Das könnte Ihnen auch gefallen
- Jean-Louis Cohen - Exhibitionist Revisionism - Exposing Architectural History (September 1999)Dokument10 SeitenJean-Louis Cohen - Exhibitionist Revisionism - Exposing Architectural History (September 1999)Javier PerezNoch keine Bewertungen
- DSE4610 DSE4620 Operators ManualDokument86 SeitenDSE4610 DSE4620 Operators ManualJorge Carrasco100% (6)
- Module 2 - Data StructuresDokument48 SeitenModule 2 - Data Structuressagni0% (1)
- Subordination, Non - Disturbance and Attornment AgreementDokument7 SeitenSubordination, Non - Disturbance and Attornment AgreementDavid CromwellNoch keine Bewertungen
- FM Assignment 17-M-518 MMM - Eicher MotorDokument33 SeitenFM Assignment 17-M-518 MMM - Eicher MotorTrilokNoch keine Bewertungen
- Irregular Verbs Lesson PlanDokument13 SeitenIrregular Verbs Lesson Planapi-311868026Noch keine Bewertungen
- Unit 4 2Dokument51 SeitenUnit 4 2Dhruv NagulwarNoch keine Bewertungen
- Unit-1 Concurrent and Parallel Programming Syllabus: Concurrent Versus Sequential Programming. Concurrent Programming Constructs and RaceDokument16 SeitenUnit-1 Concurrent and Parallel Programming Syllabus: Concurrent Versus Sequential Programming. Concurrent Programming Constructs and RaceSandhya GubbalaNoch keine Bewertungen
- Part 1 - Lecture 3 - Parallel Software-1Dokument45 SeitenPart 1 - Lecture 3 - Parallel Software-1Ahmad AbbaNoch keine Bewertungen
- Unit 4 Parallel Models, Languages, and CompilersDokument127 SeitenUnit 4 Parallel Models, Languages, and CompilersPallavi BhartiNoch keine Bewertungen
- Visit:: Join Telegram To Get Instant Updates: Contact: MAIL: Instagram: Instagram: Whatsapp ShareDokument31 SeitenVisit:: Join Telegram To Get Instant Updates: Contact: MAIL: Instagram: Instagram: Whatsapp ShareVidyashree M SNoch keine Bewertungen
- Module 3 ConcurrencyDokument26 SeitenModule 3 Concurrency202202214Noch keine Bewertungen
- Reviewer PlattechDokument7 SeitenReviewer Plattechmart arvyNoch keine Bewertungen
- Mother Gnanamma Women's College of Arts and Science VaradarajanpetDokument137 SeitenMother Gnanamma Women's College of Arts and Science Varadarajanpetabirose191Noch keine Bewertungen
- Chapter-10 Parallel Programming Models, Languages and CompilersDokument30 SeitenChapter-10 Parallel Programming Models, Languages and CompilersGagana.k kNoch keine Bewertungen
- CH 1Dokument32 SeitenCH 1Mahir AbirNoch keine Bewertungen
- Module-5 ACA PDFDokument30 SeitenModule-5 ACA PDFTanay Balraj100% (1)
- PDC Assing 1Dokument3 SeitenPDC Assing 1SAMAR BUTTNoch keine Bewertungen
- Ghibli Vibe Presentation Template by EaTempDokument39 SeitenGhibli Vibe Presentation Template by EaTempJohn Rold Picardal ArcalaNoch keine Bewertungen
- Chapter 2Dokument43 SeitenChapter 2Nebiyu TakeleNoch keine Bewertungen
- ReviewerDokument11 SeitenReviewerMilraclesNoch keine Bewertungen
- CS526 3 Design of Parallel ProgramsDokument83 SeitenCS526 3 Design of Parallel ProgramsanonymousNoch keine Bewertungen
- High Performance ComputingDokument17 SeitenHigh Performance ComputingPranav BansalNoch keine Bewertungen
- Distributed SharDistributed Shared Memoryed MemoryDokument52 SeitenDistributed SharDistributed Shared Memoryed Memorythiagu1985Noch keine Bewertungen
- Softwares: Computer SystemsDokument51 SeitenSoftwares: Computer SystemsHans Marc SimplicioNoch keine Bewertungen
- PPL Unit 4Dokument21 SeitenPPL Unit 4themojlvlNoch keine Bewertungen
- Chapter-10 Parallel Programming Models, Languages and CompilersDokument30 SeitenChapter-10 Parallel Programming Models, Languages and Compilers1HK16CS104 Muntazir Hussain BhatNoch keine Bewertungen
- ACA Unit 4Dokument41 SeitenACA Unit 4sushil@irdNoch keine Bewertungen
- Lecture 1 & 2Dokument28 SeitenLecture 1 & 2SakshiNoch keine Bewertungen
- Lecture06 ConcurrencyDokument1 SeiteLecture06 ConcurrencyKhalid ShawkyNoch keine Bewertungen
- Mid 1 Slide 1Dokument21 SeitenMid 1 Slide 1Inzamamul HaqueNoch keine Bewertungen
- 02 - CSC 201 - Intro To ProgrammingDokument10 Seiten02 - CSC 201 - Intro To Programmingigbokevivian35Noch keine Bewertungen
- CF Unit 4Dokument25 SeitenCF Unit 4fayaz mohammedNoch keine Bewertungen
- SOFTARE AND SOFTWARE DEVELOPMENT (Autosaved)Dokument23 SeitenSOFTARE AND SOFTWARE DEVELOPMENT (Autosaved)olufemimleduNoch keine Bewertungen
- Software NewDokument44 SeitenSoftware NewDolapo's PlugNoch keine Bewertungen
- C++ Chap1 Quick NoteDokument14 SeitenC++ Chap1 Quick NoteNahom DiresNoch keine Bewertungen
- Lecture1 Introduction PDFDokument43 SeitenLecture1 Introduction PDFDeepesh MeenaNoch keine Bewertungen
- Concurrent and Parallel Programming .Unit-1Dokument8 SeitenConcurrent and Parallel Programming .Unit-1ashokNoch keine Bewertungen
- Distributed SystemsDokument68 SeitenDistributed SystemsUtkarshMalikNoch keine Bewertungen
- CF Unit 4Dokument23 SeitenCF Unit 4AvengersNoch keine Bewertungen
- Implementation Issues, Open-Source Development - Open-Source Licensing - GPL, LGPL, BSD.Dokument24 SeitenImplementation Issues, Open-Source Development - Open-Source Licensing - GPL, LGPL, BSD.peterparkerspnNoch keine Bewertungen
- Unit 4 - Cloud Programming ModelsDokument21 SeitenUnit 4 - Cloud Programming ModelsMag CreationNoch keine Bewertungen
- Chapter 3 ProcessesDokument42 SeitenChapter 3 ProcessesLusi ሉሲNoch keine Bewertungen
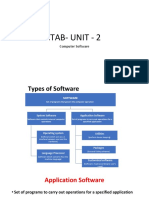
- Itab-Unit - 2: Computer SoftwareDokument87 SeitenItab-Unit - 2: Computer SoftwareVivek BaloniNoch keine Bewertungen
- Module 1 - OSDokument79 SeitenModule 1 - OSSAI PRATHEESH R JUNoch keine Bewertungen
- Emerging Technologies Unit 1 Lesson 1Dokument30 SeitenEmerging Technologies Unit 1 Lesson 1Pia Joy Dua ReyesNoch keine Bewertungen
- Distributed Systems: Tanenbaum Chapter 1Dokument70 SeitenDistributed Systems: Tanenbaum Chapter 1Kassawmar AyalewNoch keine Bewertungen
- System Software & Operating Systems OrganizationDokument34 SeitenSystem Software & Operating Systems OrganizationsuryaNoch keine Bewertungen
- Operating Systems: Introduction To Memory ManagementDokument16 SeitenOperating Systems: Introduction To Memory ManagementjamilaNoch keine Bewertungen
- ES105-Programming For Problem Solving: Chapter - 1Dokument31 SeitenES105-Programming For Problem Solving: Chapter - 1Aadil VahoraNoch keine Bewertungen
- Module 5 Cosc 203 202223Dokument28 SeitenModule 5 Cosc 203 202223oluwatomisin oyaniyiNoch keine Bewertungen
- Unit Test Question BankDokument15 SeitenUnit Test Question BankOmkar TodkarNoch keine Bewertungen
- Different Parallel Processing ArchitectureDokument41 SeitenDifferent Parallel Processing Architecturesanzog raiNoch keine Bewertungen
- Chapter 2 ProcessDokument28 SeitenChapter 2 ProcessMehari KirosNoch keine Bewertungen
- Unit 2 IntroductionDokument36 SeitenUnit 2 IntroductionKowsalyadevi PrakashNoch keine Bewertungen
- 01 - Ch1Dokument25 Seiten01 - Ch1OmarallasasmhNoch keine Bewertungen
- PPL Unit-4Dokument9 SeitenPPL Unit-4ashritNoch keine Bewertungen
- Chapter 1 NotesDokument50 SeitenChapter 1 NotesKiran janjalNoch keine Bewertungen
- Chapter 10Dokument10 SeitenChapter 10shamma alketbiNoch keine Bewertungen
- Chapter 3, ProcessDokument24 SeitenChapter 3, ProcessyonasNoch keine Bewertungen
- Advanced Computer Architectures: 17CS72 (As Per CBCS Scheme)Dokument31 SeitenAdvanced Computer Architectures: 17CS72 (As Per CBCS Scheme)Aasim InamdarNoch keine Bewertungen
- Chapter-10 Parallel Programming Models, Languages and CompilersDokument29 SeitenChapter-10 Parallel Programming Models, Languages and CompilersBharath N ReddyNoch keine Bewertungen
- Introduction To Computers and Programming and PYTHONDokument37 SeitenIntroduction To Computers and Programming and PYTHONVinayak JhinganNoch keine Bewertungen
- Pes University: Unit 1 Question Bank (Solutions To Selected Questions)Dokument7 SeitenPes University: Unit 1 Question Bank (Solutions To Selected Questions)Manogna GvNoch keine Bewertungen
- Beginning Jakarta EE: Enterprise Edition for Java: From Novice to ProfessionalVon EverandBeginning Jakarta EE: Enterprise Edition for Java: From Novice to ProfessionalNoch keine Bewertungen
- Introductory ChapterDokument56 SeitenIntroductory ChaptersagniNoch keine Bewertungen
- Programming Languages Eceg - 4182: Dr. T.R.SrinivasanDokument14 SeitenProgramming Languages Eceg - 4182: Dr. T.R.SrinivasansagniNoch keine Bewertungen
- CH 04 - PLDokument28 SeitenCH 04 - PLsagniNoch keine Bewertungen
- An Overview On Intellectual Property Rights: Presented byDokument48 SeitenAn Overview On Intellectual Property Rights: Presented bysagniNoch keine Bewertungen
- Programming Languages Eceg - 4182: Dr. T.R.SrinivasanDokument80 SeitenProgramming Languages Eceg - 4182: Dr. T.R.SrinivasansagniNoch keine Bewertungen
- Programming Languages Eceg - 4182: Dr. T.R.SrinivasanDokument13 SeitenProgramming Languages Eceg - 4182: Dr. T.R.SrinivasansagniNoch keine Bewertungen
- CH 08 - OSDokument23 SeitenCH 08 - OSsagniNoch keine Bewertungen
- Chapter 4.11 Introduction To Assembly LanguageDokument62 SeitenChapter 4.11 Introduction To Assembly LanguagesagniNoch keine Bewertungen
- Chapter 4a - High Level DesignDokument26 SeitenChapter 4a - High Level DesignsagniNoch keine Bewertungen
- Chapter 4.1 Introduction To Assembly LanguageDokument46 SeitenChapter 4.1 Introduction To Assembly LanguagesagniNoch keine Bewertungen
- Chapter 3 - Software RequirementsDokument20 SeitenChapter 3 - Software RequirementssagniNoch keine Bewertungen
- Network LayerDokument78 SeitenNetwork LayersagniNoch keine Bewertungen
- Module 3 - TreesDokument39 SeitenModule 3 - TreessagniNoch keine Bewertungen
- Routing-protocol-DC&CN 4.2Dokument45 SeitenRouting-protocol-DC&CN 4.2sagniNoch keine Bewertungen
- Unit 3Dokument61 SeitenUnit 3sagniNoch keine Bewertungen
- Chapter 3.2 Arthemetic and Logic Instruction Instruction SetDokument35 SeitenChapter 3.2 Arthemetic and Logic Instruction Instruction SetsagniNoch keine Bewertungen
- Productstock 2021-01-18 (Produk Laku & Belum KinwatchDokument32 SeitenProductstock 2021-01-18 (Produk Laku & Belum KinwatchKin WatchNoch keine Bewertungen
- Unit-4.Vector CalculusDokument32 SeitenUnit-4.Vector Calculuskhatua.deb87Noch keine Bewertungen
- Logical Database Design ModelingDokument2 SeitenLogical Database Design ModelingGio Agudo100% (1)
- Ibps RRB Po Scale - I Prelims Model Mock Test - 8Dokument7 SeitenIbps RRB Po Scale - I Prelims Model Mock Test - 8Sanjay DasNoch keine Bewertungen
- Reconductoring Using HTLS Conductors. Case Study For A 220 KV Double Circuit Transmission LINE in RomaniaDokument7 SeitenReconductoring Using HTLS Conductors. Case Study For A 220 KV Double Circuit Transmission LINE in RomaniaJose ValdiviesoNoch keine Bewertungen
- Antibiotics and Their Types, Uses, Side EffectsDokument4 SeitenAntibiotics and Their Types, Uses, Side EffectsSpislgal PhilipNoch keine Bewertungen
- EmbOS GenericDokument324 SeitenEmbOS Genericbogd33Noch keine Bewertungen
- MSDS Potassium DichromateDokument8 SeitenMSDS Potassium DichromateAyu Lakshemini OkaNoch keine Bewertungen
- Euronext Derivatives How The Market Works-V2 PDFDokument106 SeitenEuronext Derivatives How The Market Works-V2 PDFTomNoch keine Bewertungen
- National Industrial Policy 2010 (Bangla)Dokument46 SeitenNational Industrial Policy 2010 (Bangla)Md.Abdulla All Shafi0% (1)
- Sense and NonsenseDokument263 SeitenSense and NonsenseAbdulRehmanKhilji100% (1)
- Partnership For Sustainable Textiles - FactsheetDokument2 SeitenPartnership For Sustainable Textiles - FactsheetMasum SharifNoch keine Bewertungen
- Lesson 3 - Practical ResearchDokument17 SeitenLesson 3 - Practical ResearchBenNoch keine Bewertungen
- Chemical Recycling of Textile PolymersDokument8 SeitenChemical Recycling of Textile PolymersVaishali RaneNoch keine Bewertungen
- Jesoc5 1 PDFDokument15 SeitenJesoc5 1 PDFfaisal3096Noch keine Bewertungen
- Canon JX 500 - 200 - Service ManualDokument154 SeitenCanon JX 500 - 200 - Service ManualFritz BukowskyNoch keine Bewertungen
- Department of Education: Republic of The PhilippinesDokument6 SeitenDepartment of Education: Republic of The PhilippinesLalaine QuitoNoch keine Bewertungen
- Acid Bases and Salts Previous Year Questiosn Class 10 ScienceDokument5 SeitenAcid Bases and Salts Previous Year Questiosn Class 10 Scienceclashhunting123123Noch keine Bewertungen
- Cultures of The West A History, Volume 1 To 1750 3rd PDFDokument720 SeitenCultures of The West A History, Volume 1 To 1750 3rd PDFtonnyNoch keine Bewertungen
- Essay Writing TipsDokument4 SeitenEssay Writing TipsSubhasish MitraNoch keine Bewertungen
- Dede - (2010) - Comparing Frameworks For 21st Century Skills PDFDokument16 SeitenDede - (2010) - Comparing Frameworks For 21st Century Skills PDFNaing Lynn HtunNoch keine Bewertungen
- December 2022 Issue: More Transparency, P S An R T e R o M, y C en Ar P P, y PDokument24 SeitenDecember 2022 Issue: More Transparency, P S An R T e R o M, y C en Ar P P, y Pwpp8284Noch keine Bewertungen
- CV (Martin A Johnson)Dokument7 SeitenCV (Martin A Johnson)kganesanNoch keine Bewertungen
- (Application Transfer Manual Volume: Be The CadreDokument2 Seiten(Application Transfer Manual Volume: Be The CadreVishnu MuralidharanNoch keine Bewertungen
- EIC 3 Practice Exercises Unit 4Dokument3 SeitenEIC 3 Practice Exercises Unit 4Trần ChâuNoch keine Bewertungen