Das könnte Ihnen auch gefallen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Department of Electrical Engineering Digital Signal ProcessingDokument5 SeitenDepartment of Electrical Engineering Digital Signal ProcessingISHWARI PRASHADNoch keine Bewertungen
- hw3 19fDokument2 Seitenhw3 19fAmreshAmanNoch keine Bewertungen
- AdvDSP Lecture1Dokument43 SeitenAdvDSP Lecture1Alireza DabiryNoch keine Bewertungen
- Discrete Fourier TransformDokument47 SeitenDiscrete Fourier TransformJohn cenaNoch keine Bewertungen
- ELEC 442: Introduction To Digital Signal Processing: Z Z Z Z Z HDokument9 SeitenELEC 442: Introduction To Digital Signal Processing: Z Z Z Z Z HPindi Prince PindiNoch keine Bewertungen
- Winsem2019-20 Ece1004 Eth Vl2019205006022 Cat-2 QP Key Cat 2 Ece1004 - Final Copy - Detailed SolutionDokument4 SeitenWinsem2019-20 Ece1004 Eth Vl2019205006022 Cat-2 QP Key Cat 2 Ece1004 - Final Copy - Detailed Solutionjeevan saiNoch keine Bewertungen
- Lecture 6 - Spectrum Estimation PDFDokument47 SeitenLecture 6 - Spectrum Estimation PDFMahy Magdy0% (1)
- Fourier TransformDokument77 SeitenFourier Transformtextile.km98Noch keine Bewertungen
- CSE - 610 Lecture # 4Dokument32 SeitenCSE - 610 Lecture # 4zaidNoch keine Bewertungen
- Concept of Fourier Analysis:: K N W JWNDokument31 SeitenConcept of Fourier Analysis:: K N W JWNSagata BanerjeeNoch keine Bewertungen
- N X N y N y N Y: Characterization of Digital SystemDokument15 SeitenN X N y N y N Y: Characterization of Digital Systemmomolololilo4100% (1)
- t δ (t−1) dt x (t) =δ (at+b) a b x n δ n x (t) = δ (t−kT) x n u n x n n u n x (t) =cosω tDokument2 Seitent δ (t−1) dt x (t) =δ (at+b) a b x n δ n x (t) = δ (t−kT) x n u n x n n u n x (t) =cosω tManmohan SinghNoch keine Bewertungen
- Lecture 06-07Dokument15 SeitenLecture 06-07Muhammad HusnainNoch keine Bewertungen
- EE-411: Digital Signal Processing - : Problem 1Dokument2 SeitenEE-411: Digital Signal Processing - : Problem 1Qasim FarooqNoch keine Bewertungen
- CTFT DTFT BonusDokument9 SeitenCTFT DTFT BonusAmreshAmanNoch keine Bewertungen
- Fourier Analysis of Discrete Time SignalsDokument11 SeitenFourier Analysis of Discrete Time SignalsprathikNoch keine Bewertungen
- Fourier Analysis of Discrete Time SignalsDokument18 SeitenFourier Analysis of Discrete Time SignalsMVRajeshMaliyeckalNoch keine Bewertungen
- Final - Exam - SIGNALS AND SYSTEMSDokument3 SeitenFinal - Exam - SIGNALS AND SYSTEMSinesNoch keine Bewertungen
- ECE1004 - Signals and Systems: Facilitator: Dr.T.VigneswaranDokument19 SeitenECE1004 - Signals and Systems: Facilitator: Dr.T.VigneswaranSruthi GNoch keine Bewertungen
- DT Fourier Transform (Exercises)Dokument1 SeiteDT Fourier Transform (Exercises)Emmanuel CorreaNoch keine Bewertungen
- DSP Lecture 10Dokument5 SeitenDSP Lecture 10Puneet TyagiNoch keine Bewertungen
- DSP-Chapter7 Student 09082015Dokument41 SeitenDSP-Chapter7 Student 09082015Ngọc Minh LêNoch keine Bewertungen
- Advanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Dokument3 SeitenAdvanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Anonymous tjckgoWNeNoch keine Bewertungen
- Examination Paper For TTT4120 Digital Signal ProcessingDokument9 SeitenExamination Paper For TTT4120 Digital Signal ProcessingSr SeNoch keine Bewertungen
- ECE438 - Laboratory 6: Discrete Fourier Transform and Fast Fourier Transform Algorithms (Week 1)Dokument8 SeitenECE438 - Laboratory 6: Discrete Fourier Transform and Fast Fourier Transform Algorithms (Week 1)James JoneNoch keine Bewertungen
- ECE438 - Laboratory 6: Discrete Fourier Transform and Fast Fourier Transform Algorithms (Week 1)Dokument8 SeitenECE438 - Laboratory 6: Discrete Fourier Transform and Fast Fourier Transform Algorithms (Week 1)Filmann SimpaoNoch keine Bewertungen
- Ss Model 2 2016 - SchemeDokument2 SeitenSs Model 2 2016 - SchemeKaustubha ShahNoch keine Bewertungen
- Lab 1: DTFT, DFT, and DFT Spectral Analysis: (LABE 410) Dr. Jad Abou ChaayaDokument4 SeitenLab 1: DTFT, DFT, and DFT Spectral Analysis: (LABE 410) Dr. Jad Abou ChaayaJane MoujaessNoch keine Bewertungen
- Multirate Signal ProcessingDokument39 SeitenMultirate Signal ProcessingTô Minh ĐạtNoch keine Bewertungen
- Unit 13 - Week-11 Examples On DTFT and DFT: Assignment-11Dokument4 SeitenUnit 13 - Week-11 Examples On DTFT and DFT: Assignment-11jithin danielNoch keine Bewertungen
- 6.003: Signals and Systems-Fall 2002Dokument10 Seiten6.003: Signals and Systems-Fall 2002samsritiNoch keine Bewertungen
- Proc 1 2022 55 64 - 20220204154542Dokument10 SeitenProc 1 2022 55 64 - 20220204154542Majeed AliNoch keine Bewertungen
- Fourier Transform of Discrete Time Signals: Spring 2014Dokument5 SeitenFourier Transform of Discrete Time Signals: Spring 2014Abdul RehmanNoch keine Bewertungen
- Discrete-Time Fourier TransformDokument51 SeitenDiscrete-Time Fourier Transform洪崇恩Noch keine Bewertungen
- Signal System AssignmentDokument5 SeitenSignal System Assignment21ELB370MOHAMMAD AREEB HASAN KHANNoch keine Bewertungen
- Signals and SystemsDokument3 SeitenSignals and SystemsSushant R NaikNoch keine Bewertungen
- DSP-Lec 07-Frequency Analysis of Signals and SystemsDokument40 SeitenDSP-Lec 07-Frequency Analysis of Signals and SystemsthienminhNoch keine Bewertungen
- EE501 Adaptive Filter Design: Instructor: Dr. Farhan KhalidDokument26 SeitenEE501 Adaptive Filter Design: Instructor: Dr. Farhan KhalidSana SaadNoch keine Bewertungen
- Question Bank Signal System Mod 3 by DeepakDokument12 SeitenQuestion Bank Signal System Mod 3 by DeepakSaroj PatnaikNoch keine Bewertungen
- Signals and SystemsDokument22 SeitenSignals and SystemsAnbazhagan SelvanathanNoch keine Bewertungen
- Digital Signal Processing Midterm 2Dokument12 SeitenDigital Signal Processing Midterm 2Saied Aly SalamahNoch keine Bewertungen
- DSP Mid and End Question PaperDokument6 SeitenDSP Mid and End Question PaperMohamed ZaheenNoch keine Bewertungen
- DXGGDokument5 SeitenDXGGAshok KumarNoch keine Bewertungen
- PCA MynotesDokument24 SeitenPCA MynotesjfdweijNoch keine Bewertungen
- Lecture 6 - Fourier Series 0Dokument18 SeitenLecture 6 - Fourier Series 0Roshan kumar sahuNoch keine Bewertungen
- ELEC221 HW04 Winter2023-1Dokument16 SeitenELEC221 HW04 Winter2023-1Isha ShuklaNoch keine Bewertungen
- Assignment 5: IC260 - IIT MandiDokument3 SeitenAssignment 5: IC260 - IIT MandiSourav SamantNoch keine Bewertungen
- Vector Stochastic Differential Equations Used To Electrical Networks With Random ParametersDokument8 SeitenVector Stochastic Differential Equations Used To Electrical Networks With Random ParametersqwertyNoch keine Bewertungen
- Lab 2: Sampling, Convolution, LTI Systems, and Difference EquationsDokument5 SeitenLab 2: Sampling, Convolution, LTI Systems, and Difference EquationsJane MoujaessNoch keine Bewertungen
- EE 301 Notes - Chapter 3 - Part 1Dokument17 SeitenEE 301 Notes - Chapter 3 - Part 1farouq_razzaz2574Noch keine Bewertungen
- Term End Exam 2015: ηK = η, where η = diag (1,Dokument2 SeitenTerm End Exam 2015: ηK = η, where η = diag (1,ianuliNoch keine Bewertungen
- Digital Assignment 3Dokument5 SeitenDigital Assignment 3PallaviNoch keine Bewertungen
- Aau/Aait Center of Biomedical Engineering Digital Signal ProcessingDokument51 SeitenAau/Aait Center of Biomedical Engineering Digital Signal ProcessingSurafel TadesseNoch keine Bewertungen
- Fallsem2019-20 Ece1004 Eth VL2019201000770 Cat-2 QP Key Cat 2 SSDokument4 SeitenFallsem2019-20 Ece1004 Eth VL2019201000770 Cat-2 QP Key Cat 2 SSPina NasaNoch keine Bewertungen
- EEE 2519 CAT I Nov 2020Dokument2 SeitenEEE 2519 CAT I Nov 2020Margaret IrunguNoch keine Bewertungen
- Digital Signal Processing Lecture Notes 2 PageDokument5 SeitenDigital Signal Processing Lecture Notes 2 PageLungelo MkhwanaziNoch keine Bewertungen
- Assignment 2-1Dokument3 SeitenAssignment 2-1opus2012Noch keine Bewertungen
- Digital Signal Processing: Solved HW For Day 11Dokument23 SeitenDigital Signal Processing: Solved HW For Day 11Cuau SuarezNoch keine Bewertungen
- Limit Theorem For The Hit Time of Mappings of A Circle With BreakDokument7 SeitenLimit Theorem For The Hit Time of Mappings of A Circle With BreakResearch ParkNoch keine Bewertungen
- Muzakarah Jawatankuasa Fatwa Majlis Kebangsaan Bagi Hal Ehwal Ugama Islam Malaysia Kali KeDokument7 SeitenMuzakarah Jawatankuasa Fatwa Majlis Kebangsaan Bagi Hal Ehwal Ugama Islam Malaysia Kali KeSiti Zubaidah ZulkhairieNoch keine Bewertungen
- Unit 9:: What Did You See at The Zoo?Dokument11 SeitenUnit 9:: What Did You See at The Zoo?ARiFin MoHaMedNoch keine Bewertungen
- Wulandari - Solihin (2016)Dokument8 SeitenWulandari - Solihin (2016)kelvinprd9Noch keine Bewertungen
- CA IPCC Accounting Guideline Answers May 2015Dokument24 SeitenCA IPCC Accounting Guideline Answers May 2015Prashant PandeyNoch keine Bewertungen
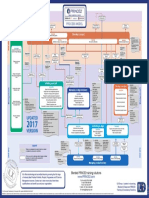
- p2 Process Model 2017Dokument1 Seitep2 Process Model 2017Miguel Fernandes0% (1)
- CO - Config Sap Top JobsDokument81 SeitenCO - Config Sap Top JobsAditya PakalaNoch keine Bewertungen
- SATB All Glory Laud and HonorDokument1 SeiteSATB All Glory Laud and HonorGeorge Orillo BaclayNoch keine Bewertungen
- MacbethDokument2 SeitenMacbethjtwyfordNoch keine Bewertungen
- Dnyanadeep's IAS: UPSC Essay Series - 7Dokument2 SeitenDnyanadeep's IAS: UPSC Essay Series - 7Rahul SinghNoch keine Bewertungen
- Physical Education: Learning Activity SheetDokument13 SeitenPhysical Education: Learning Activity SheetRhea Jane B. CatalanNoch keine Bewertungen
- Marketing Plan For Optimo InternationalDokument47 SeitenMarketing Plan For Optimo InternationalNiña Alfonso100% (1)
- 10 Applications in Engineering Mechanics PDFDokument10 Seiten10 Applications in Engineering Mechanics PDFWolf Lord100% (1)
- Στέργος Νεκτάριος-Μικκιος-CVDokument4 SeitenΣτέργος Νεκτάριος-Μικκιος-CVNektarios MikkiosNoch keine Bewertungen
- Thompson VarelaDokument18 SeitenThompson VarelaGiannis NinosNoch keine Bewertungen
- New Memories by Ansdrela - EnglishDokument47 SeitenNew Memories by Ansdrela - EnglishB bNoch keine Bewertungen
- Maintenance ManagerDokument4 SeitenMaintenance Managerapi-121382389Noch keine Bewertungen
- Beed 3a-Group 2 ResearchDokument65 SeitenBeed 3a-Group 2 ResearchRose GilaNoch keine Bewertungen
- YCAP 7 Steps PosterDokument1 SeiteYCAP 7 Steps PosterSohila AmrNoch keine Bewertungen
- Impact of Diabetic Ketoacidosis Management in The Medical Intensive Care Unit After Order Set ImplementationDokument6 SeitenImpact of Diabetic Ketoacidosis Management in The Medical Intensive Care Unit After Order Set ImplementationFrancisco Sampedro0% (1)
- "Management of Change ": A PR Recommendation ForDokument60 Seiten"Management of Change ": A PR Recommendation ForNitin MehtaNoch keine Bewertungen
- SMF Update Barang 05 Desember 2022Dokument58 SeitenSMF Update Barang 05 Desember 2022Apotek Ibnu RusydNoch keine Bewertungen
- Making Effective Pres. Academic Lit I. Weeks 4 5Dokument27 SeitenMaking Effective Pres. Academic Lit I. Weeks 4 5irfanaNoch keine Bewertungen
- Chapter 1Dokument13 SeitenChapter 1Jerard AnciroNoch keine Bewertungen
- N Advocates Act 1961 Ankita218074 Nujsedu 20221008 230429 1 107Dokument107 SeitenN Advocates Act 1961 Ankita218074 Nujsedu 20221008 230429 1 107ANKITA BISWASNoch keine Bewertungen
- Maria Da Piedade Ferreira - Embodied Emotions - Observations and Experiments in Architecture and Corporeality - Chapter 11Dokument21 SeitenMaria Da Piedade Ferreira - Embodied Emotions - Observations and Experiments in Architecture and Corporeality - Chapter 11Maria Da Piedade FerreiraNoch keine Bewertungen
- Democracy in SomalilandDokument118 SeitenDemocracy in SomalilandAbdirahman IsmailNoch keine Bewertungen
- Elitmus PapersDokument21 SeitenElitmus Papersanon_879320987Noch keine Bewertungen
- Script - Macbeth A La MafiosiDokument27 SeitenScript - Macbeth A La MafiosiMohd Afiq Mat RazaiNoch keine Bewertungen
- General Mathematics - Module #3Dokument7 SeitenGeneral Mathematics - Module #3Archie Artemis NoblezaNoch keine Bewertungen
- Isc Class 11 Maths Sample Paper Model 1Dokument2 SeitenIsc Class 11 Maths Sample Paper Model 1Gaurav ShuklaNoch keine Bewertungen