Das könnte Ihnen auch gefallen
- Comprens OresDokument6 SeitenComprens OresYoel MaronNoch keine Bewertungen
- Mallas WorkDokument4 SeitenMallas WorkYoel MaronNoch keine Bewertungen
- TRTRTRT LuisDokument24 SeitenTRTRTRT LuisYoel MaronNoch keine Bewertungen
- Sostenimiento en Mineria SubterraneaDokument16 SeitenSostenimiento en Mineria SubterraneaYoel MaronNoch keine Bewertungen
- Trabajos de Elementos TransporteDokument8 SeitenTrabajos de Elementos TransporteYoel MaronNoch keine Bewertungen
- Bonbas y DrenajeDokument13 SeitenBonbas y DrenajeYoel MaronNoch keine Bewertungen
- Imforme Nro 2Dokument5 SeitenImforme Nro 2Yoel MaronNoch keine Bewertungen
- Tratamiento de AguasDokument1 SeiteTratamiento de AguasYoel MaronNoch keine Bewertungen
- Tratamiento de AireDokument1 SeiteTratamiento de AireYoel MaronNoch keine Bewertungen
- Monitor EoDokument1 SeiteMonitor EoYoel MaronNoch keine Bewertungen
- Tratamiento de Aguas AcidasDokument1 SeiteTratamiento de Aguas AcidasYoel MaronNoch keine Bewertungen
- Declaración Anual Consolidada D.A.C.: NuevoDokument5 SeitenDeclaración Anual Consolidada D.A.C.: NuevoYoel MaronNoch keine Bewertungen
- Topografía 1Dokument1 SeiteTopografía 1Mily CuevaNoch keine Bewertungen
- EgswesgDokument7 SeitenEgswesgYoel MaronNoch keine Bewertungen
- Casos Proyectos Iimp Julio 2017Dokument3 SeitenCasos Proyectos Iimp Julio 2017Yoel MaronNoch keine Bewertungen
- Declaración Anual ConsolidadaDokument5 SeitenDeclaración Anual ConsolidadaYoel MaronNoch keine Bewertungen
- Libro 1Dokument2 SeitenLibro 1Yoel MaronNoch keine Bewertungen
- Casos Proyectos Iimp Julio 2017Dokument3 SeitenCasos Proyectos Iimp Julio 2017Yoel MaronNoch keine Bewertungen
- Word Modificado A Norma APADokument1 SeiteWord Modificado A Norma APAYoel MaronNoch keine Bewertungen
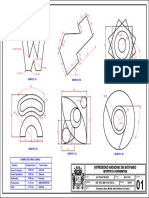
- 01 Laminas CAD - I PDFDokument1 Seite01 Laminas CAD - I PDFYoel MaronNoch keine Bewertungen
- Hipoclorito de CalcioDokument1 SeiteHipoclorito de CalcioYoel MaronNoch keine Bewertungen
- Planeamiento de La ProduccionDokument26 SeitenPlaneamiento de La ProduccionYoel MaronNoch keine Bewertungen
- Logistica y AlmacenajeDokument37 SeitenLogistica y AlmacenajeYoel MaronNoch keine Bewertungen
- La MatrizDokument1 SeiteLa MatrizYoel MaronNoch keine Bewertungen
- Word Modificado A Norma APADokument1 SeiteWord Modificado A Norma APAYoel MaronNoch keine Bewertungen
- La MatrizDokument1 SeiteLa MatrizYoel MaronNoch keine Bewertungen
- Word Modificado A Norma APADokument1 SeiteWord Modificado A Norma APAYoel MaronNoch keine Bewertungen
- Curvas de NivelDokument3 SeitenCurvas de NivelYoel MaronNoch keine Bewertungen
- Recursos NaturalesDokument6 SeitenRecursos NaturalesYoel MaronNoch keine Bewertungen
- Progresiones 6-10 PlaneacionDokument5 SeitenProgresiones 6-10 PlaneacionErik MNoch keine Bewertungen
- Lab Geometría Analítica Feb-Jun 2021Dokument12 SeitenLab Geometría Analítica Feb-Jun 2021Sophie BañosNoch keine Bewertungen
- Suelos ExpansivosDokument36 SeitenSuelos ExpansivosAlex Saul Maquera ChoqueNoch keine Bewertungen
- Anexo 1 Ejercicios Tarea 2Dokument11 SeitenAnexo 1 Ejercicios Tarea 2Diana SantibañezNoch keine Bewertungen
- Electromagnetismo: MateriaDokument71 SeitenElectromagnetismo: MateriaTania RodriguezNoch keine Bewertungen
- Ensayo de PruebaDokument7 SeitenEnsayo de Pruebaeduardo garciaNoch keine Bewertungen
- GasesDokument7 SeitenGasesdiego cadenaNoch keine Bewertungen
- Parcial Semana 6Dokument7 SeitenParcial Semana 6Johan AguirreNoch keine Bewertungen
- Guía de Actividades y Rúbrica de Evaluación - Unidad 2 - Tarea 2 - Dualidad Onda-PartículaDokument10 SeitenGuía de Actividades y Rúbrica de Evaluación - Unidad 2 - Tarea 2 - Dualidad Onda-PartículaBrayanNoch keine Bewertungen
- Aplicaciones Del Campo y Carga Eléctrica en La Vida DiariaDokument16 SeitenAplicaciones Del Campo y Carga Eléctrica en La Vida DiariaDarlin EspinosaNoch keine Bewertungen
- 20 Ejemplos de Magnitudes Vectoriales y EscalaresDokument4 Seiten20 Ejemplos de Magnitudes Vectoriales y EscalaresEmilio Nicolás AssefhNoch keine Bewertungen
- T.P N °1 de Ambiente de Trabajo I-Ruidos-Toledo, CarolinaDokument5 SeitenT.P N °1 de Ambiente de Trabajo I-Ruidos-Toledo, CarolinaCamila ToledoNoch keine Bewertungen
- Losa de FundacionDokument26 SeitenLosa de FundacionACOSTANoch keine Bewertungen
- Practica No 3 Destilación FraccionadaDokument27 SeitenPractica No 3 Destilación FraccionadaRodrigo GonzálezNoch keine Bewertungen
- Ficha Tecnica Producto 41 PDFDokument1 SeiteFicha Tecnica Producto 41 PDFAlbertoNoch keine Bewertungen
- Ecuaciones Del Movimiento Circular Uniforme (M.C.U.)Dokument1 SeiteEcuaciones Del Movimiento Circular Uniforme (M.C.U.)Lester RoqueNoch keine Bewertungen
- Af6e07 PDFDokument10 SeitenAf6e07 PDFnatahurgri3Noch keine Bewertungen
- Probabilidad y Permutaciones - Combinaciones. NICOLAS ESCOBAR YELA 11-2Dokument4 SeitenProbabilidad y Permutaciones - Combinaciones. NICOLAS ESCOBAR YELA 11-2Nicolas Escobar yelaNoch keine Bewertungen
- Hidraulica de Canales Unidad 4 Flujo Gradualmente VariadoDokument30 SeitenHidraulica de Canales Unidad 4 Flujo Gradualmente Variadoluishumbertocabreralopez1234Noch keine Bewertungen
- Examen 2 Teorico ConfDokument14 SeitenExamen 2 Teorico ConfErika ApazaNoch keine Bewertungen
- Memoria de Puente 2Dokument25 SeitenMemoria de Puente 2jose luis guerrero romeroNoch keine Bewertungen
- Lab 4Dokument8 SeitenLab 4Ivonny VasquezNoch keine Bewertungen
- Tabla 2.1 y Tabla 2.2Dokument2 SeitenTabla 2.1 y Tabla 2.2jc2113781Noch keine Bewertungen
- Evaluacion 2-4 5B 2020-2Dokument3 SeitenEvaluacion 2-4 5B 2020-2Juseabh Krosby Sotomayor GarciaNoch keine Bewertungen
- Guía Física 3 MruaDokument2 SeitenGuía Física 3 MruaCarolina ManquenahuelNoch keine Bewertungen
- Cuaderno de Informe 3semanaDokument13 SeitenCuaderno de Informe 3semanaDiego BalbinNoch keine Bewertungen
- Clase 3 CALCULOS 13 08 021Dokument55 SeitenClase 3 CALCULOS 13 08 021Celina AlejandroNoch keine Bewertungen
- Examen 2 Física II Primavera 2022Dokument2 SeitenExamen 2 Física II Primavera 2022JuanmaSalgadoNoch keine Bewertungen
- Teorema de TalesDokument5 SeitenTeorema de Talesjoderodio chileNoch keine Bewertungen