Das könnte Ihnen auch gefallen
- Tarea Enclase 2Dokument1 SeiteTarea Enclase 2Jonathan PachecoNoch keine Bewertungen
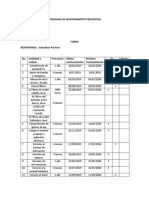
- Programa de Mantenimiento PreventivoDokument3 SeitenPrograma de Mantenimiento PreventivoJonathan PachecoNoch keine Bewertungen
- Informe Metodos NumericosDokument4 SeitenInforme Metodos NumericosJonathan PachecoNoch keine Bewertungen
- AmazonDokument9 SeitenAmazonJonathan Pacheco100% (1)
- Revista de Aplicacion Cientifica y Tecnica V3 N10 1Dokument3 SeitenRevista de Aplicacion Cientifica y Tecnica V3 N10 1Jonathan PachecoNoch keine Bewertungen
- Revista de Aplicacion Cientifica y Tecnica V3 N10 1Dokument10 SeitenRevista de Aplicacion Cientifica y Tecnica V3 N10 1Jonathan PachecoNoch keine Bewertungen
- Definición de AlteridadDokument4 SeitenDefinición de AlteridadJonathan PachecoNoch keine Bewertungen
- Fallas Resultantes de Carga EstáticaDokument11 SeitenFallas Resultantes de Carga EstáticaJonathan PachecoNoch keine Bewertungen
- Ensayo Etica de La AlteridadDokument1 SeiteEnsayo Etica de La AlteridadJonathan PachecoNoch keine Bewertungen
- 2080 In007 - Es PDokument24 Seiten2080 In007 - Es PluisNoch keine Bewertungen
- Dialnet LaFortificacionAbaluartadaDeLaFrontera 4199302Dokument30 SeitenDialnet LaFortificacionAbaluartadaDeLaFrontera 4199302CENTRO DE INVENTARIO DE BIENES CULTURALESNoch keine Bewertungen
- OFERTADokument5 SeitenOFERTAEsteban rivera riveraNoch keine Bewertungen
- Resumen Tarea 4 Unidad3Dokument3 SeitenResumen Tarea 4 Unidad3Saudy MezaNoch keine Bewertungen
- 3WT82526AA000AA2 Datasheet EsDokument4 Seiten3WT82526AA000AA2 Datasheet Eslilian cruz alfaroNoch keine Bewertungen
- La Magia de Los Inciensos y El Significado Según Sus OloresDokument8 SeitenLa Magia de Los Inciensos y El Significado Según Sus OloresYulissa PalenciaNoch keine Bewertungen
- Repo 2 MayoDokument7 SeitenRepo 2 MayoLauraNoch keine Bewertungen
- QFDDokument34 SeitenQFDArmando BozoNoch keine Bewertungen
- Laboratorio 5 - Fisica 4Dokument14 SeitenLaboratorio 5 - Fisica 4Pedro ValverdeNoch keine Bewertungen
- Guía Experiencia 3Dokument4 SeitenGuía Experiencia 3Tefy ManjarresNoch keine Bewertungen
- Fichas de Comprension LectoraDokument17 SeitenFichas de Comprension LectoraVictoriaGladysLopezRpincipeNoch keine Bewertungen
- Cuestionario 1ra. Comunión 2024Dokument4 SeitenCuestionario 1ra. Comunión 2024Dayann GarciaNoch keine Bewertungen
- Acelerador Magnético (Rifle de Gauss) PDFDokument2 SeitenAcelerador Magnético (Rifle de Gauss) PDFChrisXYZ147100% (1)
- No2 2016Dokument1 SeiteNo2 2016Sebastian Ruiz Peralta0% (1)
- Alimentación y Respiración de Las PlantasDokument2 SeitenAlimentación y Respiración de Las PlantasLuis GabrielNoch keine Bewertungen
- 3p TP - Kepler 6Dokument5 Seiten3p TP - Kepler 6Mauricio VillanuevaNoch keine Bewertungen
- Análisis Por Métodos Espectroscópicos y Estudio Del Proceso de Envejecimiento de Aceites Esenciales de Cítricos PDFDokument321 SeitenAnálisis Por Métodos Espectroscópicos y Estudio Del Proceso de Envejecimiento de Aceites Esenciales de Cítricos PDFMario MatuteNoch keine Bewertungen
- Importancia de La RespiraciónDokument2 SeitenImportancia de La RespiraciónSebastian SuazaNoch keine Bewertungen
- Sesion 20 Aprendiz. 7 El Amor Cristiano - 5toDokument4 SeitenSesion 20 Aprendiz. 7 El Amor Cristiano - 5toAdriano CamposNoch keine Bewertungen
- Disociación ElectrolíticaDokument7 SeitenDisociación ElectrolíticaemilyNoch keine Bewertungen
- MonIRQ4. Baterías CSTRDokument2 SeitenMonIRQ4. Baterías CSTRAaron CarvajalNoch keine Bewertungen
- CMT Abb Unigear Zs 2012Dokument96 SeitenCMT Abb Unigear Zs 2012Jhonny Elvis Pariona NarcisoNoch keine Bewertungen
- Teoria Electro Magnetica TerminadoDokument23 SeitenTeoria Electro Magnetica Terminadojorge castilla lopeNoch keine Bewertungen
- Silica GelDokument2 SeitenSilica Geledinm25Noch keine Bewertungen
- El Imperio Inca en Su Momento de Máxima ExpansiónDokument14 SeitenEl Imperio Inca en Su Momento de Máxima Expansiónlina mejiaNoch keine Bewertungen
- BRONAL - Pre EnsambladoDokument20 SeitenBRONAL - Pre EnsambladoMauricio SegarraNoch keine Bewertungen
- Examen Segundo Parcial Ecología y Medio Ambiente 2Dokument4 SeitenExamen Segundo Parcial Ecología y Medio Ambiente 2Laura SerenaNoch keine Bewertungen
- ACTIVIDAD de APRENDIZAJE 7 Derivados de Pez, Cerdo y AbejaDokument5 SeitenACTIVIDAD de APRENDIZAJE 7 Derivados de Pez, Cerdo y AbejaJessLi Pl100% (1)
- Decadencia Moral.Dokument2 SeitenDecadencia Moral.Piero Bruno RagasNoch keine Bewertungen
- Anorexia y Bulimia en Adolescentes, Analisis Desde Una Perspectiva Escolarizada, Tesis de LicenciaturaDokument110 SeitenAnorexia y Bulimia en Adolescentes, Analisis Desde Una Perspectiva Escolarizada, Tesis de LicenciaturaEva Pizarro LoyolaNoch keine Bewertungen