECA - IOGP - The Global Distribution and Assessment of Major Oil Spill Response ResourcesDokument40 SeitenIPIECA - IOGP - The Global Distribution and Assessment of Major Oil Spill Response ResourcesОлегNoch keine Bewertungen
- Applied SciencesDokument25 SeitenApplied SciencesMario BarbarossaNoch keine Bewertungen
- Cross-Sectional Tomography: Oral and Maxillofacial RadiologyDokument7 SeitenCross-Sectional Tomography: Oral and Maxillofacial RadiologyPhanQuangHuyNoch keine Bewertungen
- M and S Code of ConductDokument43 SeitenM and S Code of ConductpeachdramaNoch keine Bewertungen
- High Volume InstrumentDokument15 SeitenHigh Volume Instrumentcario galleryNoch keine Bewertungen
- Raj Priya Civil Court Clerk FinalDokument1 SeiteRaj Priya Civil Court Clerk FinalRaj KamalNoch keine Bewertungen
- Ôn tập và kiểm tra học kì Tiếng anh 6 ĐÁP ÁNDokument143 SeitenÔn tập và kiểm tra học kì Tiếng anh 6 ĐÁP ÁNThùy TinaNoch keine Bewertungen
- FRP/HDPE septic tank specificationDokument2 SeitenFRP/HDPE septic tank specificationpeakfortuneNoch keine Bewertungen
- Ipaspro Co PPP ManualDokument78 SeitenIpaspro Co PPP ManualCarlos Alberto Mucching MendozaNoch keine Bewertungen
- Mod. 34 Classic Compact T06Dokument4 SeitenMod. 34 Classic Compact T06Jaime Li AliNoch keine Bewertungen
- PuppetsDokument11 SeitenPuppetsShar Nur JeanNoch keine Bewertungen
- Organized Educator Seeks New OpportunityDokument1 SeiteOrganized Educator Seeks New OpportunityCaren Pogoy ManiquezNoch keine Bewertungen
- Explosive Loading of Engineering Structures PDFDokument2 SeitenExplosive Loading of Engineering Structures PDFBillNoch keine Bewertungen
- Motor Operated ValveDokument6 SeitenMotor Operated ValveYosses Sang NahkodaNoch keine Bewertungen
- FALLSEM2019-20 STS4021 SS VL2019201000258 Reference Material I 11-Jul-2019 CAT1-4021-Integ-AS PDFDokument14 SeitenFALLSEM2019-20 STS4021 SS VL2019201000258 Reference Material I 11-Jul-2019 CAT1-4021-Integ-AS PDFjahnavi rajuNoch keine Bewertungen
- Texas LS Notes 19-20Dokument2 SeitenTexas LS Notes 19-20Jesus del CampoNoch keine Bewertungen
- India's 1991 Economic ReformsDokument5 SeitenIndia's 1991 Economic ReformsLive AspireNoch keine Bewertungen
- Blink CodesDokument3 SeitenBlink CodesNightin VargheseNoch keine Bewertungen
- Berserker - Lifting Wood and Stone Like A Viking Strongman Bodybuilding Functional StrengthDokument10 SeitenBerserker - Lifting Wood and Stone Like A Viking Strongman Bodybuilding Functional Strengthluciferr71Noch keine Bewertungen
- Dxgbvi Abdor Rahim OsmanmrDokument1 SeiteDxgbvi Abdor Rahim OsmanmrSakhipur TravelsNoch keine Bewertungen
- Candida by Shaw, George Bernard, 1856-1950Dokument61 SeitenCandida by Shaw, George Bernard, 1856-1950Gutenberg.orgNoch keine Bewertungen
- List of Psychotropic Drugs Under International ControlDokument32 SeitenList of Psychotropic Drugs Under International ControlRadhakrishana DuddellaNoch keine Bewertungen
- SBLO Jepp Charts PDFDokument12 SeitenSBLO Jepp Charts PDFElton CacefoNoch keine Bewertungen
- Canary TreatmentDokument117 SeitenCanary TreatmentRam KLNoch keine Bewertungen