Das könnte Ihnen auch gefallen
- Motors: Why Starters Are Not Used For Land Based Installations?Dokument12 SeitenMotors: Why Starters Are Not Used For Land Based Installations?avm4343100% (1)
- PL-SQL FunctionsDokument130 SeitenPL-SQL Functionswasim ahmed100% (1)
- Chapter 1 Pneumatic SystemDokument95 SeitenChapter 1 Pneumatic SystemNazer Mangirapin BarisNoch keine Bewertungen
- Oracle Alerts: Mona Lisa SahuDokument35 SeitenOracle Alerts: Mona Lisa Sahuanishokm2992Noch keine Bewertungen
- What Is A ThermocoupleDokument13 SeitenWhat Is A ThermocoupleMuhammad Wasiq TanveerNoch keine Bewertungen
- Prediction TheoryDokument90 SeitenPrediction TheoryJuliusSerdeñaTrapalNoch keine Bewertungen
- Auma - PB Modular Range enDokument84 SeitenAuma - PB Modular Range enbenyakiNoch keine Bewertungen
- Day 2 - S3 S4 - Introduction To Jbase Database1Dokument48 SeitenDay 2 - S3 S4 - Introduction To Jbase Database1alasad parvezNoch keine Bewertungen
- Pressure Control TrainerDokument44 SeitenPressure Control TrainerAjeet KumarNoch keine Bewertungen
- Power Control Unit, Hydraulic - SizingDokument4 SeitenPower Control Unit, Hydraulic - SizingdodoNiyo100% (1)
- Safety Requirement in Marine EngineeringDokument24 SeitenSafety Requirement in Marine EngineeringR.W. SaputraNoch keine Bewertungen
- Microcontroller Implementation of Single Phase Inverter Switching StrategiesDokument4 SeitenMicrocontroller Implementation of Single Phase Inverter Switching StrategiesNz225Noch keine Bewertungen
- Infrared Optical PyrometerDokument6 SeitenInfrared Optical PyrometerinstrutechNoch keine Bewertungen
- CP SP 1372e 03 PDFDokument40 SeitenCP SP 1372e 03 PDFArribas Quilaton LeoNoch keine Bewertungen
- Pneumatic ControllersDokument9 SeitenPneumatic Controllerspavan_1988Noch keine Bewertungen
- DanfossMBS3100 3150Dokument6 SeitenDanfossMBS3100 3150Jerine BabuNoch keine Bewertungen
- Tech Tips For Thermostatic Expansion ValvesDokument9 SeitenTech Tips For Thermostatic Expansion ValvesAnonymous UhM8o52cNoch keine Bewertungen
- Strike RiskDokument4 SeitenStrike RiskAdilson Leite ProençaNoch keine Bewertungen
- Megastream Control Valves: General InstructionsDokument4 SeitenMegastream Control Valves: General InstructionsCarlos Alberto Dum GomezNoch keine Bewertungen
- 12 Air Starting of Diesel EnginesDokument26 Seiten12 Air Starting of Diesel EnginesCurtler PaquibotNoch keine Bewertungen
- A Guide For Visatron Oil Mist Detector Users - V 1.2.3 PDFDokument64 SeitenA Guide For Visatron Oil Mist Detector Users - V 1.2.3 PDFGENNIEL SABA100% (4)
- P-42 - Tank Monitoring SystemDokument118 SeitenP-42 - Tank Monitoring SystemCengiz İyiceNoch keine Bewertungen
- 10th Class-Maths Text Book-NewDokument400 Seiten10th Class-Maths Text Book-NewVishnu Muddasani100% (1)
- Monitoring System and Protective Devices Sergejs BoikoDokument12 SeitenMonitoring System and Protective Devices Sergejs BoikoСергей БойкоNoch keine Bewertungen
- Interview Q SASDokument43 SeitenInterview Q SAShimaNoch keine Bewertungen
- Function 5 OralsDokument4 SeitenFunction 5 OralsAditya Arya0% (1)
- 8 Common Problems Found in ShipDokument3 Seiten8 Common Problems Found in ShipAnoop VijayakumarNoch keine Bewertungen
- AVID EaziCal Electro-Pneumatic PositionerDokument4 SeitenAVID EaziCal Electro-Pneumatic PositionerisctomaslopezNoch keine Bewertungen
- 5 Protective DevicesDokument44 Seiten5 Protective DevicesAdrian CamasosaNoch keine Bewertungen
- Spiking Into Aqueous Samples: Standard Guide ForDokument6 SeitenSpiking Into Aqueous Samples: Standard Guide Formohdhafizmdali100% (1)
- Air Compressor On A ShipDokument2 SeitenAir Compressor On A ShipBhalchandra ChandakkarNoch keine Bewertungen
- Tankscope: Operation of EquipmentDokument8 SeitenTankscope: Operation of EquipmentNIKHIL JASWALNoch keine Bewertungen
- Oral Ques AnsDokument182 SeitenOral Ques AnsDheeranNoch keine Bewertungen
- Chapter 9 ChangDokument37 SeitenChapter 9 Changsatya sagarNoch keine Bewertungen
- Datasheet GEF GPD Temp Control Valve 1111 Rev3Dokument19 SeitenDatasheet GEF GPD Temp Control Valve 1111 Rev3bmx_6306223Noch keine Bewertungen
- IHP Pneumatic SymbolsDokument4 SeitenIHP Pneumatic SymbolsBIPIN SHARMANoch keine Bewertungen
- DC Motor ControllerDokument7 SeitenDC Motor ControllerJan MicahNoch keine Bewertungen
- Operating Instruction For Synchronous GeneratorDokument16 SeitenOperating Instruction For Synchronous GeneratoriuliiulianNoch keine Bewertungen
- Type Irxm: Circulating Current RelayDokument7 SeitenType Irxm: Circulating Current RelayThejaswini ArNoch keine Bewertungen
- HM15002EDokument11 SeitenHM15002EYoni EhmNoch keine Bewertungen
- Mogas Msds 2014-2Dokument39 SeitenMogas Msds 2014-2KalkiHereNoch keine Bewertungen
- Connecting Rod B.E. BoltsDokument16 SeitenConnecting Rod B.E. BoltsAnjaana PrashantNoch keine Bewertungen
- Carbon Pile Voltage Regulator Use in A Heavy Duty Generators SystemDokument1 SeiteCarbon Pile Voltage Regulator Use in A Heavy Duty Generators SystemBookMaggotNoch keine Bewertungen
- cONTACTOR MITSUBISHI PDFDokument89 SeitencONTACTOR MITSUBISHI PDFhaerulamriNoch keine Bewertungen
- DP Level Transmitter Dry Leg & Wet OverviewDokument4 SeitenDP Level Transmitter Dry Leg & Wet Overviewshivam kumarNoch keine Bewertungen
- Abb 2600TDokument80 SeitenAbb 2600TAbdullah MuhammadNoch keine Bewertungen
- DCB31 Eng.Dokument15 SeitenDCB31 Eng.Aimad ChamsaouiNoch keine Bewertungen
- Lab2 Nozzle FlowDokument5 SeitenLab2 Nozzle FlowpuhumightNoch keine Bewertungen
- Troubleshooting Induction MotorsDokument14 SeitenTroubleshooting Induction MotorsImelda LadrilloNoch keine Bewertungen
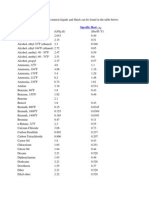
- HFO Specific HeatDokument3 SeitenHFO Specific HeatMohammed Shafi AhmedNoch keine Bewertungen
- Final ExamDokument5 SeitenFinal Examirtiza200Noch keine Bewertungen
- Application Form KOTCDokument3 SeitenApplication Form KOTCgmatweak100% (3)
- Diode Failure Scenarios - Brushless ExciterDokument2 SeitenDiode Failure Scenarios - Brushless ExciterTiagoFaleirosNoch keine Bewertungen
- Fisher Volume BoosterDokument16 SeitenFisher Volume Boosterpawank_kswnNoch keine Bewertungen
- LEC1Dokument17 SeitenLEC1christophermrequintoNoch keine Bewertungen
- A.C.Synchronous Transmitter Manual PDFDokument15 SeitenA.C.Synchronous Transmitter Manual PDFAbhishek RajNoch keine Bewertungen
- Calibration Procedure - ShipCEMSDokument2 SeitenCalibration Procedure - ShipCEMSg arvNoch keine Bewertungen
- Ho RTF Rev 3 2016Dokument259 SeitenHo RTF Rev 3 2016MarkNoch keine Bewertungen
- Oros PistonDokument6 SeitenOros Pistonbrigolmustihotmail.com100% (1)
- Brief Overview Generator Free Ebook Part1 FinalDokument44 SeitenBrief Overview Generator Free Ebook Part1 FinalSushant SinghNoch keine Bewertungen
- DesignRules For HighDampingDokument8 SeitenDesignRules For HighDampingRajesh MalikNoch keine Bewertungen
- AIR COMPRESSOR (M3EH) For SCBADokument37 SeitenAIR COMPRESSOR (M3EH) For SCBAcharles100% (2)
- Lecture #1 (Measurement Systems)Dokument56 SeitenLecture #1 (Measurement Systems)inabalqisNoch keine Bewertungen
- Measuring Temperature at A Cylinder Head Under Thermal LoadDokument5 SeitenMeasuring Temperature at A Cylinder Head Under Thermal Loadddi11Noch keine Bewertungen
- Spool Type Solenoid ValveDokument28 SeitenSpool Type Solenoid ValveSiva Pratap VNoch keine Bewertungen
- Bourdon Tube Pressure GaugeDokument3 SeitenBourdon Tube Pressure GaugeSanam Puri100% (1)
- Mod 5 Engine TestingDokument73 SeitenMod 5 Engine TestingRushikesh PatilNoch keine Bewertungen
- Line & Busbar - Prot - CpriDokument22 SeitenLine & Busbar - Prot - CpriSuresh Kota100% (1)
- Kontrol PneumatikDokument18 SeitenKontrol PneumatikM SONY JAYA WISUDANoch keine Bewertungen
- On-Off Control System Characteristic: Oleh: Rizqiya W. Saputra, M.TDokument10 SeitenOn-Off Control System Characteristic: Oleh: Rizqiya W. Saputra, M.TR.W. SaputraNoch keine Bewertungen
- Lecture VII - Implementation PID Controller in Ship's Auto Pilot (Contoh Kasus)Dokument20 SeitenLecture VII - Implementation PID Controller in Ship's Auto Pilot (Contoh Kasus)R.W. SaputraNoch keine Bewertungen
- On Off Controller 9Dokument2 SeitenOn Off Controller 9Martin TorizNoch keine Bewertungen
- Lecture II - Principles of PID ControllersDokument16 SeitenLecture II - Principles of PID ControllersR.W. SaputraNoch keine Bewertungen
- Lecture I - Introduction To PID Control SystemDokument47 SeitenLecture I - Introduction To PID Control SystemR.W. SaputraNoch keine Bewertungen
- Presentation - Smart Boarding School FrameworkDokument12 SeitenPresentation - Smart Boarding School FrameworkR.W. SaputraNoch keine Bewertungen
- Introduction To Maintenance and RepairingDokument32 SeitenIntroduction To Maintenance and RepairingR.W. SaputraNoch keine Bewertungen
- Invers Transf LaplaceDokument13 SeitenInvers Transf LaplaceMeriska AhmadNoch keine Bewertungen
- 10K Ductile Cast Iron Gate Valve (Flange Type) TOYO VALVE Gate ValvesDokument4 Seiten10K Ductile Cast Iron Gate Valve (Flange Type) TOYO VALVE Gate ValvesFredie LabradorNoch keine Bewertungen
- Manual ECP2010 - ECP2010H en 04Dokument68 SeitenManual ECP2010 - ECP2010H en 04Brandon GonzalezNoch keine Bewertungen
- Angle Chase As PDFDokument7 SeitenAngle Chase As PDFNM HCDENoch keine Bewertungen
- Conveyor Chain and SprocketsDokument5 SeitenConveyor Chain and Sprocketsmartc35Noch keine Bewertungen
- Nice Neotech - Opera Plus Warmer 5000 - 6Dokument1 SeiteNice Neotech - Opera Plus Warmer 5000 - 6David Gnana DuraiNoch keine Bewertungen
- Actor-Network Theory and After - Jonh Law and John HassardDokument14 SeitenActor-Network Theory and After - Jonh Law and John HassardGabriel RomanNoch keine Bewertungen
- Bomberman 93Dokument8 SeitenBomberman 93Mike RussoNoch keine Bewertungen
- Solutions and Solubility 2021Dokument3 SeitenSolutions and Solubility 2021Mauro De LollisNoch keine Bewertungen
- Datasheet ECM 5158 Interface 4pgv1 A80401 PressDokument4 SeitenDatasheet ECM 5158 Interface 4pgv1 A80401 Presslgreilly4Noch keine Bewertungen
- Application SMS MD720-3 DOKU V2 1 enDokument52 SeitenApplication SMS MD720-3 DOKU V2 1 enerendira77Noch keine Bewertungen
- Weather ForecastsDokument5 SeitenWeather ForecastsGianina MihăicăNoch keine Bewertungen
- Nps 5638Dokument8 SeitenNps 5638vamsi_1990Noch keine Bewertungen
- ECG553 Week 10-11 Deep Foundation PileDokument132 SeitenECG553 Week 10-11 Deep Foundation PileNUR FATIN SYAHIRAH MOHD AZLINoch keine Bewertungen
- Leica Disto d410 Manual EngDokument24 SeitenLeica Disto d410 Manual EngcsudhaNoch keine Bewertungen
- DC and AC Machines Lab ManualDokument68 SeitenDC and AC Machines Lab ManualGhilman HabibNoch keine Bewertungen
- 3107 Enthusiast Score Advanced Paper-2 (E+H) JADokument56 Seiten3107 Enthusiast Score Advanced Paper-2 (E+H) JAsonu goyalNoch keine Bewertungen
- OneTen-Frontend Web Development FundamentalsDokument5 SeitenOneTen-Frontend Web Development FundamentalsOkpetah Chioma christabelNoch keine Bewertungen
- Lecture Slides: Shigley's Mechanical Engineering DesignDokument95 SeitenLecture Slides: Shigley's Mechanical Engineering DesignpurnaNoch keine Bewertungen
- 03 - Random Effect ModelDokument10 Seiten03 - Random Effect ModelAdji Pelangi SaputriNoch keine Bewertungen
- Is The Financial Performance of Insurance Companies Listed in Idx Able To Make Profitability After The Existence of BPJS?Dokument10 SeitenIs The Financial Performance of Insurance Companies Listed in Idx Able To Make Profitability After The Existence of BPJS?Bunga LophitaNoch keine Bewertungen
- Zanussi Zou 342 User ManualDokument12 SeitenZanussi Zou 342 User Manualadatok2Noch keine Bewertungen