Das könnte Ihnen auch gefallen
- M475 - c2 - L4 - Z TransformDokument8 SeitenM475 - c2 - L4 - Z TransformAli AlmakhmariNoch keine Bewertungen
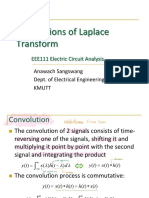
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDokument29 SeitenApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNoch keine Bewertungen
- Z Transform PrimerDokument11 SeitenZ Transform Primerveicastaneda14Noch keine Bewertungen
- Chapter3 STDokument99 SeitenChapter3 STHoang TranNoch keine Bewertungen
- 9 IirDokument28 Seiten9 IirMekonen AberaNoch keine Bewertungen
- M475 - c2 - L8 - Discrete Time ModelingDokument8 SeitenM475 - c2 - L8 - Discrete Time ModelingAli AlmakhmariNoch keine Bewertungen
- Transformada ZDokument17 SeitenTransformada Znikika1Noch keine Bewertungen
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDokument28 SeitenYn Ayn Aynn BXN BXNN: Recursive FiltersNikita ShakyaNoch keine Bewertungen
- Digital Control SystemsDokument82 SeitenDigital Control SystemsMuthuraj BoseNoch keine Bewertungen
- Yn Ayn Aynn BXN BXNN: Recursive FiltersDokument28 SeitenYn Ayn Aynn BXN BXNN: Recursive FiltersHarreniNoch keine Bewertungen
- Z Transform SummaryDokument3 SeitenZ Transform SummaryJesse SekenNoch keine Bewertungen
- Z Transform SummaryDokument3 SeitenZ Transform SummaryJesse SekenNoch keine Bewertungen
- Tablica Transformacija PDFDokument1 SeiteTablica Transformacija PDFvelikidrmrdrNoch keine Bewertungen
- M475 c2 L7 EmulationDokument11 SeitenM475 c2 L7 EmulationAli AlmakhmariNoch keine Bewertungen
- UCSB MATH 5C Problems 1 SolutionsDokument4 SeitenUCSB MATH 5C Problems 1 SolutionsAaron ひろき ZhangNoch keine Bewertungen
- Yn Ayn Ayn N BXN BXN N: Recursive FiltersDokument28 SeitenYn Ayn Ayn N BXN BXN N: Recursive FiltersnikshithNoch keine Bewertungen
- Institute of Electrical and Electronic EngineeringDokument48 SeitenInstitute of Electrical and Electronic EngineeringКдйікі КциNoch keine Bewertungen
- Z Transformacije PDFDokument2 SeitenZ Transformacije PDFamilaNoch keine Bewertungen
- Unit1 PDFDokument72 SeitenUnit1 PDFRiddhijit ChattopadhyayNoch keine Bewertungen
- Formules Commande NumériqueDokument5 SeitenFormules Commande Numériquekacsam08Noch keine Bewertungen
- 4 - System Time ResponseDokument16 Seiten4 - System Time ResponseAndrewAbdelmassiehNoch keine Bewertungen
- Z Plane AnalizDokument47 SeitenZ Plane Analizysm111Noch keine Bewertungen
- Control 11 4 PDFDokument16 SeitenControl 11 4 PDFMais SarayraNoch keine Bewertungen
- Chapter 3 Fourier Series1Dokument40 SeitenChapter 3 Fourier Series1EyobNoch keine Bewertungen
- Formula SheetDokument4 SeitenFormula Sheetgeyoxi5098Noch keine Bewertungen
- Notes 14 6382 Gamma FunctionDokument20 SeitenNotes 14 6382 Gamma FunctionbomidiyashwanthkumarNoch keine Bewertungen
- Signals and SystemsDokument9 SeitenSignals and SystemsKrishna MishraNoch keine Bewertungen
- Chapter 5a Z-TransformDokument55 SeitenChapter 5a Z-Transformfarina ilyanaNoch keine Bewertungen
- Multicarrier Transmission Systems: S MaxDokument9 SeitenMulticarrier Transmission Systems: S MaxlonlinnessNoch keine Bewertungen
- Lecture 3 Modeling (Ii) - State Space ApproachDokument19 SeitenLecture 3 Modeling (Ii) - State Space ApproachAum4Eng HelpNoch keine Bewertungen
- Lecture 14Dokument15 SeitenLecture 14gprem89Noch keine Bewertungen
- 6 Fourier SeriesDokument43 Seiten6 Fourier SeriesutpNoch keine Bewertungen
- Zero Order HoldDokument19 SeitenZero Order HoldSn ProfNoch keine Bewertungen
- Discrete Hilbert Transform: 7 April 2007 Digital Signal Processing I Islamic University of GazaDokument27 SeitenDiscrete Hilbert Transform: 7 April 2007 Digital Signal Processing I Islamic University of GazadeepthiNoch keine Bewertungen
- The Z-Transform and Its Roc Properties: - ObjectivesDokument11 SeitenThe Z-Transform and Its Roc Properties: - ObjectivesJane LitouwNoch keine Bewertungen
- Supplementary SummerDokument7 SeitenSupplementary Summer张琳Noch keine Bewertungen
- Introduction To Laplace TransformsDokument32 SeitenIntroduction To Laplace TransformsAd Man GeTigNoch keine Bewertungen
- EDI ProblemDokument5 SeitenEDI ProblemluciaNoch keine Bewertungen
- 2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHDokument4 Seiten2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHYassine DjillaliNoch keine Bewertungen
- Reconstruction PDFDokument13 SeitenReconstruction PDFRamaDinakaranNoch keine Bewertungen
- Introduction To Time Series Analysis: Gloria González-Rivera and Jesús Gonzalo U. Carlos III de MadridDokument25 SeitenIntroduction To Time Series Analysis: Gloria González-Rivera and Jesús Gonzalo U. Carlos III de MadridTiliksew Wudie AssabeNoch keine Bewertungen
- Formulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Dokument11 SeitenFormulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Bader AlShakhatrahNoch keine Bewertungen
- 1 Sine Integral: Some Special FunctionsDokument34 Seiten1 Sine Integral: Some Special FunctionsZubayer AhmedNoch keine Bewertungen
- MATH2374 Section7 2Dokument4 SeitenMATH2374 Section7 2kdNoch keine Bewertungen
- Fourier series (FS) : ∞ k jkω t k T −jkω tDokument4 SeitenFourier series (FS) : ∞ k jkω t k T −jkω tarashixNoch keine Bewertungen
- Sol Exam 2006Dokument12 SeitenSol Exam 2006mustafaNoch keine Bewertungen
- 5Dokument61 Seiten5ahmed salimNoch keine Bewertungen
- Properties of The Laplace Transform: - ObjectivesDokument11 SeitenProperties of The Laplace Transform: - ObjectivesBala Samuvel JosephNoch keine Bewertungen
- Discrete-Time Systems: Discretization, Models and Their PropertiesDokument66 SeitenDiscrete-Time Systems: Discretization, Models and Their PropertiesbalkyderNoch keine Bewertungen
- ECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 20-Jan-2014, Room H101Dokument18 SeitenECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 20-Jan-2014, Room H101Eduardo FerreiraNoch keine Bewertungen
- Solution of Assignment 1Dokument3 SeitenSolution of Assignment 1dioumbNoch keine Bewertungen
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDokument72 SeitenKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNoch keine Bewertungen
- Formula Notes Control Systems Final 74 13 PDFDokument13 SeitenFormula Notes Control Systems Final 74 13 PDFTed StinsonNoch keine Bewertungen
- P20 IIR Filters Part3Dokument33 SeitenP20 IIR Filters Part3Harold GealanNoch keine Bewertungen
- CH 07Dokument51 SeitenCH 07陳浚維Noch keine Bewertungen
- Lecture 2Dokument12 SeitenLecture 2Lucas SantosNoch keine Bewertungen
- Fourier Series PresentationDokument81 SeitenFourier Series PresentationRajithNimali100% (1)
- HW - 2 Solutions (Draft)Dokument6 SeitenHW - 2 Solutions (Draft)Hamid RasulNoch keine Bewertungen
- (Non-Periodic Signals) : Fourier TransformDokument33 Seiten(Non-Periodic Signals) : Fourier TransformPragya ChakshooNoch keine Bewertungen
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Von EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Noch keine Bewertungen
- Method For The Estimation of The Mean Lorentzian Bandwidth in Spectra Composed of An Unknown Number of Highly Overlapped BandsDokument12 SeitenMethod For The Estimation of The Mean Lorentzian Bandwidth in Spectra Composed of An Unknown Number of Highly Overlapped BandsHassan El-kholyNoch keine Bewertungen
- LAB BJT Current CircuitsDokument7 SeitenLAB BJT Current CircuitsHassan El-kholyNoch keine Bewertungen
- Assignment 1modDokument2 SeitenAssignment 1modHassan El-kholyNoch keine Bewertungen
- DigitalDesignStudy TemplateDokument3 SeitenDigitalDesignStudy TemplateHassan El-kholyNoch keine Bewertungen
- Your Project Plan ReportDokument18 SeitenYour Project Plan ReportHassan El-kholyNoch keine Bewertungen
- Final Report - Multibody Dynamics of A Formula Student Car (2 Years Ago)Dokument57 SeitenFinal Report - Multibody Dynamics of A Formula Student Car (2 Years Ago)Hassan El-kholyNoch keine Bewertungen
- Design of High Gain Folded-Cascode Operational Amplifier Using 1.25 Um CMOSDokument9 SeitenDesign of High Gain Folded-Cascode Operational Amplifier Using 1.25 Um CMOSHassan El-kholyNoch keine Bewertungen
- (10-21) Simulation of Grid Intgrated PV Array For-Format For ZenodoDokument12 Seiten(10-21) Simulation of Grid Intgrated PV Array For-Format For ZenodoHassan El-kholyNoch keine Bewertungen
- Optimum Photovoltaic Array Size For A Hybrid Wind/PV SystemDokument7 SeitenOptimum Photovoltaic Array Size For A Hybrid Wind/PV SystemHassan El-kholyNoch keine Bewertungen
- Practical Cas Code AmplifierDokument5 SeitenPractical Cas Code AmplifierHassan El-kholyNoch keine Bewertungen
- Power StationsDokument16 SeitenPower StationsHassan El-kholyNoch keine Bewertungen
- Design and Simulation of 4T-Cascode Amplifier at 45 Nanometer Technology NodeDokument4 SeitenDesign and Simulation of 4T-Cascode Amplifier at 45 Nanometer Technology NodeHassan El-kholyNoch keine Bewertungen
- 3-Obtain A Mechanical Analog of The Liquid-Level System.: Let Us DefineDokument3 Seiten3-Obtain A Mechanical Analog of The Liquid-Level System.: Let Us DefineHassan El-kholyNoch keine Bewertungen
- Electrical Power and Control Department Automatic Control Code: Sheet 2 Topic: Electrical & Electronic System Modeling Level 3 Date: 25/2/2017Dokument2 SeitenElectrical Power and Control Department Automatic Control Code: Sheet 2 Topic: Electrical & Electronic System Modeling Level 3 Date: 25/2/2017Hassan El-kholyNoch keine Bewertungen
- Electrical Power and Control Department Automatic Control Code: Sheet 1 Topic: Laplace Transform Level 3 Date: 11/11/2014Dokument1 SeiteElectrical Power and Control Department Automatic Control Code: Sheet 1 Topic: Laplace Transform Level 3 Date: 11/11/2014Hassan El-kholyNoch keine Bewertungen
- Continuous Probability Distribution.Dokument10 SeitenContinuous Probability Distribution.Hassan El-kholy100% (1)
- Chapter 1 (Fits and Tolerance)Dokument49 SeitenChapter 1 (Fits and Tolerance)Hassan El-kholyNoch keine Bewertungen
- Sheet 7 Routh Stability CriterionDokument1 SeiteSheet 7 Routh Stability CriterionHassan El-kholyNoch keine Bewertungen
- Sheet 3 (Transformer Tests)Dokument1 SeiteSheet 3 (Transformer Tests)Hassan El-kholyNoch keine Bewertungen
- Sheet 3 (Circle Diagram)Dokument1 SeiteSheet 3 (Circle Diagram)Hassan El-kholyNoch keine Bewertungen
- Lab Experiment For Transfer Function of Ac Servo MotorDokument9 SeitenLab Experiment For Transfer Function of Ac Servo MotorHassan El-kholyNoch keine Bewertungen
- L2 Modeling and Simulation of Motor Speed BMMP 2343Dokument6 SeitenL2 Modeling and Simulation of Motor Speed BMMP 2343Lk BanNoch keine Bewertungen
- Quilt: An XML Query Language For Heterogeneous Data Sources: Don Chamberlin Jonathan Robie Daniela FlorescuDokument10 SeitenQuilt: An XML Query Language For Heterogeneous Data Sources: Don Chamberlin Jonathan Robie Daniela FlorescuMagda AvagyanNoch keine Bewertungen
- 479-0244-Anybus Communicator CAN PROFINET-IO User ManualDokument89 Seiten479-0244-Anybus Communicator CAN PROFINET-IO User ManualvarunshyamNoch keine Bewertungen
- GIS Module: GMS 8.0 TutorialDokument11 SeitenGIS Module: GMS 8.0 TutorialAlexandre Pimenta100% (1)
- 8086 Lab ProgramsDokument6 Seiten8086 Lab ProgramsWalter White0% (1)
- Infix To PostfixDokument27 SeitenInfix To PostfixbrainyhamzaNoch keine Bewertungen
- Quiz 1 - Domain Modeling With Answer KeyDokument5 SeitenQuiz 1 - Domain Modeling With Answer Keyprincess100267% (3)
- Source Code Management Using IBM Rational Team ConcertDokument56 SeitenSource Code Management Using IBM Rational Team ConcertSoundar Srinivasan0% (1)
- Lecture - 15 Dynamic Interconnection NetworksDokument13 SeitenLecture - 15 Dynamic Interconnection NetworksmohsinmanzoorNoch keine Bewertungen
- Pega Test Topics - ActivitiesDokument6 SeitenPega Test Topics - ActivitiesWilsmith SmithNoch keine Bewertungen
- 229 Data Entry OperationDokument8 Seiten229 Data Entry OperationVinoth RockerNoch keine Bewertungen
- How To Install Microsoft Hyper-V On HP ProLiant C-Class Server BladesDokument24 SeitenHow To Install Microsoft Hyper-V On HP ProLiant C-Class Server BladesAndré CunhaNoch keine Bewertungen
- Published By: National Electrical Manufacturers AssociationDokument21 SeitenPublished By: National Electrical Manufacturers AssociationJuhani Mikael KumaraNoch keine Bewertungen
- Secure CommunicationsDokument11 SeitenSecure CommunicationsharrisboyNoch keine Bewertungen
- SQL Injection - Wikipedia, The Free Encyclopedia PDFDokument10 SeitenSQL Injection - Wikipedia, The Free Encyclopedia PDFxdownloadxNoch keine Bewertungen
- Perl Programming: David SchweikertDokument14 SeitenPerl Programming: David SchweikertkartheekbNoch keine Bewertungen
- String Art IinstructionsDokument2 SeitenString Art Iinstructionsapi-240963149Noch keine Bewertungen
- 01p SQLDokument8 Seiten01p SQLTEJWANT SOOKHOONoch keine Bewertungen
- Vtiger Test CaseDokument9 SeitenVtiger Test Caseprasikumar0% (1)
- Object-Oriented Programming ConceptsDokument9 SeitenObject-Oriented Programming ConceptsRemi-RolandOladayoRolandNoch keine Bewertungen
- Game LogDokument27 SeitenGame LogMihai MalosNoch keine Bewertungen
- Cockroach DBDokument37 SeitenCockroach DBMayur PatilNoch keine Bewertungen
- Red Hat Certificate of Expertise in Server Hardening ExamDokument2 SeitenRed Hat Certificate of Expertise in Server Hardening ExamskizoufriNoch keine Bewertungen
- XML and Web Technologies For Data Sciences With R-Springer-Verlag New York (2014)Dokument677 SeitenXML and Web Technologies For Data Sciences With R-Springer-Verlag New York (2014)Carlos Barco100% (1)
- Appin Technology Lab (Network Security Courses)Dokument21 SeitenAppin Technology Lab (Network Security Courses)Appin Technology LabNoch keine Bewertungen
- Admin GuideDokument112 SeitenAdmin Guideapi-3722405Noch keine Bewertungen
- Usefull Aix Commands-1Dokument8 SeitenUsefull Aix Commands-1sts100Noch keine Bewertungen
- Last Lecture: Introduction To Sequential Logic and SystemsDokument9 SeitenLast Lecture: Introduction To Sequential Logic and SystemsSatya RajNoch keine Bewertungen
- Custom 501 Pre SoDokument88 SeitenCustom 501 Pre SoAlexToaderNoch keine Bewertungen
- Database ManagementDokument51 SeitenDatabase ManagementJersey RamosNoch keine Bewertungen