Das könnte Ihnen auch gefallen
- Cat Sos 793&793b TrucksDokument7 SeitenCat Sos 793&793b TrucksmkNoch keine Bewertungen
- 061709-Introduction To MotorsDokument27 Seiten061709-Introduction To MotorsmohanmzcetNoch keine Bewertungen
- DC Motors: Types, Design and ApplicationsDokument45 SeitenDC Motors: Types, Design and Applicationstristan jeff bautistaNoch keine Bewertungen
- Chapter 4Dokument37 SeitenChapter 4Atul Jaysing PatilNoch keine Bewertungen
- CNCDokument63 SeitenCNCSahil Bangia100% (1)
- What is the function of commutator in DC motorDokument4 SeitenWhat is the function of commutator in DC motorSovanNoch keine Bewertungen
- Principle of Operation: Key Elements Interacting To Produce MotionDokument5 SeitenPrinciple of Operation: Key Elements Interacting To Produce MotionamitbslpawarNoch keine Bewertungen
- AC MotorDokument18 SeitenAC MotorCathy IsraelNoch keine Bewertungen
- Electric DrivesDokument16 SeitenElectric DrivesvigneshNoch keine Bewertungen
- Everything That Moves Uses Motors: An Introduction to DC Electric MotorsDokument31 SeitenEverything That Moves Uses Motors: An Introduction to DC Electric MotorsJames Adrian Abalde SaboNoch keine Bewertungen
- Electrical Drive Advantages of Electrical DriveDokument4 SeitenElectrical Drive Advantages of Electrical DriveSylesh SreehariNoch keine Bewertungen
- UNIT-3 Robot Drive MechanisamDokument82 SeitenUNIT-3 Robot Drive MechanisamChetuNoch keine Bewertungen
- Stepper Motor & Servo Motor: S.RavisubramanianDokument78 SeitenStepper Motor & Servo Motor: S.RavisubramanianRajesh Vella100% (3)
- Controlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACDokument17 SeitenControlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACandita ranniNoch keine Bewertungen
- motorDokument19 SeitenmotorRabi khanNoch keine Bewertungen
- MECHATRONICS IN ROBOTICS: ELECTRICAL DRIVESDokument34 SeitenMECHATRONICS IN ROBOTICS: ELECTRICAL DRIVESDeepa Ragav RNoch keine Bewertungen
- Unit 3Dokument64 SeitenUnit 3Yuvan Krishnan VNoch keine Bewertungen
- Module 5 ElectricalDokument22 SeitenModule 5 ElectricalSKANDAN BHARADWAJNoch keine Bewertungen
- Answer For QuestionDokument4 SeitenAnswer For QuestionMohd AmerNoch keine Bewertungen
- Motors Convert Electric Energy To Mechanical MotionDokument9 SeitenMotors Convert Electric Energy To Mechanical MotionwissamhijaziNoch keine Bewertungen
- Unit 2Dokument29 SeitenUnit 2VELIVELA LAKSHMIKANTHNoch keine Bewertungen
- Unit-2, PPT 1Dokument29 SeitenUnit-2, PPT 1VELIVELA LAKSHMIKANTHNoch keine Bewertungen
- Introduction Robot Drive SystemsDokument17 SeitenIntroduction Robot Drive SystemsTemesgen100% (2)
- Everything About BLDC MotorsDokument22 SeitenEverything About BLDC MotorsNyn SoniNoch keine Bewertungen
- Scotch Yoke MechanismDokument37 SeitenScotch Yoke MechanismSaravanan Viswakarma100% (1)
- DC, Servo & Stepper Motors ExplainedDokument2 SeitenDC, Servo & Stepper Motors ExplainedidatscribdNoch keine Bewertungen
- Unit III SPMDokument65 SeitenUnit III SPMMukesh KatoleNoch keine Bewertungen
- Unit Ii PDFDokument17 SeitenUnit Ii PDFManojKumar MNoch keine Bewertungen
- Multipurpose Machines Using Scotch Yoke MechanismDokument36 SeitenMultipurpose Machines Using Scotch Yoke Mechanismnithinkenator88% (16)
- EEE-UNIT 3 Machines and DrivesDokument54 SeitenEEE-UNIT 3 Machines and DrivesSano ManjiroNoch keine Bewertungen
- DifferenceDokument3 SeitenDifferencemoh300Noch keine Bewertungen
- Embedded Systems Actuators and MotorsDokument47 SeitenEmbedded Systems Actuators and MotorsSayeda Asma NoorNoch keine Bewertungen
- Stepper Motor GuideDokument13 SeitenStepper Motor Guidejit dharaNoch keine Bewertungen
- Electric Motor Types & WorkingDokument8 SeitenElectric Motor Types & WorkingPlutoNoch keine Bewertungen
- Robot Drive Systems and End Effectors GuideDokument84 SeitenRobot Drive Systems and End Effectors GuideSatheesh KumarNoch keine Bewertungen
- Unit-II: Robot Drive Systems and End EffectorsDokument81 SeitenUnit-II: Robot Drive Systems and End EffectorsSatheesh KumarNoch keine Bewertungen
- Shaded Pole Induction MotorDokument7 SeitenShaded Pole Induction MotorRahul BhumkarNoch keine Bewertungen
- IoT Extra Notes MotorsDokument3 SeitenIoT Extra Notes MotorsAlroy AlmeidaNoch keine Bewertungen
- DC MotorDokument3 SeitenDC MotorAhmad AzizudinNoch keine Bewertungen
- DC MotorsDokument12 SeitenDC MotorsJamie Ray DalisayNoch keine Bewertungen
- Electrical Actuation SystemDokument8 SeitenElectrical Actuation SystemShriyash KamatNoch keine Bewertungen
- Chapter - 1 DET5063 Combine pdf-1Dokument30 SeitenChapter - 1 DET5063 Combine pdf-1Muhd FaizNoch keine Bewertungen
- Reluctance MotorDokument27 SeitenReluctance MotorMax Sedric L LaylayNoch keine Bewertungen
- Special Purpose Motors and Control DevicesDokument43 SeitenSpecial Purpose Motors and Control DevicesDominick BasNoch keine Bewertungen
- 4.1 DC Motor SpecificationDokument6 Seiten4.1 DC Motor SpecificationAsgher KhattakNoch keine Bewertungen
- MotorDokument29 SeitenMotorbokor45836Noch keine Bewertungen
- Servo Motor Guide - Types, Working Principles & DifferencesDokument9 SeitenServo Motor Guide - Types, Working Principles & DifferencesDINESHKUMAR SNoch keine Bewertungen
- Week 3 B 2 Electric MotorsDokument59 SeitenWeek 3 B 2 Electric MotorsCharlton S.InaoNoch keine Bewertungen
- Electric Motors For RoboticsDokument16 SeitenElectric Motors For RoboticsMunindar KumarNoch keine Bewertungen
- AC and DC Motor Drives ExplainedDokument24 SeitenAC and DC Motor Drives ExplainedNilanjan PodderNoch keine Bewertungen
- What Is A Stepper MotorDokument12 SeitenWhat Is A Stepper MotorteddiyfentawNoch keine Bewertungen
- DC MotorsDokument12 SeitenDC Motorsmuletola7Noch keine Bewertungen
- 1 - Stepper MotorDokument3 Seiten1 - Stepper MotorHARSHIT TOMARNoch keine Bewertungen
- Unit I (SM) PDFDokument89 SeitenUnit I (SM) PDFshiva sai donthulaNoch keine Bewertungen
- Mechatronics Lab Assignment: Servo MotorsDokument3 SeitenMechatronics Lab Assignment: Servo MotorsNavendu GuptaNoch keine Bewertungen
- DC BrushlessDokument8 SeitenDC BrushlessMC ANoch keine Bewertungen
- Synchronous MotorDokument33 SeitenSynchronous Motorvnyshreyas100% (2)
- DC Motors and Stepper Motors PDFDokument8 SeitenDC Motors and Stepper Motors PDFFrank AlvarezNoch keine Bewertungen
- Unit 3 CNC Machine Tools: StructureDokument17 SeitenUnit 3 CNC Machine Tools: StructureRohit GhulanavarNoch keine Bewertungen
- Electric Drives - DC Motors (Description and Applications) : Brushed (Field Energised) Motors (Motors Using Wound Rotors)Dokument6 SeitenElectric Drives - DC Motors (Description and Applications) : Brushed (Field Energised) Motors (Motors Using Wound Rotors)Vasudev SurendranNoch keine Bewertungen
- Lean Six Sigma: Werner Jefferson Barrios Zepeda - 2012-12584 PresentsDokument5 SeitenLean Six Sigma: Werner Jefferson Barrios Zepeda - 2012-12584 PresentsJefferson BarriosNoch keine Bewertungen
- GearsDokument13 SeitenGearsJefferson BarriosNoch keine Bewertungen
- Worsheet EnglishDokument19 SeitenWorsheet EnglishJefferson BarriosNoch keine Bewertungen
- Name: Werner Jefferson Barrios Zepeda ID: 2012-12584Dokument4 SeitenName: Werner Jefferson Barrios Zepeda ID: 2012-12584Jefferson BarriosNoch keine Bewertungen
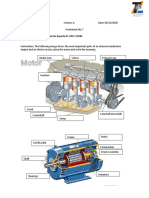
- Motor PartsDokument3 SeitenMotor PartsJefferson BarriosNoch keine Bewertungen
- Name: Werner Jefferson Barrios Zepeda ID: 2012 IT3Dokument2 SeitenName: Werner Jefferson Barrios Zepeda ID: 2012 IT3Jefferson BarriosNoch keine Bewertungen
- Power Screw ReportDokument15 SeitenPower Screw ReportTanvesh PatilNoch keine Bewertungen
- Final ReviewDokument104 SeitenFinal Reviewzhou wangchaoNoch keine Bewertungen
- Manual NovaturnDokument86 SeitenManual NovaturnVictor SerranoNoch keine Bewertungen
- COLUMN DESIGN REPORTDokument13 SeitenCOLUMN DESIGN REPORTdongshengNoch keine Bewertungen
- Costs of Individual Equipment ExplainedPacked towers:C, = 1.7C, + Nf&fC, + CDokument7 SeitenCosts of Individual Equipment ExplainedPacked towers:C, = 1.7C, + Nf&fC, + CNishithNoch keine Bewertungen
- High-Temperature High-Strength Nickel-Base Alloys: A Practical Guide To The Use of Nickel-Containing Alloys N 393Dokument86 SeitenHigh-Temperature High-Strength Nickel-Base Alloys: A Practical Guide To The Use of Nickel-Containing Alloys N 393DNH RND - VijaykumarNoch keine Bewertungen
- TD302REC: Specifications Standard EquipmentDokument2 SeitenTD302REC: Specifications Standard EquipmentfuffinoNoch keine Bewertungen
- ANSYS-CFD Analysis of Condensation Process Occurring Inside High Efficiency BoilersDokument20 SeitenANSYS-CFD Analysis of Condensation Process Occurring Inside High Efficiency Boilerskulov1592Noch keine Bewertungen
- JC GGC 2011 Catalogue Low ResDokument52 SeitenJC GGC 2011 Catalogue Low ResgaluNoch keine Bewertungen
- Renault Master BrochureDokument37 SeitenRenault Master BrochureAdriano Freire SilvaNoch keine Bewertungen
- Threads Unc, Unf, UnefDokument3 SeitenThreads Unc, Unf, UnefIlya FuksmanNoch keine Bewertungen
- PPM High-Strength Anchor Bolt Peikko Group 05-2015Dokument36 SeitenPPM High-Strength Anchor Bolt Peikko Group 05-2015Jody Inggil PambudiNoch keine Bewertungen
- Superlift MetricDokument2 SeitenSuperlift MetricAshley DeanNoch keine Bewertungen
- INSTRUMENTED PILE LOAD TEST REPORTDokument24 SeitenINSTRUMENTED PILE LOAD TEST REPORTsandrock92Noch keine Bewertungen
- Genie Scc755psDokument2 SeitenGenie Scc755psWellington Xavier Pazmiño RodríguezNoch keine Bewertungen
- Volvo Ecr50D: Parts CatalogDokument469 SeitenVolvo Ecr50D: Parts CataloggiselleNoch keine Bewertungen
- Body Builders Guide PDFDokument216 SeitenBody Builders Guide PDFvo phuongNoch keine Bewertungen
- HP Valve PDFDokument48 SeitenHP Valve PDFTuanTu NguyenTranNoch keine Bewertungen
- Rectangular DuctDokument67 SeitenRectangular DuctAUCE9802100% (3)
- IEA A43 PR2 A16 Reference Cooling Tower EES Model CASJL PhAJL080108Dokument6 SeitenIEA A43 PR2 A16 Reference Cooling Tower EES Model CASJL PhAJL080108saeedalipourNoch keine Bewertungen
- Circular Motion Week 2Dokument8 SeitenCircular Motion Week 2Solace HusseinNoch keine Bewertungen
- B-3801 IOM - Rev - 2011-09-02 (1) MidlandDokument23 SeitenB-3801 IOM - Rev - 2011-09-02 (1) MidlandLucas MonteNoch keine Bewertungen
- Directional Soil Improvement Tech for Underground ProjectsDokument38 SeitenDirectional Soil Improvement Tech for Underground ProjectsVanDuongNguyenNoch keine Bewertungen
- Mini Fragment Implants and InstrumentsDokument13 SeitenMini Fragment Implants and InstrumentsMarc KleinNoch keine Bewertungen
- Overhaul Four-Wheel Drive Transfer Case ModuleDokument37 SeitenOverhaul Four-Wheel Drive Transfer Case ModulePaul KennyNoch keine Bewertungen
- Crown ToolsDokument20 SeitenCrown ToolsLuis Alberto Rivas GarciaNoch keine Bewertungen
- Design of crane runway girdersDokument4 SeitenDesign of crane runway girdersHamdi AslanNoch keine Bewertungen
- Tractor Operator AgricultureDokument9 SeitenTractor Operator AgricultureConstantin CarpenNoch keine Bewertungen
- DIY Balancing.: © Tony Foale 2008Dokument6 SeitenDIY Balancing.: © Tony Foale 2008Factory PerformanceNoch keine Bewertungen