Das könnte Ihnen auch gefallen
- Manual de Terapia Familiar SistemicaDokument68 SeitenManual de Terapia Familiar SistemicaPAUL77793% (15)
- Regresión LinealDokument6 SeitenRegresión LinealCynthia RamírezNoch keine Bewertungen
- Conducto RegularDokument10 SeitenConducto Regularwilson100% (1)
- Examen Tema 5Dokument9 SeitenExamen Tema 5Anonymous tpKwXoNoch keine Bewertungen
- Examen Unidad 2 Adminstracion de Los Procesos 1Dokument6 SeitenExamen Unidad 2 Adminstracion de Los Procesos 1andrea vera100% (5)
- Arduino + LabVIEWDokument114 SeitenArduino + LabVIEWrpcPC94% (17)
- Quiz 1-2-3 de Dinamica de SistemasDokument39 SeitenQuiz 1-2-3 de Dinamica de SistemasLaura White75% (4)
- 15 Formas de Dar Feedback A Los EstudiantesDokument3 Seiten15 Formas de Dar Feedback A Los EstudiantesordiziaNoch keine Bewertungen
- Tema 9Dokument10 SeitenTema 9potente14eNoch keine Bewertungen
- La PlaceDokument4 SeitenLa PlaceAglaé Gutierrez VelardeNoch keine Bewertungen
- Nyquist 1Dokument18 SeitenNyquist 1davemaster_unico12Noch keine Bewertungen
- Lenguaje de Programación CDokument16 SeitenLenguaje de Programación CSirWeigelNoch keine Bewertungen
- Presupuesto Del ProyectoDokument1 SeitePresupuesto Del ProyectoAglaé Gutierrez VelardeNoch keine Bewertungen
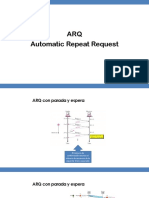
- ARQ Automatic Repeat RequestDokument8 SeitenARQ Automatic Repeat RequestAglaé Gutierrez VelardeNoch keine Bewertungen
- Curso - Seguridad en Sistemas de InformacionDokument661 SeitenCurso - Seguridad en Sistemas de InformacionMartin GoreNoch keine Bewertungen
- Tutorial Analisis y Control de Sistemas Usando MATLABDokument44 SeitenTutorial Analisis y Control de Sistemas Usando MATLABValmore CamachoNoch keine Bewertungen
- Analisis de PuestokDokument2 SeitenAnalisis de PuestokAglaé Gutierrez VelardeNoch keine Bewertungen
- Fuerza NeutraDokument33 SeitenFuerza NeutraOsiris MissyNoch keine Bewertungen
- 2 - Input - Output. RetroalimentaciónDokument6 Seiten2 - Input - Output. RetroalimentaciónMety MetyNoch keine Bewertungen
- El Principio Cibernético de InteracciónDokument4 SeitenEl Principio Cibernético de Interacciónjomava09100% (1)
- ACTIVIDAD 2 Gestion de Cambio OrganizacionalDokument9 SeitenACTIVIDAD 2 Gestion de Cambio OrganizacionalAlan VillarrealNoch keine Bewertungen
- Resumen Capítulo 4 - La Trama de La VidaDokument3 SeitenResumen Capítulo 4 - La Trama de La VidaFederico VillarrealNoch keine Bewertungen
- Disposiciones CRM ArgDokument31 SeitenDisposiciones CRM ArgMarcelo Fabian CasasNoch keine Bewertungen
- La RetroalimentacionDokument6 SeitenLa RetroalimentacionShila VillaorduñaNoch keine Bewertungen
- Las Organizaciones en Aprendizaje - PETER SENGE - La Quinta DisciplinaDokument10 SeitenLas Organizaciones en Aprendizaje - PETER SENGE - La Quinta DisciplinaGustavo NapoliNoch keine Bewertungen
- Eval.1 Sistemas ContablesDokument8 SeitenEval.1 Sistemas Contablesjhopsemar gonzalezNoch keine Bewertungen
- Simulink y MatlabDokument16 SeitenSimulink y MatlabSamuel Granados MejíaNoch keine Bewertungen
- Psi. de La Familia U1 (Unificado)Dokument62 SeitenPsi. de La Familia U1 (Unificado)CATHERINE ESTEFANIA URIBE SANCHEZNoch keine Bewertungen
- Tema 1. Introducción A Los Sistemas de Medida y RegulaciónDokument14 SeitenTema 1. Introducción A Los Sistemas de Medida y RegulaciónpepeNoch keine Bewertungen
- For-SSO-003 Informe Final de Investigacion Incidente MCPDokument34 SeitenFor-SSO-003 Informe Final de Investigacion Incidente MCPErick Moscoso BravoNoch keine Bewertungen
- Diccionario de TGSDokument4 SeitenDiccionario de TGSTerly Maxz Nad TuanamaNoch keine Bewertungen
- Control Motor en AVDDokument5 SeitenControl Motor en AVDPatricio Padilla RomeroNoch keine Bewertungen
- Kafka y CortazarDokument268 SeitenKafka y Cortazarcamisónmarisa50% (2)
- Osciladores Con Circuitos Con Realimentación RCDokument7 SeitenOsciladores Con Circuitos Con Realimentación RCPabloAnchundiaNoch keine Bewertungen
- Examen Direccion Comercial Uni.3 PDFDokument7 SeitenExamen Direccion Comercial Uni.3 PDFmaria jose millanNoch keine Bewertungen
- Manual de Verificación Interna PDFDokument33 SeitenManual de Verificación Interna PDFpajarito_victor11Noch keine Bewertungen
- Analisis de Sistemas IDokument189 SeitenAnalisis de Sistemas Icarlos páezNoch keine Bewertungen
- Resumen Subsistema de Provision de Recursos Humanos Reclutamiento - 1Dokument17 SeitenResumen Subsistema de Provision de Recursos Humanos Reclutamiento - 1Geovany MejiaNoch keine Bewertungen