Das könnte Ihnen auch gefallen
- ME 3507: Theory of Machines: Dr. Faraz JunejoDokument45 SeitenME 3507: Theory of Machines: Dr. Faraz JunejoArsal AbbasNoch keine Bewertungen
- Lecture 1 Introduction To DynamicsDokument22 SeitenLecture 1 Introduction To Dynamicsmustafa hassanNoch keine Bewertungen
- Basic Kinematic ConceptsDokument33 SeitenBasic Kinematic ConceptsMark Niño JavierNoch keine Bewertungen
- ME 7 - Activity 2Dokument5 SeitenME 7 - Activity 2Rygen Faye Del RosarioNoch keine Bewertungen
- Dr. Ahmed Ramadan: / Kinematics and Dynamics of MachinesDokument10 SeitenDr. Ahmed Ramadan: / Kinematics and Dynamics of MachinesMouhamed MamdouhNoch keine Bewertungen
- InTech-Robot Kinematics Forward and Inverse KinematicsDokument34 SeitenInTech-Robot Kinematics Forward and Inverse KinematicsMurat ToprakNoch keine Bewertungen
- Tom ImpDokument27 SeitenTom Impcorruptmail760Noch keine Bewertungen
- Robot Mekanik HesaplamalarDokument33 SeitenRobot Mekanik HesaplamalarMurat ToprakNoch keine Bewertungen
- Robot Kinematics: Forward and Inverse Kinematics: December 2006Dokument33 SeitenRobot Kinematics: Forward and Inverse Kinematics: December 2006Murat ToprakNoch keine Bewertungen
- Kom Unit 1 PDFDokument18 SeitenKom Unit 1 PDFDEVENDRA SINGHNoch keine Bewertungen
- WWW - Learnengineering.In: Unit 1 - Basics of Mechanisms Part A QuestionsDokument17 SeitenWWW - Learnengineering.In: Unit 1 - Basics of Mechanisms Part A QuestionsPrasanna SekarNoch keine Bewertungen
- TEC-Machines Printed EditionpdfDokument9 SeitenTEC-Machines Printed EditionpdfFarid HendroNoch keine Bewertungen
- World's Largest Science, Technology & Medicine Open Access Book PublisherDokument34 SeitenWorld's Largest Science, Technology & Medicine Open Access Book PublisherAlperen YılmazNoch keine Bewertungen
- Basic Kinematic ConceptsDokument33 SeitenBasic Kinematic Conceptsinkheartkat100% (1)
- C2-Free Vib SDOFDokument14 SeitenC2-Free Vib SDOFYogen RajNoch keine Bewertungen
- MCT 342 Lecture 2 Spring 2021Dokument90 SeitenMCT 342 Lecture 2 Spring 2021Youssef NagatyNoch keine Bewertungen
- Kinetics of Particles Lecture Note (2nd Newton Law)Dokument40 SeitenKinetics of Particles Lecture Note (2nd Newton Law)Ainni MazlanNoch keine Bewertungen
- Lecture 1Dokument18 SeitenLecture 1Mahendra ChilakalaNoch keine Bewertungen
- Kom Two MarksDokument21 SeitenKom Two MarksNavNoch keine Bewertungen
- Lecture 05 PDFDokument59 SeitenLecture 05 PDF崔大炮Noch keine Bewertungen
- Lecture 2 Mobility of Mechanisms Dr. Othman HassanDokument16 SeitenLecture 2 Mobility of Mechanisms Dr. Othman Hassanmohamed hemdanNoch keine Bewertungen
- Kinematics of Machinery (Me35) - 1 PDFDokument15 SeitenKinematics of Machinery (Me35) - 1 PDFPraveen RajaNoch keine Bewertungen
- University Institute of Engineering Department MechanicalDokument35 SeitenUniversity Institute of Engineering Department MechanicalKhushi bhandariNoch keine Bewertungen
- Lab 4 2023Dokument11 SeitenLab 4 2023Jessica Di TommasoNoch keine Bewertungen
- 1075-4643 - Lecture Notes Chapter 1Dokument9 Seiten1075-4643 - Lecture Notes Chapter 1Mottalab ShaonNoch keine Bewertungen
- 1.4 Mechanisms (Inversions)Dokument30 Seiten1.4 Mechanisms (Inversions)Ajith KumarNoch keine Bewertungen
- NEET Syllabus 2023 PhysicsDokument5 SeitenNEET Syllabus 2023 PhysicsVogolus machatteNoch keine Bewertungen
- Revised Syllabus Comparison With Original Syllabus 2020-21-Class 11Dokument5 SeitenRevised Syllabus Comparison With Original Syllabus 2020-21-Class 11John Kevin 12A22Noch keine Bewertungen
- Manufacturing Engineering II Lecture TwoDokument19 SeitenManufacturing Engineering II Lecture TwoEyu KalebNoch keine Bewertungen
- Theory of Machines: DR - Amer A. AbdelhakeemDokument39 SeitenTheory of Machines: DR - Amer A. AbdelhakeemMOHAMMED FahmyNoch keine Bewertungen
- Kinematics Lecture NotesDokument34 SeitenKinematics Lecture Notesprasad6048100% (1)
- Chapter One1Dokument28 SeitenChapter One1Saleamilak tamiruNoch keine Bewertungen
- Mechanical Actuation SystemDokument34 SeitenMechanical Actuation SystemRaghav VaswaniNoch keine Bewertungen
- LDSD GodseDokument24 SeitenLDSD GodseKiranmai SrinivasuluNoch keine Bewertungen
- Topics: - Motion Along A Straight LineDokument2 SeitenTopics: - Motion Along A Straight LineIrheena LlorinNoch keine Bewertungen
- Kinematics of MachinesDokument46 SeitenKinematics of Machinessanket patel100% (2)
- 1introduction To DynamicsDokument32 Seiten1introduction To DynamicsRheineNoch keine Bewertungen
- Sliding Mode Control of Inverted PenduluDokument3 SeitenSliding Mode Control of Inverted PendulumuzammalNoch keine Bewertungen
- Mechanical Vibration Chapter 1Dokument34 SeitenMechanical Vibration Chapter 1Nahum MykingNoch keine Bewertungen
- The Indian Community School, Kuwait Syllabus Plan For The Year 2017-2018Dokument8 SeitenThe Indian Community School, Kuwait Syllabus Plan For The Year 2017-2018Zainab NaginaNoch keine Bewertungen
- Catia Digital Mock UpDokument31 SeitenCatia Digital Mock UpslitantNoch keine Bewertungen
- Principios Básicos ActuadoresDokument108 SeitenPrincipios Básicos ActuadoresJonathan TerrónNoch keine Bewertungen
- IRM 01 Kinematics Dynamics PDFDokument109 SeitenIRM 01 Kinematics Dynamics PDFSexy macho Bon bonNoch keine Bewertungen
- 0 BooksDokument28 Seiten0 BooksUlfa KingNoch keine Bewertungen
- Mach L 1Dokument34 SeitenMach L 1abdul bariNoch keine Bewertungen
- MEC420 - Kinematics of ParticlesDokument55 SeitenMEC420 - Kinematics of ParticlesWaIe AzfarNoch keine Bewertungen
- Module 1Dokument32 SeitenModule 1abhishek bsNoch keine Bewertungen
- Kom Unit-IDokument52 SeitenKom Unit-IJAYAMADHURI CHNoch keine Bewertungen
- Principles of DynamicsDokument6 SeitenPrinciples of Dynamicsmaria.olivaaa.rossNoch keine Bewertungen
- Dynamic Modeling and Analysis of Inverted Pendulum Using Lagrangian-Differential Transform MethodDokument6 SeitenDynamic Modeling and Analysis of Inverted Pendulum Using Lagrangian-Differential Transform MethodRadwa MagdyNoch keine Bewertungen
- Fchap 5Dokument105 SeitenFchap 5Leta EmiruNoch keine Bewertungen
- Dynamics 1 Course OutlineDokument1 SeiteDynamics 1 Course OutlinePhillip ChirongweNoch keine Bewertungen
- Dynamics of Rigid BodiesDokument13 SeitenDynamics of Rigid Bodiesdecastro.oscareNoch keine Bewertungen
- ME0022 Dynamics: L4, L5 2D Kinematics of A Rigid BodyDokument17 SeitenME0022 Dynamics: L4, L5 2D Kinematics of A Rigid BodyKevin SacaNoch keine Bewertungen
- GDYTFDokument42 SeitenGDYTFHarsha KumarNoch keine Bewertungen
- Dynamic Rotary Inverted PendulumDokument18 SeitenDynamic Rotary Inverted PendulumNguyễn SangNoch keine Bewertungen
- Comparison of Revised Physics Syllabus 2020-21Dokument7 SeitenComparison of Revised Physics Syllabus 2020-21Krish Maheshwari100% (1)
- GSPH101, PHY101 All LecturesDokument93 SeitenGSPH101, PHY101 All LecturesHammam sabrNoch keine Bewertungen
- Chapter7 DEMTOL1Dokument100 SeitenChapter7 DEMTOL1Ad Man GeTigNoch keine Bewertungen
- 3-Dimensioning Tolerancing FitsDokument40 Seiten3-Dimensioning Tolerancing FitsAd Man GeTigNoch keine Bewertungen
- Chapter 01 IntroductionDokument79 SeitenChapter 01 IntroductionAd Man GeTigNoch keine Bewertungen
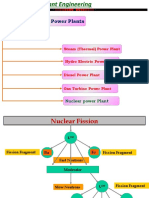
- Classification of Power Plants: Steam (Thermal) Power Plant Hydro Electric Power PlantDokument10 SeitenClassification of Power Plants: Steam (Thermal) Power Plant Hydro Electric Power PlantAd Man GeTigNoch keine Bewertungen
- Classification of Power PlantsDokument53 SeitenClassification of Power PlantsAd Man GeTigNoch keine Bewertungen
- Draft Tube FlowDokument31 SeitenDraft Tube FlowAd Man GeTigNoch keine Bewertungen
- Lukhdhirji Engineering College: Hydraulic TurbinesDokument37 SeitenLukhdhirji Engineering College: Hydraulic TurbinesAd Man GeTigNoch keine Bewertungen
- Hydro Electric Power Plant 568a6d753e8bfDokument35 SeitenHydro Electric Power Plant 568a6d753e8bfAd Man GeTigNoch keine Bewertungen
- Lukhdhirji Engineering College: Hydraulic TurbinesDokument37 SeitenLukhdhirji Engineering College: Hydraulic TurbinesAd Man GeTigNoch keine Bewertungen
- Hydropower (Current)Dokument22 SeitenHydropower (Current)Ad Man GeTigNoch keine Bewertungen
- Hydropower: Electricity From Moving WaterDokument21 SeitenHydropower: Electricity From Moving WaterAd Man GeTigNoch keine Bewertungen
- HYDRO Power Plant Presentation by UsDokument41 SeitenHYDRO Power Plant Presentation by UsAd Man GeTigNoch keine Bewertungen
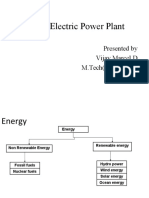
- Hydro Electric Power Plant: Presented by Vijay Marcel D M.Tech (RE) - I YearDokument20 SeitenHydro Electric Power Plant: Presented by Vijay Marcel D M.Tech (RE) - I YearAd Man GeTigNoch keine Bewertungen
- Pelton Wheel and Francis Turbine: Guided by Krunal PatelDokument21 SeitenPelton Wheel and Francis Turbine: Guided by Krunal PatelAd Man GeTigNoch keine Bewertungen
- Hydraulic TurbinesDokument39 SeitenHydraulic TurbinesAd Man GeTigNoch keine Bewertungen
- Hydraulic Turbines: Presented By: Vinod Dahiya Lecturer Mechanical Engg. RGGP NarwanaDokument24 SeitenHydraulic Turbines: Presented By: Vinod Dahiya Lecturer Mechanical Engg. RGGP NarwanaAd Man GeTigNoch keine Bewertungen
- Turbine & Cooling System: Presented by - AVIJEET PRATAP 07ME12 Iet AgraDokument28 SeitenTurbine & Cooling System: Presented by - AVIJEET PRATAP 07ME12 Iet AgraAd Man GeTig100% (1)
- Service Training 824HDokument21 SeitenService Training 824HDiego Alonso Huaraca BalerianoNoch keine Bewertungen
- DG型高压锅炉给水泵说明书 tài liệu kỹ thuật bơm cấpDokument26 SeitenDG型高压锅炉给水泵说明书 tài liệu kỹ thuật bơm cấpMạnh CườngNoch keine Bewertungen
- Troubleshooting - Listen To Your Car PDFDokument4 SeitenTroubleshooting - Listen To Your Car PDFPetrovic MladenNoch keine Bewertungen
- 2013MIMIF Asdfasdf 1104Dokument7 Seiten2013MIMIF Asdfasdf 1104ThetHeinNoch keine Bewertungen
- Group 9 Hydraulics Circuit Design and AnalysisDokument44 SeitenGroup 9 Hydraulics Circuit Design and AnalysisKapil KaviNoch keine Bewertungen
- Strength Under Fire: Cat Fire Pump EnginesDokument4 SeitenStrength Under Fire: Cat Fire Pump EnginesArgenis JimenezNoch keine Bewertungen
- A It 2005 CatalogDokument64 SeitenA It 2005 Catalogcristiannnnnnnnnn100% (6)
- Kia Engine 3 of 3 PDFDokument1 SeiteKia Engine 3 of 3 PDFKevine KhaledNoch keine Bewertungen
- Mechanisms and Multibody Systems MECH3422: MobilityDokument15 SeitenMechanisms and Multibody Systems MECH3422: Mobilityvisio2004Noch keine Bewertungen
- Abb HV MotorsDokument148 SeitenAbb HV MotorsTathagata Dasmajumder100% (1)
- MixerDokument8 SeitenMixerYogesh Badhe100% (1)
- 05' RIO GSL 1.4/1.6: EM FL MT Atdssssteeecchrtbrbd USEDokument6 Seiten05' RIO GSL 1.4/1.6: EM FL MT Atdssssteeecchrtbrbd USEVIRNA UMRO AUDIANANoch keine Bewertungen
- Axial Vibration Input Data List, July 2019Dokument2 SeitenAxial Vibration Input Data List, July 2019Monglen Z. CasiñoNoch keine Bewertungen
- H16 22 00 12EC PDF 4Dokument24 SeitenH16 22 00 12EC PDF 4Ing FermínNoch keine Bewertungen
- Development of Double Gear Fuel Pump For Heat Management ImprovementDokument9 SeitenDevelopment of Double Gear Fuel Pump For Heat Management ImprovementkangsungjinNoch keine Bewertungen
- Condition/Concern: Bulletin No.: PI0631H Date: Apr-2013Dokument5 SeitenCondition/Concern: Bulletin No.: PI0631H Date: Apr-2013Erik CruzNoch keine Bewertungen
- Know Your Cooling SystemDokument103 SeitenKnow Your Cooling SystemgustavoNoch keine Bewertungen
- 380LC9S Performance PDFDokument21 Seiten380LC9S Performance PDFLuis Antonio Vega ParangueoNoch keine Bewertungen
- Esquema Hidráulico CS56Dokument2 SeitenEsquema Hidráulico CS56Anonymous Dq7m7Hq7ar100% (1)
- Abm Motor KatalogDokument16 SeitenAbm Motor Katalogakın ersözNoch keine Bewertungen
- Pec Chapter 4Dokument73 SeitenPec Chapter 4LAWRENCE JIERO BELARMANoch keine Bewertungen
- Serv1855 (345D) - TXTDokument202 SeitenServ1855 (345D) - TXTeng_ebrahim_2000100% (3)
- Gerador Honda EM10000 8kva SpecsDokument1 SeiteGerador Honda EM10000 8kva SpecsM Shoaib AnwarNoch keine Bewertungen
- Diesel Generator Technical SpecificationDokument3 SeitenDiesel Generator Technical SpecificationAkibNoch keine Bewertungen
- Transport Air Conditioning: With BT324 Carrier Sutrak Digital Display (CSDD) or 280P/282P Electronic ThermostatDokument63 SeitenTransport Air Conditioning: With BT324 Carrier Sutrak Digital Display (CSDD) or 280P/282P Electronic Thermostatdario castro100% (1)
- S T A G 2 - W: Petrol - Gas Switch (Injection)Dokument1 SeiteS T A G 2 - W: Petrol - Gas Switch (Injection)Andrew ShaforostovNoch keine Bewertungen
- Yamaha - VEGA R2004Dokument55 SeitenYamaha - VEGA R2004iwan88% (17)
- On Thresher Machine PDFDokument18 SeitenOn Thresher Machine PDFmd sajidNoch keine Bewertungen
- Iveco Stralis As TronicDokument59 SeitenIveco Stralis As Tronicarturvolkovskis100% (9)
- Odabir Motorne Zaštite - Allen Bradley - Za Motore - Za - TransformatoreDokument500 SeitenOdabir Motorne Zaštite - Allen Bradley - Za Motore - Za - TransformatoreKristian MevželjNoch keine Bewertungen