Das könnte Ihnen auch gefallen
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Von EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Noch keine Bewertungen
- 8259 A FinalDokument52 Seiten8259 A FinalAnitha Joseph100% (1)
- 8259Dokument57 Seiten8259Vats Alok100% (1)
- B y Vijay Kumar. K Asst. Professor Dept. of ECEDokument30 SeitenB y Vijay Kumar. K Asst. Professor Dept. of ECEasmit guptaNoch keine Bewertungen
- EEE 311 Online Class 3Dokument5 SeitenEEE 311 Online Class 3KhairulNoch keine Bewertungen
- An Interrupt Is An Event Which Informs The CPU That Its Service (Action) Is Needed. - Sources of InterruptsDokument20 SeitenAn Interrupt Is An Event Which Informs The CPU That Its Service (Action) Is Needed. - Sources of InterruptsMurali KrishnaNoch keine Bewertungen
- 8259 ADokument16 Seiten8259 Aapi-26113146100% (1)
- Programmable Interrupt Controller (SUB: Microprocessor and Interfaces)Dokument7 SeitenProgrammable Interrupt Controller (SUB: Microprocessor and Interfaces)mohit mishraNoch keine Bewertungen
- INTEL 8259A Programmable Interrupt ControllerDokument19 SeitenINTEL 8259A Programmable Interrupt ControllerHimanshi SinghNoch keine Bewertungen
- Programmable Interrupt Controller (PIC) - 8259Dokument23 SeitenProgrammable Interrupt Controller (PIC) - 8259Arya ChandranNoch keine Bewertungen
- CH 13 PIC8259Dokument14 SeitenCH 13 PIC8259gokulchandru0% (1)
- 8259A Programmable Interrupt Controller: Segment 8BDokument31 Seiten8259A Programmable Interrupt Controller: Segment 8Bgebretensaymamu11Noch keine Bewertungen
- Lecture-51 INTEL 8259A Programmable Interrupt ControllerDokument7 SeitenLecture-51 INTEL 8259A Programmable Interrupt ControllerSahil KKNoch keine Bewertungen
- Where & How 8259 PIC Can Be Used To Handle Interrupts. The 8259A Programmable Interrupt ControllerDokument4 SeitenWhere & How 8259 PIC Can Be Used To Handle Interrupts. The 8259A Programmable Interrupt ControllerKuberjung ThapaNoch keine Bewertungen
- 8259 PicDokument6 Seiten8259 PicHarjot KaurNoch keine Bewertungen
- 8259 Programmable ControllerDokument44 Seiten8259 Programmable ControllerShilpa ShettyNoch keine Bewertungen
- 8259a Programmable Interrupt Controller 2Dokument42 Seiten8259a Programmable Interrupt Controller 2Tư Tưởng Tồi TànNoch keine Bewertungen
- 8259a Programmable Interrupt Controller 2Dokument42 Seiten8259a Programmable Interrupt Controller 2annushaNoch keine Bewertungen
- FALLSEM2022-23 CSE2006 ETH VL2022230103866 Reference Material I 08-09-2022 8259Dokument42 SeitenFALLSEM2022-23 CSE2006 ETH VL2022230103866 Reference Material I 08-09-2022 8259Gaurav Kumar SinghNoch keine Bewertungen
- 8259updatedd 141126060514 Conversion Gate02Dokument28 Seiten8259updatedd 141126060514 Conversion Gate02zelalem2022Noch keine Bewertungen
- FeaturesDokument8 SeitenFeaturesRoshan RajuNoch keine Bewertungen
- Lecture 7Dokument26 SeitenLecture 7ShazidNoch keine Bewertungen
- Lecture 2Dokument7 SeitenLecture 2tejashraj93Noch keine Bewertungen
- 8259A Programmable Interrupt ControllerDokument26 Seiten8259A Programmable Interrupt Controllerಗಿರೀಶ್ ಕುಮಾರ್ ನರುಗನಹಳ್ಳಿ ಗವಿರಂಗಯ್ಯNoch keine Bewertungen
- 8259a Programmable Interrupt ControllerDokument42 Seiten8259a Programmable Interrupt ControllerzarandijaNoch keine Bewertungen
- FPGA Implementation of Interrupt Controller (8259) by Using Verilog HDLDokument8 SeitenFPGA Implementation of Interrupt Controller (8259) by Using Verilog HDLjikaiyeNoch keine Bewertungen
- 8259A Pic-Block DiagramDokument16 Seiten8259A Pic-Block DiagramKarthikeyaNoch keine Bewertungen
- 8259 PIC: Intel's Prog. Interrupt ControllerDokument22 Seiten8259 PIC: Intel's Prog. Interrupt ControllerAsawari DudwadkarNoch keine Bewertungen
- Intel: 8259A Programmable Interrupt Controller (8259A/8259A-2)Dokument26 SeitenIntel: 8259A Programmable Interrupt Controller (8259A/8259A-2)Thành Phố BuồnNoch keine Bewertungen
- Microprocessor and Interfacing: Authors:Ramesh.S.Gaonkar Badri Ram Douglas.V.Hall Liu and GibsonDokument52 SeitenMicroprocessor and Interfacing: Authors:Ramesh.S.Gaonkar Badri Ram Douglas.V.Hall Liu and Gibsonavireddy1Noch keine Bewertungen
- Programmable Interrupt Controller 8259 V1 3rd AprilDokument24 SeitenProgrammable Interrupt Controller 8259 V1 3rd Aprilvikash yadavNoch keine Bewertungen
- 8259 Complete NotesDokument34 Seiten8259 Complete NotesAntra GurainNoch keine Bewertungen
- Programmable Interrupt Controller: Submitted ToDokument15 SeitenProgrammable Interrupt Controller: Submitted ToCSE7 NDUBNoch keine Bewertungen
- Interrupt and Interfacing of 8086Dokument12 SeitenInterrupt and Interfacing of 8086vreshmi885113Noch keine Bewertungen
- 8259 Programmable Interrupt ControllerDokument15 Seiten8259 Programmable Interrupt ControllerramkumarrajaNoch keine Bewertungen
- Lecture - 9 & 10pin Diagram 8085Dokument24 SeitenLecture - 9 & 10pin Diagram 8085no fake NewsNoch keine Bewertungen
- 8259 PicDokument14 Seiten8259 PicRahul AshokNoch keine Bewertungen
- Unit 5Dokument8 SeitenUnit 5kaavya shruthiNoch keine Bewertungen
- 8259A Programmable Interrupt ControllerDokument18 Seiten8259A Programmable Interrupt ControllerBasheer V.PNoch keine Bewertungen
- Unit Ii Hardware Interfacing With Intel 8085Dokument44 SeitenUnit Ii Hardware Interfacing With Intel 8085Basheer V.PNoch keine Bewertungen
- Unit 2 PDFDokument44 SeitenUnit 2 PDFprashantvlsiNoch keine Bewertungen
- Programmable Interrupt Controller: By, Hitha Paulson Assistant Professor, Dept of Computer Science LF College, GuruvayoorDokument23 SeitenProgrammable Interrupt Controller: By, Hitha Paulson Assistant Professor, Dept of Computer Science LF College, GuruvayoorSudeeksha GanguliNoch keine Bewertungen
- 8259 Programmable Interrupt Controller T.Srikrishna, M.SC, M.Tech, GVPDokument4 Seiten8259 Programmable Interrupt Controller T.Srikrishna, M.SC, M.Tech, GVPAbhayNoch keine Bewertungen
- Module III - Stack and InterruptsDokument15 SeitenModule III - Stack and InterruptsSNEHA MARIYA TOMNoch keine Bewertungen
- WINSEM2021-22 CSE2006 ETH VL2021220503993 Reference Material I 10-02-2022 8259Dokument33 SeitenWINSEM2021-22 CSE2006 ETH VL2021220503993 Reference Material I 10-02-2022 8259Saksham GargNoch keine Bewertungen
- 8259 Microprocessor: Some Features of This MicroprocessorDokument6 Seiten8259 Microprocessor: Some Features of This Microprocessorabu sayedNoch keine Bewertungen
- Embedded System Auto Saved)Dokument21 SeitenEmbedded System Auto Saved)Shivani PandeyNoch keine Bewertungen
- Avr Risc MicrocontrollerDokument11 SeitenAvr Risc MicrocontrollerAmy OliverNoch keine Bewertungen
- 8259 Pic PDFDokument3 Seiten8259 Pic PDFpravin kumarNoch keine Bewertungen
- Computer Architecture: Dr. Ammar AltameemiDokument16 SeitenComputer Architecture: Dr. Ammar Altameemiesmatawad shareefNoch keine Bewertungen
- Question Bank For MPDokument38 SeitenQuestion Bank For MPmekalajesiNoch keine Bewertungen
- Unit 4 - Microprocessor & Its Application - WWW - Rgpvnotes.inDokument9 SeitenUnit 4 - Microprocessor & Its Application - WWW - Rgpvnotes.inJayesh JoshiNoch keine Bewertungen
- Microprocessor Lab Manual - FinalDokument47 SeitenMicroprocessor Lab Manual - FinalPatel manav PatelNoch keine Bewertungen
- CMOS Priority Interrupt Controller: Features DescriptionDokument20 SeitenCMOS Priority Interrupt Controller: Features DescriptionWilliamfelix FelixNoch keine Bewertungen
- Intel 8259a PicDokument24 SeitenIntel 8259a Picmohitsingh316Noch keine Bewertungen
- Making PIC Microcontroller Instruments and ControllersVon EverandMaking PIC Microcontroller Instruments and ControllersNoch keine Bewertungen
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Von EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Noch keine Bewertungen
- 1 - Ethics in JournalismDokument44 Seiten1 - Ethics in JournalismSugunaNoch keine Bewertungen
- Chapter 5Dokument47 SeitenChapter 5SugunaNoch keine Bewertungen
- Inter Coder ADD C3 P 101Dokument1 SeiteInter Coder ADD C3 P 101SugunaNoch keine Bewertungen
- A Log Periodic Series-Fed Antennas Array Design Using A Simple Transmission Line ModelDokument10 SeitenA Log Periodic Series-Fed Antennas Array Design Using A Simple Transmission Line ModelSugunaNoch keine Bewertungen
- Chapter 6Dokument34 SeitenChapter 6SugunaNoch keine Bewertungen
- Bibliography Articles:: Daily Newspapers in Southern Nigeria.' (Online) Available atDokument36 SeitenBibliography Articles:: Daily Newspapers in Southern Nigeria.' (Online) Available atSugunaNoch keine Bewertungen
- Chapter 1Dokument41 SeitenChapter 1SugunaNoch keine Bewertungen
- Review of LiteratureDokument22 SeitenReview of LiteratureSugunaNoch keine Bewertungen
- Data Analysis: Table 4 Details of No. of Sample As Per DailyDokument70 SeitenData Analysis: Table 4 Details of No. of Sample As Per DailySugunaNoch keine Bewertungen
- Appendix II: Sampling Procedure. While Selecting The Sample, Keeping in View The Time andDokument8 SeitenAppendix II: Sampling Procedure. While Selecting The Sample, Keeping in View The Time andSugunaNoch keine Bewertungen
- Appendix - I: Samacharam (Rajahmundry) and Vishalandhra (Vijaywada)Dokument12 SeitenAppendix - I: Samacharam (Rajahmundry) and Vishalandhra (Vijaywada)SugunaNoch keine Bewertungen
- Chpater V InterviewsDokument14 SeitenChpater V InterviewsSugunaNoch keine Bewertungen
- Chapter VI FindingsDokument34 SeitenChapter VI FindingsSugunaNoch keine Bewertungen
- Chapter IVDokument80 SeitenChapter IVSugunaNoch keine Bewertungen
- Chapter IIIDokument11 SeitenChapter IIISugunaNoch keine Bewertungen
- Chapter 3Dokument23 SeitenChapter 3SugunaNoch keine Bewertungen
- Chapter 4Dokument27 SeitenChapter 4SugunaNoch keine Bewertungen
- Political Parties and Elections in India: An OverviewDokument62 SeitenPolitical Parties and Elections in India: An OverviewSugunaNoch keine Bewertungen
- Appendix I: Profile of Political PartiesDokument14 SeitenAppendix I: Profile of Political PartiesSugunaNoch keine Bewertungen
- Evolution of Political Journalism in India: A Literature ReviewDokument46 SeitenEvolution of Political Journalism in India: A Literature ReviewSugunaNoch keine Bewertungen
- Annexure - I Bonafide Certificate: Head of The Department Chief Warden PrincipalDokument1 SeiteAnnexure - I Bonafide Certificate: Head of The Department Chief Warden PrincipalSugunaNoch keine Bewertungen
- N l0 Ne B: Detection of Rauar Signals in NoiseDokument2 SeitenN l0 Ne B: Detection of Rauar Signals in NoiseSugunaNoch keine Bewertungen
- Appendix II: Profiles of NewspapersDokument9 SeitenAppendix II: Profiles of NewspapersSugunaNoch keine Bewertungen
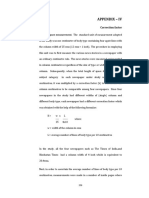
- Appendix - Iv: Units of Space Measurement. The Standard Unit of Measurement AdoptedDokument2 SeitenAppendix - Iv: Units of Space Measurement. The Standard Unit of Measurement AdoptedSugunaNoch keine Bewertungen
- Aakanksha Final ThesisDokument258 SeitenAakanksha Final ThesisSugunaNoch keine Bewertungen
- P (Y) P (Y - SN) P (SN) + P (Y - N) P (S) : Detection of Radar Signals in Noise 37$"""Dokument2 SeitenP (Y) P (Y - SN) P (SN) + P (Y - N) P (S) : Detection of Radar Signals in Noise 37$"""SugunaNoch keine Bewertungen
- Material Specifications Cell: Technical Specification OFDokument8 SeitenMaterial Specifications Cell: Technical Specification OFkajale.shrikantNoch keine Bewertungen
- Internal Guide:-Mrs. A.A. Askhedkar: by Dikita Chauhan Amita Joshi & Anuja KaradkhedkarDokument33 SeitenInternal Guide:-Mrs. A.A. Askhedkar: by Dikita Chauhan Amita Joshi & Anuja KaradkhedkarMohit ChauhanNoch keine Bewertungen
- IOT Practical File KOT 551Dokument46 SeitenIOT Practical File KOT 551qz5jq94yh2Noch keine Bewertungen
- Scott Baxter TotalDokument721 SeitenScott Baxter TotalSatish BabuNoch keine Bewertungen
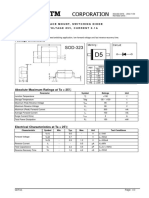
- Datasheet PDFDokument2 SeitenDatasheet PDFAknova TsaniataNoch keine Bewertungen
- Felcom 16 Service Part 1Dokument75 SeitenFelcom 16 Service Part 1emilio gustavo saez duroNoch keine Bewertungen
- Traffic EngineeringDokument5 SeitenTraffic EngineeringaclNoch keine Bewertungen
- Nptel Electrical MachinesDokument7 SeitenNptel Electrical MachinesVinodkumarNoch keine Bewertungen
- DeviceNet OverviewV2Dokument15 SeitenDeviceNet OverviewV2Kristal NewtonNoch keine Bewertungen
- Connect: SYSTEM BUTTON and Set The OUTPUT MODE AccordinglyDokument2 SeitenConnect: SYSTEM BUTTON and Set The OUTPUT MODE AccordinglyAlexis CárdenasNoch keine Bewertungen
- Electronic Parts Symbols Labeling and ApplicationDokument23 SeitenElectronic Parts Symbols Labeling and ApplicationRonald ConstantinoNoch keine Bewertungen
- Dc-Em3000 Eng PDFDokument2 SeitenDc-Em3000 Eng PDFbac100% (1)
- Hasee HP500 Laptop SchematicsDokument41 SeitenHasee HP500 Laptop SchematicsbrunnofranklinNoch keine Bewertungen
- Data Link LayerDokument9 SeitenData Link LayerFarhana AijazNoch keine Bewertungen
- Sony m720 mbx-182 Foxconn m720-1-01 Rev 0.1 SCH PDFDokument56 SeitenSony m720 mbx-182 Foxconn m720-1-01 Rev 0.1 SCH PDFGeovanny Agreda100% (1)
- Value Added Course - 2020-21 BatchDokument2 SeitenValue Added Course - 2020-21 BatchSUPRIYA PRAJAPATINoch keine Bewertungen
- About The Eprom-SwitchDokument6 SeitenAbout The Eprom-SwitchKiss MartinNoch keine Bewertungen
- Lab-4: DC Bridges: 1. ObjectiveDokument12 SeitenLab-4: DC Bridges: 1. ObjectiveAsad RazaNoch keine Bewertungen
- Analog Ch5 Multistage AmplifierDokument12 SeitenAnalog Ch5 Multistage Amplifierskgupta4281Noch keine Bewertungen
- Yamaha NSC 103 Owners ManualDokument2 SeitenYamaha NSC 103 Owners ManualRalie RalevNoch keine Bewertungen
- CH 10Dokument45 SeitenCH 10hjhjhj ghhjhNoch keine Bewertungen
- BSC Course ContentsDokument4 SeitenBSC Course ContentsAns MehmoodNoch keine Bewertungen
- Uidigi+New ParadigmDokument29 SeitenUidigi+New ParadigmClaudio ChiconNoch keine Bewertungen
- 360 s9 Manual BookDokument31 Seiten360 s9 Manual BookoblomirNoch keine Bewertungen
- Ra890f ManualDokument11 SeitenRa890f ManualbenjaminNoch keine Bewertungen
- No Load Test On Single Phase Induction MotorDokument1 SeiteNo Load Test On Single Phase Induction Motorg3v5Noch keine Bewertungen
- Optimization of The Crest Factor For Complex-ValueDokument9 SeitenOptimization of The Crest Factor For Complex-Valuegahopa1479Noch keine Bewertungen
- Gps Module DatasheetDokument13 SeitenGps Module DatasheetBrian TaylorNoch keine Bewertungen
- Power Supply and Security Alarm ProjectDokument29 SeitenPower Supply and Security Alarm ProjectDhruv Gupta100% (1)
- SAD Unit 4 Real Time Systems1Dokument20 SeitenSAD Unit 4 Real Time Systems1onesnoneNoch keine Bewertungen