Das könnte Ihnen auch gefallen
- Chapter - 4 - Feedback Control System Characteristics - W2015Dokument54 SeitenChapter - 4 - Feedback Control System Characteristics - W2015120200421003nNoch keine Bewertungen
- Introduction To Robust Control Systems: A System Is Robust When The System Has Acceptable Changes in Performance Due ToDokument7 SeitenIntroduction To Robust Control Systems: A System Is Robust When The System Has Acceptable Changes in Performance Due ToroseNoch keine Bewertungen
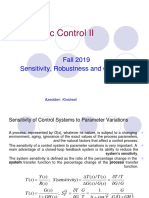
- Automatic Control II - Sensitivity Robustness and OptimalityDokument8 SeitenAutomatic Control II - Sensitivity Robustness and Optimalityعبدالحميد أبوشينةNoch keine Bewertungen
- Chapter-3Dokument10 SeitenChapter-3hailegebreselassie24Noch keine Bewertungen
- H As Se N: Feedback Control System Characteristics and PerformanceDokument11 SeitenH As Se N: Feedback Control System Characteristics and PerformanceYash maullooNoch keine Bewertungen
- Introduction To Robust Control SystemsDokument2 SeitenIntroduction To Robust Control SystemsroseNoch keine Bewertungen
- CS Time Response TDokument26 SeitenCS Time Response TPrasun SinghalNoch keine Bewertungen
- Chapter3_2Dokument12 SeitenChapter3_2hailegebreselassie24Noch keine Bewertungen
- SEO-Optimized Title for byjusexamprep.com Document on Mathematical Modeling and Representation of Systems in Control EngineeringDokument15 SeitenSEO-Optimized Title for byjusexamprep.com Document on Mathematical Modeling and Representation of Systems in Control EngineeringAlok SaraSwatNoch keine Bewertungen
- EEE338A FeedBack CharacteristicsDokument19 SeitenEEE338A FeedBack CharacteristicsKenvyl PhamNoch keine Bewertungen
- Feedback Control Effects on System PerformanceDokument20 SeitenFeedback Control Effects on System PerformanceShubhobrata RudraNoch keine Bewertungen
- Ch3 Feedback Control CharacteristicsDokument27 SeitenCh3 Feedback Control Characteristicsnainesh goteNoch keine Bewertungen
- Week 3Dokument38 SeitenWeek 3Raising StarNoch keine Bewertungen
- Benchmark Systems For PID ControlDokument3 SeitenBenchmark Systems For PID ControlMarlon José Do CarmoNoch keine Bewertungen
- DigitalControlSystems Lecture 1 PDFDokument50 SeitenDigitalControlSystems Lecture 1 PDFShafayet UddinNoch keine Bewertungen
- Modern Control ReportDokument38 SeitenModern Control ReportJaden MoniezNoch keine Bewertungen
- PID-APPLIED CONTROL SYSTEMS: PROPORTIONAL PLUS INTEGRAL PLUS DERIVATIVE CONTROLDokument28 SeitenPID-APPLIED CONTROL SYSTEMS: PROPORTIONAL PLUS INTEGRAL PLUS DERIVATIVE CONTROLhiltoneng100% (1)
- Digital Control SystemDokument11 SeitenDigital Control SystemAkash A KollamparampilNoch keine Bewertungen
- Chapter 3Dokument17 SeitenChapter 3Yonatan GizawNoch keine Bewertungen
- T6 - PID Controller - 2021Dokument36 SeitenT6 - PID Controller - 2021James ChanNoch keine Bewertungen
- Chapter 4 Characteristics of Closed-Loop SystemsDokument25 SeitenChapter 4 Characteristics of Closed-Loop SystemsDio ChanNoch keine Bewertungen
- Automatic Tuning of Pid Controller Using Fuzzy LogicDokument8 SeitenAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiNoch keine Bewertungen
- Signals and Systems Booklet (124 Pages)Dokument124 SeitenSignals and Systems Booklet (124 Pages)koustubha sriNoch keine Bewertungen
- Effect of Feedback on System Sensitivity and BandwidthDokument15 SeitenEffect of Feedback on System Sensitivity and BandwidthSushmita KujurNoch keine Bewertungen
- Stability of Control Systems Important Points: CHC3150 Process Dynamics and ControlDokument10 SeitenStability of Control Systems Important Points: CHC3150 Process Dynamics and ControlOseribho ObohNoch keine Bewertungen
- Lag and Lead CompensatorsDokument21 SeitenLag and Lead CompensatorsHariPriyan100% (7)
- Where Are We ?Dokument18 SeitenWhere Are We ?HenryNielsenNoch keine Bewertungen
- Digital Control: Fundamentals: ENGI 7825: Control Systems II Andrew VardyDokument32 SeitenDigital Control: Fundamentals: ENGI 7825: Control Systems II Andrew VardyZhraa NorNoch keine Bewertungen
- Lec1 PLCDokument11 SeitenLec1 PLCMohammed EhabNoch keine Bewertungen
- An Introduction To Digital Control Systems - Tutorial: ResearchDokument21 SeitenAn Introduction To Digital Control Systems - Tutorial: ResearchNahomNoch keine Bewertungen
- Task2 1 Specific Training-EnDokument35 SeitenTask2 1 Specific Training-EnSantiago LarrazNoch keine Bewertungen
- Lecture 04 Feedback Control System CharacteristicsDokument23 SeitenLecture 04 Feedback Control System Characteristicscesar ruizNoch keine Bewertungen
- Control SystemDokument11 SeitenControl Systembalaji1986Noch keine Bewertungen
- Chapter - 5 - The Performance of Feedback Control Systems - W2015Dokument91 SeitenChapter - 5 - The Performance of Feedback Control Systems - W2015120200421003nNoch keine Bewertungen
- Self Tuning PID Contr Oller Using Ziegler Nichols Method For PR Ogr Ammable Logic Contr Oller SDokument6 SeitenSelf Tuning PID Contr Oller Using Ziegler Nichols Method For PR Ogr Ammable Logic Contr Oller SkalyanNoch keine Bewertungen
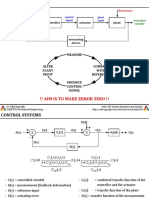
- CONTROL SYSTEMS: MINIMIZING ERRORSDokument11 SeitenCONTROL SYSTEMS: MINIMIZING ERRORScapturemrahNoch keine Bewertungen
- AI Pertemuan 4v2Dokument59 SeitenAI Pertemuan 4v2muhammad iqbal samudraNoch keine Bewertungen
- Objectives: Chapter 4: Feedback Control System CharacteristicsDokument17 SeitenObjectives: Chapter 4: Feedback Control System CharacteristicsNikhil V NainoorNoch keine Bewertungen
- EET302 M2-Ktunotes - inDokument33 SeitenEET302 M2-Ktunotes - inAkhilaNoch keine Bewertungen
- Chapter 4Dokument17 SeitenChapter 4CarlosCD17Noch keine Bewertungen
- Benchmark Systems For PID ControlDokument2 SeitenBenchmark Systems For PID ControlRodrigo SchneiderNoch keine Bewertungen
- Mixed H PID Robust Control Via Genetic Algorithms andDokument6 SeitenMixed H PID Robust Control Via Genetic Algorithms andReza KühnNoch keine Bewertungen
- Feedback Control: Massachusetts Institute of Technology Subject 2.017Dokument12 SeitenFeedback Control: Massachusetts Institute of Technology Subject 2.017Dr. Ir. R. Didin Kusdian, MT.Noch keine Bewertungen
- Feedback Control LectureDokument16 SeitenFeedback Control LecturepierrefreNoch keine Bewertungen
- CONTROL SYSTEMS Nov 18Dokument2 SeitenCONTROL SYSTEMS Nov 18Department of Electronics and Communication Engineering AKNUNoch keine Bewertungen
- Automatic Generation Control For Single Area Power System Using GNA Tuned PID ControllerDokument9 SeitenAutomatic Generation Control For Single Area Power System Using GNA Tuned PID ControllerHamsa DeepikaNoch keine Bewertungen
- chapter1_2Dokument32 Seitenchapter1_2hailegebreselassie24Noch keine Bewertungen
- Feedback Control Tuning in Chemical ProcessesDokument22 SeitenFeedback Control Tuning in Chemical ProcessesTaniadi SuriaNoch keine Bewertungen
- Repetitive ControlDokument22 SeitenRepetitive ControlShri KulkarniNoch keine Bewertungen
- Types of Controllers - Proportional Integral and Derivative Controllers - Electrical4UDokument13 SeitenTypes of Controllers - Proportional Integral and Derivative Controllers - Electrical4UHasan Qayyum ChohanNoch keine Bewertungen
- WINSEM2020-21 EEE3001 ETH VL2020210500342 2021-03-04 Reference-Material-IDokument83 SeitenWINSEM2020-21 EEE3001 ETH VL2020210500342 2021-03-04 Reference-Material-ISAIKAT MUKHERJEE 19BEE0132Noch keine Bewertungen
- Control Systems K-NotesDokument35 SeitenControl Systems K-NotesAkashGaurav100% (1)
- ME 325 ControlSystems Lecture 2 2023 PDFDokument12 SeitenME 325 ControlSystems Lecture 2 2023 PDFNissy ChinthapalliNoch keine Bewertungen
- Experiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionDokument12 SeitenExperiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionNimra NoorNoch keine Bewertungen
- Lecture 02 AV-356 System ModelingDokument28 SeitenLecture 02 AV-356 System ModelingUsama NazirNoch keine Bewertungen
- Comaprision of Time Delay-Paper1Dokument4 SeitenComaprision of Time Delay-Paper1AkshithaNoch keine Bewertungen
- Optimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesDokument6 SeitenOptimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesAnonymous WkbmWCa8MNoch keine Bewertungen
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsVon EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsBewertung: 1 von 5 Sternen1/5 (1)
- Control Design For Set Point Tracking: 5.1 Tracking Constant References Using State FeedbackDokument14 SeitenControl Design For Set Point Tracking: 5.1 Tracking Constant References Using State FeedbackfutNoch keine Bewertungen
- MI PracDokument3 SeitenMI Practejal daveNoch keine Bewertungen
- ScantimeandwatchdogtimerDokument15 SeitenScantimeandwatchdogtimertejal daveNoch keine Bewertungen
- Types of Output Module and Wiring of Filed Devices With Input/outputmoduleDokument13 SeitenTypes of Output Module and Wiring of Filed Devices With Input/outputmoduletejal daveNoch keine Bewertungen
- LeadlagfrequencyresponseDokument11 SeitenLeadlagfrequencyresponsetejal daveNoch keine Bewertungen
- Sourcing SinkingDokument13 SeitenSourcing Sinkingtejal daveNoch keine Bewertungen
- SURVEYING - 1 Short Answers IDokument5 SeitenSURVEYING - 1 Short Answers IHarish MerugumalaNoch keine Bewertungen
- Charts The Chart WizardDokument7 SeitenCharts The Chart WizardFaishal HummamNoch keine Bewertungen
- Advanced Reading - Final TestsDokument9 SeitenAdvanced Reading - Final TeststrandinhgiabaoNoch keine Bewertungen
- Introduction To The Astm E3219 Standard Guide For Derivation of Health Based Exposure Limits (Hbels)Dokument10 SeitenIntroduction To The Astm E3219 Standard Guide For Derivation of Health Based Exposure Limits (Hbels)nsk79inNoch keine Bewertungen
- Dokumen - Tips - Igenetics A Molecular Approach Test Bank 1 Test Bank For Igenetics 30 The CentrosomesDokument27 SeitenDokumen - Tips - Igenetics A Molecular Approach Test Bank 1 Test Bank For Igenetics 30 The CentrosomesSamruddhi KarambelkarNoch keine Bewertungen
- Eucalyptus Pulp Fibres As Alternative ReDokument8 SeitenEucalyptus Pulp Fibres As Alternative ReDiego JavierNoch keine Bewertungen
- Product Data Sheet: Description: TionaDokument1 SeiteProduct Data Sheet: Description: TionaLong An ĐỗNoch keine Bewertungen
- 978 0 7503 5552 0.previewDokument22 Seiten978 0 7503 5552 0.previewAaiesha MohammedNoch keine Bewertungen
- Hydro-Clean Washing System: Haver Chemicals Haver ChemicalsDokument8 SeitenHydro-Clean Washing System: Haver Chemicals Haver ChemicalstjatonlineNoch keine Bewertungen
- Van Houten - 1976 - Late Cenozoic Volcaniclastic Deposits, Andean Foredeep, ColombiaDokument15 SeitenVan Houten - 1976 - Late Cenozoic Volcaniclastic Deposits, Andean Foredeep, ColombiaAstrid SiachoqueNoch keine Bewertungen
- EAPP FINAL Module 1... Grade 12 BezosDokument2 SeitenEAPP FINAL Module 1... Grade 12 Bezosadrian lozano100% (1)
- Biosciences Journals Term ListDokument146 SeitenBiosciences Journals Term Listkunalfcri09Noch keine Bewertungen
- DepEd-Region III Schools Division of Tarlac Province Curriculum Audit Program (CAPDokument20 SeitenDepEd-Region III Schools Division of Tarlac Province Curriculum Audit Program (CAPClaudine Manuel LibunaoNoch keine Bewertungen
- Reasoning Ability: Ibt Institute Pvt. LTDDokument9 SeitenReasoning Ability: Ibt Institute Pvt. LTDHulk 1234Noch keine Bewertungen
- Lecture Guide 2 in Engineering Data Analysis Engr. Theresa Lean Roma Tuliao-SumerDokument17 SeitenLecture Guide 2 in Engineering Data Analysis Engr. Theresa Lean Roma Tuliao-SumerJustin Paul TumaliuanNoch keine Bewertungen
- Social PsychologyDokument6 SeitenSocial PsychologyRaxNoch keine Bewertungen
- Vocabulary TestDokument5 SeitenVocabulary Testmeiluz molina rodriguezNoch keine Bewertungen
- Successful Negotiation Skills Process PDFDokument12 SeitenSuccessful Negotiation Skills Process PDFtpplantNoch keine Bewertungen
- Cualesreginaldray 12881 322722 CE52FB1-Group-7-2 PDFDokument408 SeitenCualesreginaldray 12881 322722 CE52FB1-Group-7-2 PDFMæbēTh CuarterosNoch keine Bewertungen
- Increasing Efficiency of Boiler Using ScaphDokument11 SeitenIncreasing Efficiency of Boiler Using ScaphInternational Journal of Innovative Science and Research Technology100% (1)
- Eccd Result 2022 2023Dokument4 SeitenEccd Result 2022 2023Evanie Enriquez Eporac-CabuyaoNoch keine Bewertungen
- Ground VibrationsDokument11 SeitenGround VibrationsCory WashingtonNoch keine Bewertungen
- 10math RemovedDokument72 Seiten10math RemovedA KennedyNoch keine Bewertungen
- Human PsychologyDokument17 SeitenHuman PsychologyJackNoch keine Bewertungen
- Portfolio For Self Directed Learning For Major Project WorkDokument2 SeitenPortfolio For Self Directed Learning For Major Project WorkJK Gaming -The Perfect GamerNoch keine Bewertungen
- Cainta Catholic College: Academic Year 2021 - 2022Dokument3 SeitenCainta Catholic College: Academic Year 2021 - 2022Angelo lacandiliNoch keine Bewertungen
- CBSE Class 7 Geography Chapter 5 Notes - WaterDokument7 SeitenCBSE Class 7 Geography Chapter 5 Notes - WaterTottleNoch keine Bewertungen
- Research Design Elements and ConsiderationsDokument19 SeitenResearch Design Elements and Considerationsm bilalNoch keine Bewertungen
- Fi2 ReportDokument58 SeitenFi2 Reportfob offNoch keine Bewertungen
- Finding Life in Space: British Scientists Plan New HuntDokument18 SeitenFinding Life in Space: British Scientists Plan New HuntLê Thanh ThảoNoch keine Bewertungen