Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- SW Chapter 21 KeyDokument9 SeitenSW Chapter 21 KeykylevNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The 50 Most Inspiring Travel Quotes of All TimeDokument4 SeitenThe 50 Most Inspiring Travel Quotes of All Timeungku1Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Learning Guide: Central Texas College Department of NursingDokument26 SeitenLearning Guide: Central Texas College Department of Nursingapi-3697326Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Boil-Off Gas CalculationsDokument14 SeitenBoil-Off Gas CalculationsAlberto100% (1)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Vital Judo Throwing TechniquesDokument193 SeitenVital Judo Throwing TechniquesJuan Jose Opazo Carvajal100% (1)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Six Types of Simple MachinesDokument4 SeitenThe Six Types of Simple MachinesmarroNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Industrial Training Report (Kapar Power Plant)Dokument40 SeitenIndustrial Training Report (Kapar Power Plant)Hakeemi Baseri100% (2)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
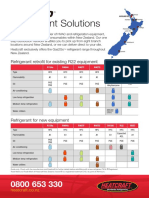
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentDokument2 SeitenRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- School: Grade Level: Teacher: Section Teaching Dates and Time: QuarterDokument3 SeitenSchool: Grade Level: Teacher: Section Teaching Dates and Time: QuarterZeny Aquino DomingoNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Responsible Living: Mantri DevelopersDokument15 SeitenResponsible Living: Mantri Developersnadaf8Noch keine Bewertungen
- Versana Premier Transducer GuideDokument4 SeitenVersana Premier Transducer GuideDigo OtávioNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- BÀI TẬP TA 9 THEO CHUYÊN ĐỀ NGỮ PHÁPDokument213 SeitenBÀI TẬP TA 9 THEO CHUYÊN ĐỀ NGỮ PHÁPhoangmaiNoch keine Bewertungen
- Unit-3 DC Machines IMP QuestionsDokument30 SeitenUnit-3 DC Machines IMP Questionskrishna Sai Atla VenkataNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- 8v92ta DetroitDokument554 Seiten8v92ta Detroit10000389% (9)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Cutawaytechnical453465436 5464356 345634 653456 34563 4563563 645635634 6Dokument8 SeitenCutawaytechnical453465436 5464356 345634 653456 34563 4563563 645635634 6rseresfer34533373563Noch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Omyacarb 1t TNDokument1 SeiteOmyacarb 1t TNGİZEM DEMİRNoch keine Bewertungen
- Orona Fault CodesDokument19 SeitenOrona Fault CodesDanushka Bandara100% (1)
- Qualitest Canada BrochureDokument7 SeitenQualitest Canada BrochureBala SingamNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Anti-Cellulite: Endermologie TreatmentDokument8 SeitenAnti-Cellulite: Endermologie TreatmentMinu CatalinNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Dead Zone I Air AgeDokument7 SeitenDead Zone I Air AgeJaponec PicturesNoch keine Bewertungen
- Chapter 3 Deflection of Beams - Conjugate Beam MethodDokument6 SeitenChapter 3 Deflection of Beams - Conjugate Beam MethodMbali MagagulaNoch keine Bewertungen
- Rightship Ship Inspection Questionnaire RISQDokument177 SeitenRightship Ship Inspection Questionnaire RISQИгорь100% (3)
- Photography Techniques (Intermediate)Dokument43 SeitenPhotography Techniques (Intermediate)Truc Nguyen100% (2)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Correlation of Body Mass Index With Endometrial Histopathology in Abnormal Uterine BleedingDokument101 SeitenCorrelation of Body Mass Index With Endometrial Histopathology in Abnormal Uterine BleedingpritamNoch keine Bewertungen
- Sunday Afternoon, October 27, 2013: TechnologyDokument283 SeitenSunday Afternoon, October 27, 2013: TechnologyNatasha MyersNoch keine Bewertungen
- 2011 33 MaintenanceDokument16 Seiten2011 33 MaintenanceKrishna Khandige100% (1)
- Suez Canal ReportDokument5 SeitenSuez Canal ReportAnonymous Pc6LwfCNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Explaining Zambian Poverty: A History of Economic Policy Since IndependenceDokument37 SeitenExplaining Zambian Poverty: A History of Economic Policy Since IndependenceChola Mukanga100% (3)
- Design and Management of Mettur Dam by Predicting Seepage Losses Using Remote SensingDokument10 SeitenDesign and Management of Mettur Dam by Predicting Seepage Losses Using Remote SensingInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- University of LeedsDokument20 SeitenUniversity of LeedsYasir KhanNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)