Das könnte Ihnen auch gefallen
- Stewart Platform: Auto-Segregating DustbinDokument6 SeitenStewart Platform: Auto-Segregating DustbinlikhitNoch keine Bewertungen
- C. GarbageDokument8 SeitenC. GarbageKhobragade PornimaNoch keine Bewertungen
- 8 IV April 2020Dokument8 Seiten8 IV April 2020Sagar SanasNoch keine Bewertungen
- Glass Cleaning Robot: Guide-Dr. Swet Chandan Presented by (Group-22)Dokument29 SeitenGlass Cleaning Robot: Guide-Dr. Swet Chandan Presented by (Group-22)MRITYUNJOY GUPTANoch keine Bewertungen
- WaterspaceDokument43 SeitenWaterspaceAndrew Quitmeyer100% (1)
- Solar Powerd Water Surface Garbage Collecting BoatDokument3 SeitenSolar Powerd Water Surface Garbage Collecting BoatAhsan KhanNoch keine Bewertungen
- Praveen 2020 IOP Conf. Ser. Mater. Sci. Eng. 993 012030Dokument7 SeitenPraveen 2020 IOP Conf. Ser. Mater. Sci. Eng. 993 012030vivin rajNoch keine Bewertungen
- Unmanned Floating Waste Collecting Robot FinaaalDokument10 SeitenUnmanned Floating Waste Collecting Robot FinaaalErven UmbaoNoch keine Bewertungen
- Swachh Hasth-A Water Cleaning RobotDokument5 SeitenSwachh Hasth-A Water Cleaning RobotrakibsofficialNoch keine Bewertungen
- Safe Act and Unsafe ActDokument19 SeitenSafe Act and Unsafe ActshivuNoch keine Bewertungen
- Project Phase-2 AnkDokument16 SeitenProject Phase-2 AnkSudip NeupaneNoch keine Bewertungen
- Sample Skill Project ReportDokument15 SeitenSample Skill Project ReportstangocapNoch keine Bewertungen
- Cornell Notes On RobotsDokument8 SeitenCornell Notes On RobotsSharonNoch keine Bewertungen
- A Water Surface Cleaning RobotDokument6 SeitenA Water Surface Cleaning RobotAmna JunaidNoch keine Bewertungen
- WSDRFDokument16 SeitenWSDRFLorene CorderoNoch keine Bewertungen
- Surface Water Garbage and Oil (Swago)Dokument22 SeitenSurface Water Garbage and Oil (Swago)Ydilyn Blanco FalsarioNoch keine Bewertungen
- Beach SweeperDokument7 SeitenBeach SweeperDyon kenley UyNoch keine Bewertungen
- BFP Template 2023-URGDokument7 SeitenBFP Template 2023-URGMohameed AhmedNoch keine Bewertungen
- ArchitectureDokument5 SeitenArchitectureVivek PatvaNoch keine Bewertungen
- Thesis: Amaravati Marina and Yacht Club, AmaravatiDokument10 SeitenThesis: Amaravati Marina and Yacht Club, AmaravatiSHASHWAT GUPTANoch keine Bewertungen
- Idea/Approach DetailsDokument5 SeitenIdea/Approach Detailsapi-509892537Noch keine Bewertungen
- Self Evaluating Hydro BlastingDokument11 SeitenSelf Evaluating Hydro Blastingmmd BusinessNoch keine Bewertungen
- Design and Fabrication of Robotic Trash Boat To Drive and Harvest Floating Trash in DrainagesDokument6 SeitenDesign and Fabrication of Robotic Trash Boat To Drive and Harvest Floating Trash in DrainagesTharun KumarNoch keine Bewertungen
- Aqua Drone Ieee PaperDokument3 SeitenAqua Drone Ieee PaperAkash ShahuNoch keine Bewertungen
- IJCRT2305299Dokument4 SeitenIJCRT2305299denip78233Noch keine Bewertungen
- Effects of Poseidon in A CanalDokument7 SeitenEffects of Poseidon in A CanalRey VillarbaNoch keine Bewertungen
- StemprojectwteachersDokument8 SeitenStemprojectwteachersapi-357364909Noch keine Bewertungen
- Project Proposal 2-1Dokument28 SeitenProject Proposal 2-1Otim geoffrey okotNoch keine Bewertungen
- Project Cleansweep Team WriteupDokument5 SeitenProject Cleansweep Team WriteupTony NguyenNoch keine Bewertungen
- IoT Based Bot For Flood Water Cleaning and TreatmentDokument7 SeitenIoT Based Bot For Flood Water Cleaning and TreatmentIJRASETPublicationsNoch keine Bewertungen
- Design and Construction of An Underwater Robot: September 2017Dokument5 SeitenDesign and Construction of An Underwater Robot: September 2017Kenneth UtiNoch keine Bewertungen
- Automatic Controlled Arduino Robot VacuumDokument19 SeitenAutomatic Controlled Arduino Robot VacuumAzhea Blanca SajulNoch keine Bewertungen
- 7 Paper - 45-A - Review - of - A - Biomimicry - Swimming - RobotDokument11 Seiten7 Paper - 45-A - Review - of - A - Biomimicry - Swimming - RobotMichael CabanillasNoch keine Bewertungen
- Literature Review of Pedal Powered Washing MachineDokument7 SeitenLiterature Review of Pedal Powered Washing MachinemgojgerifNoch keine Bewertungen
- River Float Waste Cleaning AutomationDokument6 SeitenRiver Float Waste Cleaning AutomationSreekanth PagadapalliNoch keine Bewertungen
- E1JSE6 2012 v4n4 335Dokument18 SeitenE1JSE6 2012 v4n4 335Linh LyNoch keine Bewertungen
- Eco Ship Concept: Term Paper Introduction To Marine TechnologyDokument11 SeitenEco Ship Concept: Term Paper Introduction To Marine TechnologyDevanda GheanNoch keine Bewertungen
- Robotic Fish: Mini ProjectDokument13 SeitenRobotic Fish: Mini ProjectSankeerthiniNoch keine Bewertungen
- Design and Analysis of River Water Cleaning MachineDokument6 SeitenDesign and Analysis of River Water Cleaning MachineNavratan JagnadeNoch keine Bewertungen
- Green Ship Recycle Yard DesignDokument7 SeitenGreen Ship Recycle Yard DesignManraj SinghNoch keine Bewertungen
- Beach CleanerDokument12 SeitenBeach CleanerDyon kenley UyNoch keine Bewertungen
- Multipurpose Cleaning RobotDokument5 SeitenMultipurpose Cleaning RobotVISHAL ARAVINTH S S (RA2211047010024)Noch keine Bewertungen
- PortPIC2022 - Hamburg ProceedingDokument157 SeitenPortPIC2022 - Hamburg ProceedingxtraluxinteriorNoch keine Bewertungen
- TARP Final Report (Group 6)Dokument18 SeitenTARP Final Report (Group 6)shashwatNoch keine Bewertungen
- UWR23 Technical GuideDokument7 SeitenUWR23 Technical GuideOmar MedhatNoch keine Bewertungen
- Final Project ProposalDokument4 SeitenFinal Project ProposalSavindu NanayakkaraNoch keine Bewertungen
- Design & Construction of River Cleaning MechanismDokument5 SeitenDesign & Construction of River Cleaning MechanismInternational Journal of Innovative Science and Research Technology100% (1)
- Agricultural and Beach Cleaning RobotDokument20 SeitenAgricultural and Beach Cleaning RobotChaitanya ShirodkarNoch keine Bewertungen
- Unmanned Floating Waste Collecting Robot..Dokument6 SeitenUnmanned Floating Waste Collecting Robot..Erven Micabalo UmbaoNoch keine Bewertungen
- Describe The Most Difficult Technical Problem You Have Had To SolveDokument4 SeitenDescribe The Most Difficult Technical Problem You Have Had To SolvecemekaobiNoch keine Bewertungen
- Project ProposalDokument2 SeitenProject Proposalfergus0% (1)
- An Iot-Based Water Monitoring Collection Robot System and A Floating WasteDokument10 SeitenAn Iot-Based Water Monitoring Collection Robot System and A Floating WasteMark ReyesNoch keine Bewertungen
- Name: Ralph Fergus Compendio Section: 11 - Our Lady of Lourdes - HUMMSDokument2 SeitenName: Ralph Fergus Compendio Section: 11 - Our Lady of Lourdes - HUMMSfergusNoch keine Bewertungen
- Porouse Concret 6th Sem Project - AllDokument22 SeitenPorouse Concret 6th Sem Project - AllVaibhav 2401Noch keine Bewertungen
- Remote Controlled Unmanned River Cleaning Bot IJERTV10IS030314Dokument4 SeitenRemote Controlled Unmanned River Cleaning Bot IJERTV10IS030314Rao RaoNoch keine Bewertungen
- Design and Fabrication of River Waste Collector-IJAERDV05I0387211Dokument6 SeitenDesign and Fabrication of River Waste Collector-IJAERDV05I0387211ankushNoch keine Bewertungen
- Design of A Compact ROV For River Exploration: Avilash Sahoo Santosha K. Dwivedy P. S. RobiDokument6 SeitenDesign of A Compact ROV For River Exploration: Avilash Sahoo Santosha K. Dwivedy P. S. RobiManuel Diaz Gomez100% (1)
- Marine Smart Trash (New)Dokument5 SeitenMarine Smart Trash (New)king syNoch keine Bewertungen
- New Technologies for Emission Control in Marine Diesel EnginesVon EverandNew Technologies for Emission Control in Marine Diesel EnginesNoch keine Bewertungen
- CLS Plastic SolutionsDokument20 SeitenCLS Plastic SolutionsMarc LucasNoch keine Bewertungen
- Ballistol Story EnglischDokument8 SeitenBallistol Story Englischspp2000Noch keine Bewertungen
- Environmental Planning Laws and AnalysisDokument4 SeitenEnvironmental Planning Laws and AnalysisEdmond BakingNoch keine Bewertungen
- ICSE GeographyDokument7 SeitenICSE Geographysubhasedu0% (1)
- 5in Comet ShellDokument8 Seiten5in Comet Shellolindo d'andreaNoch keine Bewertungen
- QDokument6 SeitenQrenzoNoch keine Bewertungen
- Msds CuSO4.5H2ODokument6 SeitenMsds CuSO4.5H2OFebrina Tri NarantiNoch keine Bewertungen
- 2010 - Slum - Lab - Sao Paulo Architecture Experiment PDFDokument88 Seiten2010 - Slum - Lab - Sao Paulo Architecture Experiment PDFSarah Felippe100% (1)
- ATU / SBR Systems: RuralDokument2 SeitenATU / SBR Systems: RuralMarcel MrcNoch keine Bewertungen
- Indian Standard: Glossary of Terms Relating To River Valley ProjectsDokument41 SeitenIndian Standard: Glossary of Terms Relating To River Valley ProjectsGREYHOUND ENGINEERS INDIA INDIA PVT.LTDNoch keine Bewertungen
- Isol Job Reference 2008-2017 PDFDokument9 SeitenIsol Job Reference 2008-2017 PDFAbu Zafeera Saqib SipahiNoch keine Bewertungen
- For Each of The Following Questions, Choose The Option Which Fits Best To What You Hear. (10ps)Dokument3 SeitenFor Each of The Following Questions, Choose The Option Which Fits Best To What You Hear. (10ps)Như NguyễnNoch keine Bewertungen
- QP Spec For Pre-Commissioning and New Commissioning of New Pipelines (QP-SPC-L-012-R1)Dokument29 SeitenQP Spec For Pre-Commissioning and New Commissioning of New Pipelines (QP-SPC-L-012-R1)RajeshwariNoch keine Bewertungen
- Secondary Clarifier DesignDokument3 SeitenSecondary Clarifier DesignBESMA SAYOUDNoch keine Bewertungen
- Analysis and Modification On Effluent Treatment Plant A Case StudyDokument4 SeitenAnalysis and Modification On Effluent Treatment Plant A Case StudyRaaz The ghostNoch keine Bewertungen
- Answer All Questions. Each Questions Is Followed by Four Options, A, B, C, and D. For Each Question, Choose One Answer OnlyDokument4 SeitenAnswer All Questions. Each Questions Is Followed by Four Options, A, B, C, and D. For Each Question, Choose One Answer OnlyFarid HajisNoch keine Bewertungen
- ASTM D513 Co2 Total y Disuelto en AguaDokument8 SeitenASTM D513 Co2 Total y Disuelto en AguaFamc CmafNoch keine Bewertungen
- Republic of The Philippines Cordillera Administrative Region Province of Abra Municipality of VillaviciosaDokument1 SeiteRepublic of The Philippines Cordillera Administrative Region Province of Abra Municipality of VillaviciosaAllan dave BaclangenNoch keine Bewertungen
- Sea Transport of Liquid Chemicals in Bulk PDFDokument131 SeitenSea Transport of Liquid Chemicals in Bulk PDFDiana MoralesNoch keine Bewertungen
- Key 502 B MSDSDokument4 SeitenKey 502 B MSDSIleana RodríguezNoch keine Bewertungen
- 31 Home Remedies To Reduce Unwanted Face FatDokument12 Seiten31 Home Remedies To Reduce Unwanted Face FatRueth Annafeye100% (1)
- Environmental Science 7 4th QuarterDokument30 SeitenEnvironmental Science 7 4th QuarterBill FernandoNoch keine Bewertungen
- 1 Plumbing DefinitionDokument18 Seiten1 Plumbing DefinitionVikram DhabaleNoch keine Bewertungen
- Kubeta TalksDokument26 SeitenKubeta TalksRandy AñonuevoNoch keine Bewertungen
- TNT880 TKNDokument6 SeitenTNT880 TKNFrancisco BonaNoch keine Bewertungen
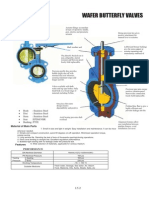
- Wafer Butterfly ValvesDokument2 SeitenWafer Butterfly ValvesSandi AslanNoch keine Bewertungen
- Benefits and Applications of NanotechDokument10 SeitenBenefits and Applications of NanotechShaniana MartinezNoch keine Bewertungen
- Eco-Friendly Technologies: A PresentationDokument51 SeitenEco-Friendly Technologies: A Presentationrupeshpanda92Noch keine Bewertungen
- Green Water On Ship-Type Offshore Structures: Bas BuchnerDokument284 SeitenGreen Water On Ship-Type Offshore Structures: Bas BuchnerNANTHAKUMAR GANESANNoch keine Bewertungen
- Testing and Commissioning Procedure: 2007 EDITIONDokument38 SeitenTesting and Commissioning Procedure: 2007 EDITIONChokri ChakiirNoch keine Bewertungen
- IPPTA 144-67-68 Paper Mills in VapiDokument2 SeitenIPPTA 144-67-68 Paper Mills in VapiajantaiNoch keine Bewertungen