Das könnte Ihnen auch gefallen
- The Force Method For Analysis of Staticaly Indeterminate StructuresDokument12 SeitenThe Force Method For Analysis of Staticaly Indeterminate StructuresPhay gaen CH - K24Noch keine Bewertungen
- Engineering MechanicsDokument121 SeitenEngineering MechanicsSuresh BalamNoch keine Bewertungen
- Part - I: Subjective Questions: Section (A) : Type of Forces, Newton's Third Law, Free Body DiagramDokument27 SeitenPart - I: Subjective Questions: Section (A) : Type of Forces, Newton's Third Law, Free Body DiagramPriyanshu sharmaNoch keine Bewertungen
- Structural Analysis - I PDFDokument128 SeitenStructural Analysis - I PDFArun KumarNoch keine Bewertungen
- Equations of Equilibrium (2D) : 440:221 Intro To Engineering Mechanics: StaticsDokument21 SeitenEquations of Equilibrium (2D) : 440:221 Intro To Engineering Mechanics: StaticsVatsal PandyaNoch keine Bewertungen
- Equilibrium Forces in Trusses and FramesDokument2 SeitenEquilibrium Forces in Trusses and FramesEduardo Flores LudeñaNoch keine Bewertungen
- Mechanics of Solids and Deformable Bodies GuideDokument433 SeitenMechanics of Solids and Deformable Bodies GuideBOOMERaNG boomNoch keine Bewertungen
- Statics ReviewDokument59 SeitenStatics Reviewmike smithNoch keine Bewertungen
- 3.1. ProblemsDokument20 Seiten3.1. Problemssaumya irugalbandaraNoch keine Bewertungen
- STATICS ProblemsDokument6 SeitenSTATICS Problemsdesertfox1943Noch keine Bewertungen
- Chapter 4 Equilibrium PF Rigid Body & ForceDokument61 SeitenChapter 4 Equilibrium PF Rigid Body & ForceIsabelNoch keine Bewertungen
- FrictionDokument31 SeitenFrictionDeepanshu SharmaNoch keine Bewertungen
- StaticsC08 Friction PDFDokument42 SeitenStaticsC08 Friction PDFAbdelkader MabroukNoch keine Bewertungen
- Friction - Class PresentationDokument68 SeitenFriction - Class Presentationtimothy ezraNoch keine Bewertungen
- Friction: Prepared By: Engr. Lucia V. Ortega 8/28/20Dokument21 SeitenFriction: Prepared By: Engr. Lucia V. Ortega 8/28/20Joren JamesNoch keine Bewertungen
- Lecture 19Dokument36 SeitenLecture 19castles15Noch keine Bewertungen
- Lecture 33 Solving Rigid-Body Equilibrium ProblemsDokument21 SeitenLecture 33 Solving Rigid-Body Equilibrium ProblemsYamiyoNoch keine Bewertungen
- Rigid Body Equilibrium and Free Body DiagramsDokument44 SeitenRigid Body Equilibrium and Free Body DiagramsDipanshu SharmaNoch keine Bewertungen
- LECTURE 3 - StructuresDokument31 SeitenLECTURE 3 - StructuresALBERT MALIRONoch keine Bewertungen
- Eg 231 Tutorial Sheet 1Q - 230118 - 105359Dokument19 SeitenEg 231 Tutorial Sheet 1Q - 230118 - 105359NINEBO MWEWANoch keine Bewertungen
- Chapter 8-: Rotational MotionDokument34 SeitenChapter 8-: Rotational MotionSaadNoch keine Bewertungen
- Topic3 FrictionDokument60 SeitenTopic3 FrictionFakrul AimanNoch keine Bewertungen
- Lesson 2 Resultant of Force SystemDokument26 SeitenLesson 2 Resultant of Force SystemRainiel MontalbaNoch keine Bewertungen
- ME211 Week3Dokument56 SeitenME211 Week3bm7gyygjtfNoch keine Bewertungen
- CH 4 Force System ResultantDokument50 SeitenCH 4 Force System ResultantSyahrul Nizam AnuarNoch keine Bewertungen
- Statics tutorial sheet moment calculationsDokument6 SeitenStatics tutorial sheet moment calculationsnageshNoch keine Bewertungen
- Tutorials 1 5Dokument7 SeitenTutorials 1 5faizankhan260690Noch keine Bewertungen
- Chapter 2pptDokument116 SeitenChapter 2pptyohannes lemiNoch keine Bewertungen
- WINSEM2019-20 MEE1002 TH VL2019205001888 Reference Material I 27-Jan-2020 FrictionDokument76 SeitenWINSEM2019-20 MEE1002 TH VL2019205001888 Reference Material I 27-Jan-2020 FrictionArkadeep MukherjeeNoch keine Bewertungen
- Lecture #02: Moments, Couples, and Force Couple SystemsDokument71 SeitenLecture #02: Moments, Couples, and Force Couple SystemsRajueswarNoch keine Bewertungen
- Force and Moment CalculationsDokument34 SeitenForce and Moment CalculationsaayushNoch keine Bewertungen
- 6B Circular Motion & Gravitation 2020-2021Dokument46 Seiten6B Circular Motion & Gravitation 2020-2021RandominicNoch keine Bewertungen
- Review ProblemsDokument5 SeitenReview ProblemsALI KHALED EL-MESSARYNoch keine Bewertungen
- Friction MMDokument40 SeitenFriction MMMAHVISH SADAFNoch keine Bewertungen
- Equilibrium of Rigid BodyDokument41 SeitenEquilibrium of Rigid BodyJaya KarthigaaNoch keine Bewertungen
- Mechanical Engineering Forces and Moments AssignmentDokument2 SeitenMechanical Engineering Forces and Moments AssignmentHari OmNoch keine Bewertungen
- Me 2560 Practice Problems Test I I I RecitationDokument3 SeitenMe 2560 Practice Problems Test I I I RecitationJohnNoch keine Bewertungen
- Question Sheet2 PDFDokument15 SeitenQuestion Sheet2 PDFSaumyak RajNoch keine Bewertungen
- CE 214 - Forces and Equilibrium ProblemsDokument6 SeitenCE 214 - Forces and Equilibrium Problemsstats12Noch keine Bewertungen
- Solid MechanicsDokument19 SeitenSolid MechanicsManoj ManoharanNoch keine Bewertungen
- Engineering Mechanics Force CalculationsDokument14 SeitenEngineering Mechanics Force CalculationsAlok KumarNoch keine Bewertungen
- Mechanics LongDokument5 SeitenMechanics Longsivaraju8Noch keine Bewertungen
- Forces required to move block with frictionDokument55 SeitenForces required to move block with frictionrashmarsvNoch keine Bewertungen
- Equillibrium of Non Concurrent Coplanar SystemDokument17 SeitenEquillibrium of Non Concurrent Coplanar Systemsalman husainNoch keine Bewertungen
- Tutorial Sheet 4.1 Chapter 4Dokument6 SeitenTutorial Sheet 4.1 Chapter 4schoolboy51Noch keine Bewertungen
- Rotational DynamicsDokument12 SeitenRotational DynamicsRaju SinghNoch keine Bewertungen
- PHY5113 TUTORIAL N0 3 Questions PDFDokument9 SeitenPHY5113 TUTORIAL N0 3 Questions PDFAlbertNoch keine Bewertungen
- Mechanics I ENGR141 Tutorial Sheet I: Dr. Amr AdelDokument6 SeitenMechanics I ENGR141 Tutorial Sheet I: Dr. Amr AdelEsmael ElgendyNoch keine Bewertungen
- Mech Chapter 06Dokument62 SeitenMech Chapter 06abhiNoch keine Bewertungen
- Statics Review ProblemsDokument22 SeitenStatics Review ProblemsAbdulazeez Abiola0% (1)
- Statics problems forces trigonometry components equilibriumDokument18 SeitenStatics problems forces trigonometry components equilibriumguilherminhobbzinhoNoch keine Bewertungen
- Dom Unit-2Dokument22 SeitenDom Unit-2kumareshNoch keine Bewertungen
- Particle Dynamics (QB)Dokument38 SeitenParticle Dynamics (QB)dymeowkyNoch keine Bewertungen
- Lame and Particle 2D 3D 1Dokument2 SeitenLame and Particle 2D 3D 1Syed ShaulNoch keine Bewertungen
- Tutorial 2-Equilibrium 1Dokument2 SeitenTutorial 2-Equilibrium 1Sai KrishnaNoch keine Bewertungen
- Unit - III FrictionDokument40 SeitenUnit - III FrictionTapaTap BOLTENoch keine Bewertungen
- Mechanics of Structures: Force Method for Statically Indeterminate StructuresDokument44 SeitenMechanics of Structures: Force Method for Statically Indeterminate StructuresHào KiệtNoch keine Bewertungen
- Measure Theory NotesDokument83 SeitenMeasure Theory Notesydarman.appenNoch keine Bewertungen
- AGM For Elliptic Curves: DTU (Copenhagen) September 2005Dokument40 SeitenAGM For Elliptic Curves: DTU (Copenhagen) September 2005sushmapalimarNoch keine Bewertungen
- An Introduction to O-Minimal Geometry (INTRO-OMINDokument82 SeitenAn Introduction to O-Minimal Geometry (INTRO-OMINVermo FouqueNoch keine Bewertungen
- Thong Ke Bve FULL OFFDokument2 SeitenThong Ke Bve FULL OFFPhay gaen CH - K24Noch keine Bewertungen
- Thong Ke Bve FULL OFFDokument2 SeitenThong Ke Bve FULL OFFPhay gaen CH - K24Noch keine Bewertungen
- F1 - OfficeDokument19 SeitenF1 - OfficePhay gaen CH - K24Noch keine Bewertungen
- Thong Ke Bve FULL OFFDokument2 SeitenThong Ke Bve FULL OFFPhay gaen CH - K24Noch keine Bewertungen
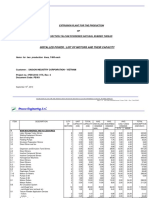
- Installed Power: List of Motors and Their Capacity: Extrusion Plant For The ProductionDokument6 SeitenInstalled Power: List of Motors and Their Capacity: Extrusion Plant For The ProductionPhay gaen CH - K24Noch keine Bewertungen
- Chuong 2 p6 Forced Vib Tai Tong QuatDokument24 SeitenChuong 2 p6 Forced Vib Tai Tong QuatPhay gaen CH - K24Noch keine Bewertungen
- Principles of Reinforced Concrete Design: July 2014Dokument8 SeitenPrinciples of Reinforced Concrete Design: July 2014Phay gaen CH - K24Noch keine Bewertungen
- Principles of Reinforced Concrete Design: July 2014Dokument8 SeitenPrinciples of Reinforced Concrete Design: July 2014Phay gaen CH - K24Noch keine Bewertungen
- C6Dokument15 SeitenC6Phay gaen CH - K24Noch keine Bewertungen
- F1 - CanteenDokument14 SeitenF1 - CanteenPhay gaen CH - K24Noch keine Bewertungen
- 3D Analysis of RC Frames Using Effective-Stiffness ModelsDokument8 Seiten3D Analysis of RC Frames Using Effective-Stiffness ModelsPhay gaen CH - K24Noch keine Bewertungen
- A Comparative Study On Effectiveness of Using Horasan Mortar As A Pure Friction Sliding Interface MaterialDokument6 SeitenA Comparative Study On Effectiveness of Using Horasan Mortar As A Pure Friction Sliding Interface MaterialPhay gaen CH - K24Noch keine Bewertungen
- The Force Method For Analysis of Staticaly Indeterminate StructuresDokument44 SeitenThe Force Method For Analysis of Staticaly Indeterminate StructuresPhay gaen CH - K24Noch keine Bewertungen
- The Combined Method For Analysis of Staticaly Indeterminate StructuresDokument6 SeitenThe Combined Method For Analysis of Staticaly Indeterminate StructuresPhay gaen CH - K24Noch keine Bewertungen
- Chapter 7Dokument1 SeiteChapter 7Phay gaen CH - K24Noch keine Bewertungen
- Bai Bao Phuoc Thi PDFDokument9 SeitenBai Bao Phuoc Thi PDFPhay gaen CH - K24Noch keine Bewertungen
- Structural Mechanics Lectures OverviewDokument40 SeitenStructural Mechanics Lectures OverviewPhay gaen CH - K24Noch keine Bewertungen
- Analysis of Internal Forces in Statically Determinate Structures Due To Moving LoadsDokument12 SeitenAnalysis of Internal Forces in Statically Determinate Structures Due To Moving LoadsPhay gaen CH - K24Noch keine Bewertungen
- Displacement of Structures: PurposesDokument13 SeitenDisplacement of Structures: PurposesPhay gaen CH - K24Noch keine Bewertungen
- Multi tuned liquid dampers reduce structure vibrationDokument16 SeitenMulti tuned liquid dampers reduce structure vibrationanon_427517856Noch keine Bewertungen
- Homework 10Dokument11 SeitenHomework 10Phay gaen CH - K24Noch keine Bewertungen
- Analysis of internal forces in statically determinate structuresDokument9 SeitenAnalysis of internal forces in statically determinate structuresPhay gaen CH - K24Noch keine Bewertungen
- Structural Mechanics Lectures OverviewDokument40 SeitenStructural Mechanics Lectures OverviewPhay gaen CH - K24Noch keine Bewertungen
- Multi tuned liquid dampers reduce structure vibrationDokument16 SeitenMulti tuned liquid dampers reduce structure vibrationanon_427517856Noch keine Bewertungen
- Numerical Dynamic Analysis of Stiffened Plates Under Blast Loading PDFDokument15 SeitenNumerical Dynamic Analysis of Stiffened Plates Under Blast Loading PDFPhay gaen CH - K24Noch keine Bewertungen
- Homework 2Dokument2 SeitenHomework 2Brian SmithNoch keine Bewertungen
- Muro H2.00Dokument9 SeitenMuro H2.00HugoChocNoch keine Bewertungen
- 23 Wind TurbineDokument3 Seiten23 Wind TurbineHarishNoch keine Bewertungen
- BOQ Pengumuman 1065.RKSDokument2 SeitenBOQ Pengumuman 1065.RKSDangolNoch keine Bewertungen
- Entropy Problems AnswersDokument6 SeitenEntropy Problems AnswersTots HolaresNoch keine Bewertungen
- Ariston Lbe 8 X 80269690000Dokument80 SeitenAriston Lbe 8 X 80269690000frNoch keine Bewertungen
- Lifting Bails PDFDokument1 SeiteLifting Bails PDFJoaoNoch keine Bewertungen
- Stress Classification of Blind FlangeDokument13 SeitenStress Classification of Blind FlangepajadhavNoch keine Bewertungen
- 5 Port Solenoid Valve: Reduced Power ConsumptionDokument60 Seiten5 Port Solenoid Valve: Reduced Power ConsumptionkrisornNoch keine Bewertungen
- Artigo - Professor EduardoDokument10 SeitenArtigo - Professor EduardoAndré Guimarães LóssNoch keine Bewertungen
- AWWA Tapping SleevesDokument21 SeitenAWWA Tapping SleevesdanilobossuNoch keine Bewertungen
- Inst Headers Install TitianDokument3 SeitenInst Headers Install TitianhuntersgreenNoch keine Bewertungen
- 26 49493 A Shim Plate: 16.04.2018 09.03.2018 MB CBDokument1 Seite26 49493 A Shim Plate: 16.04.2018 09.03.2018 MB CBAlfonso LópezNoch keine Bewertungen
- Shear Walls and Diaphragms PDFDokument76 SeitenShear Walls and Diaphragms PDFCharbel Saad SaadNoch keine Bewertungen
- 9ni 4coDokument102 Seiten9ni 4cosunsirNoch keine Bewertungen
- SM - 3 TransmissionDokument397 SeitenSM - 3 TransmissionJanNoch keine Bewertungen
- 1018Dokument1 Seite1018Alonso ReynaNoch keine Bewertungen
- RK-2001E2 English TraductionDokument2 SeitenRK-2001E2 English TraductionwxcvbnnbvcxwNoch keine Bewertungen
- Solution To Quiz 1 Fluid MechanicsDokument7 SeitenSolution To Quiz 1 Fluid MechanicsMark Augusto V. AgusNoch keine Bewertungen
- Product GuideDokument26 SeitenProduct GuideGio gioNoch keine Bewertungen
- Meenakshi Polymers 4M Change InspectionDokument4 SeitenMeenakshi Polymers 4M Change InspectionKaran Malhi100% (1)
- Chapter 6 Theory of Flexure PDFDokument88 SeitenChapter 6 Theory of Flexure PDFcoded coderNoch keine Bewertungen
- Kayaba MedidasDokument24 SeitenKayaba MedidasPilar TorquemadaNoch keine Bewertungen
- Engine 310G 310SGDokument7 SeitenEngine 310G 310SGANDRES BAZURTONoch keine Bewertungen
- 03 Nissan Maxima Engine ControlDokument738 Seiten03 Nissan Maxima Engine ControlHaus El Muflih Aflaha100% (1)
- Washer - ISO 7093-1-2000Dokument9 SeitenWasher - ISO 7093-1-2000Corneliu VilcuNoch keine Bewertungen
- Allison MT (B) 640, 643, 650, 653 Series On-Highway Transmissions Parts CatalogDokument6 SeitenAllison MT (B) 640, 643, 650, 653 Series On-Highway Transmissions Parts CatalogMarcos LunaNoch keine Bewertungen
- 1981 PitfallsDokument44 Seiten1981 Pitfallsengineer_atulNoch keine Bewertungen
- Edmund Charlton Academic TranscriptDokument2 SeitenEdmund Charlton Academic TranscriptCharlton EddieNoch keine Bewertungen
- Powerex Bombas de Vacio Vane Montado en Tanque ManualDokument64 SeitenPowerex Bombas de Vacio Vane Montado en Tanque ManualHugovillarruelNoch keine Bewertungen
- Eccentric Check (28-08-17) - Alson Rev.1 PDFDokument2 SeitenEccentric Check (28-08-17) - Alson Rev.1 PDFAlsonChinNoch keine Bewertungen