Das könnte Ihnen auch gefallen
- Gel Electrophoresis Lab ReportDokument10 SeitenGel Electrophoresis Lab Reportapi-31150900783% (6)
- Notes On Satellite Navigation System-1Dokument11 SeitenNotes On Satellite Navigation System-1Md Monir HossainNoch keine Bewertungen
- Chapter 01 - Introduction To Multi-User Mobile Communication SystemsDokument30 SeitenChapter 01 - Introduction To Multi-User Mobile Communication Systems王和盛Noch keine Bewertungen
- Technical Data Speedmaster SM 102: Printing Stock Blanket CylinderDokument1 SeiteTechnical Data Speedmaster SM 102: Printing Stock Blanket CylinderAHMED MALALNoch keine Bewertungen
- GX Audit Internal Audit Risk and Opportunities For 2022Dokument26 SeitenGX Audit Internal Audit Risk and Opportunities For 2022Muhammad SamiNoch keine Bewertungen
- Global Positioning: Technologies and PerformanceVon EverandGlobal Positioning: Technologies and PerformanceBewertung: 5 von 5 Sternen5/5 (1)
- Global Positioning System (GPS) : Satellite-Based Positioning SystemsDokument33 SeitenGlobal Positioning System (GPS) : Satellite-Based Positioning SystemsIli AisyahNoch keine Bewertungen
- Satellite Navigation Systems ExplainedDokument144 SeitenSatellite Navigation Systems ExplainedEreN100% (1)
- Presented By: Submitted To: Aman Mahajan Mr. I.J. Bhandola 282003Dokument29 SeitenPresented By: Submitted To: Aman Mahajan Mr. I.J. Bhandola 282003Aman MahajanNoch keine Bewertungen
- GPS Presentation PDFDokument12 SeitenGPS Presentation PDFDee CeeNoch keine Bewertungen
- Global Positioning System: Introduction ToDokument58 SeitenGlobal Positioning System: Introduction ToYasir Malik0% (1)
- Global Positioning System PDFDokument66 SeitenGlobal Positioning System PDFRupesh PandeyNoch keine Bewertungen
- Electronic Navigation: Lesson-6a: Satellite NavigationDokument159 SeitenElectronic Navigation: Lesson-6a: Satellite NavigationErcan Yüksekyıldız0% (1)
- Satellite Navigation & The Global Positioning System: Figure 1: GPS Block II-F SatelliteDokument26 SeitenSatellite Navigation & The Global Positioning System: Figure 1: GPS Block II-F SatelliteHarini Vemula100% (1)
- Maurice Nicoll The Mark PDFDokument4 SeitenMaurice Nicoll The Mark PDFErwin KroonNoch keine Bewertungen
- Principle of Functioning of DGPS & ETSDokument64 SeitenPrinciple of Functioning of DGPS & ETSseshukvs100% (1)
- Gps Lecture NotesDokument101 SeitenGps Lecture NotesRocking ChakravarthyNoch keine Bewertungen
- 3 GPS FundamentalsDokument8 Seiten3 GPS FundamentalsrajaanwarNoch keine Bewertungen
- Assignment Report: Advanced Engineering SurveyDokument12 SeitenAssignment Report: Advanced Engineering SurveySharjeel GillNoch keine Bewertungen
- Satellite NavigationDokument30 SeitenSatellite Navigationzakiannuar100% (1)
- Outline: Combining GPS & Cellular Network Measurements For PositioningDokument9 SeitenOutline: Combining GPS & Cellular Network Measurements For PositioningMuhammad Niyas N SNoch keine Bewertungen
- YavorskyDokument544 SeitenYavorskyFilipe PadilhaNoch keine Bewertungen
- LECTURE01 UpdatedDokument101 SeitenLECTURE01 Updated王和盛Noch keine Bewertungen
- Accuracy Assestment of Dgps in Control Survey Work in MinesDokument28 SeitenAccuracy Assestment of Dgps in Control Survey Work in MinessumitmatheNoch keine Bewertungen
- A Seminar Report ON: in Electronics and Communication Engineering by Ramakrishna Raju.M 08D15A0409Dokument21 SeitenA Seminar Report ON: in Electronics and Communication Engineering by Ramakrishna Raju.M 08D15A0409Ramakrishna RajuNoch keine Bewertungen
- L4 SBPSDokument18 SeitenL4 SBPSganeshNoch keine Bewertungen
- GPS - Global Positioning SystemDokument19 SeitenGPS - Global Positioning SystemS Bharadwaj ReddyNoch keine Bewertungen
- Introduction To The Global Positioning SystemDokument29 SeitenIntroduction To The Global Positioning SystemsaisatinpNoch keine Bewertungen
- GPS System ReportDokument17 SeitenGPS System ReportKanik SharmaNoch keine Bewertungen
- Part I Working of GPS/DGPS Part II Programming of GPSDokument28 SeitenPart I Working of GPS/DGPS Part II Programming of GPSSnehashish PatnaikNoch keine Bewertungen
- Using GPS for accurate GIS data captureDokument13 SeitenUsing GPS for accurate GIS data capturehiwot ytayewNoch keine Bewertungen
- Global Positioning System: Presented by K.Manoj Kumar P.SindhushaDokument18 SeitenGlobal Positioning System: Presented by K.Manoj Kumar P.SindhushabadimalamadhuNoch keine Bewertungen
- Gps Overview Apr 04Dokument24 SeitenGps Overview Apr 04Md ZaheerNoch keine Bewertungen
- GPS Seminar Report Provides Overview of Global Positioning SystemDokument13 SeitenGPS Seminar Report Provides Overview of Global Positioning SystemRAJESH KAMBOJNoch keine Bewertungen
- GPS OverviewDokument23 SeitenGPS Overviewkarna vigneshNoch keine Bewertungen
- Introduction Gps Presentation 1Dokument57 SeitenIntroduction Gps Presentation 1ganeshNoch keine Bewertungen
- Gps Overview Apr 04Dokument24 SeitenGps Overview Apr 04Pavan Chavariya100% (1)
- Global Positioning System PDFDokument16 SeitenGlobal Positioning System PDFarif iqbalNoch keine Bewertungen
- Dgps Survey For BWDBDokument34 SeitenDgps Survey For BWDBShafiqul HasanNoch keine Bewertungen
- Dr. Ahmed Said Eltrass: Global Positioning System (GPS)Dokument52 SeitenDr. Ahmed Said Eltrass: Global Positioning System (GPS)Mina MounirNoch keine Bewertungen
- GPS: How the Global Positioning System WorksDokument2 SeitenGPS: How the Global Positioning System WorksPrana AdyaNoch keine Bewertungen
- GPS Basics: How the Global Positioning System WorksDokument29 SeitenGPS Basics: How the Global Positioning System WorksSarosh SreenivasanNoch keine Bewertungen
- Mod V Adv SurvDokument35 SeitenMod V Adv SurvSouravNoch keine Bewertungen
- What Is GPSDokument6 SeitenWhat Is GPSRon_player8Noch keine Bewertungen
- Sattelite Communications (6) (1) - 150-166Dokument17 SeitenSattelite Communications (6) (1) - 150-166ks.umashankerNoch keine Bewertungen
- Navstar Sat - Radio Nav - System PDFDokument25 SeitenNavstar Sat - Radio Nav - System PDFKiril MarinovNoch keine Bewertungen
- Guochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - ChapterDokument15 SeitenGuochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - Chapternaura ANoch keine Bewertungen
- Global Positioning SystemDokument35 SeitenGlobal Positioning Systemnilmina100% (1)
- ECB 2243-06-GPS-NezaDokument39 SeitenECB 2243-06-GPS-NezalathavikneswariNoch keine Bewertungen
- Satellite Navigation (GPS)Dokument28 SeitenSatellite Navigation (GPS)NAJA MOHAMEDNoch keine Bewertungen
- Early Developments in Satellite NavigationDokument10 SeitenEarly Developments in Satellite NavigationAnkur AroraNoch keine Bewertungen
- The Global Positioning SystemDokument17 SeitenThe Global Positioning SystemMohamed AbubackerNoch keine Bewertungen
- Global Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andDokument3 SeitenGlobal Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andram reddyNoch keine Bewertungen
- A Seminar on Aircraft Navigation SystemsDokument49 SeitenA Seminar on Aircraft Navigation SystemsPriyam Khandelwal100% (1)
- TejuDokument35 SeitenTejuTejpal JhajhriaNoch keine Bewertungen
- GPS Satellite Positioning FundamentalsDokument16 SeitenGPS Satellite Positioning FundamentalsStefan AndrioaeNoch keine Bewertungen
- Gps (Global Positioning System) : Prof. A. JabeenaDokument40 SeitenGps (Global Positioning System) : Prof. A. JabeenaAryan VermaNoch keine Bewertungen
- CHAPTER-5 Introduction To GPS SurveyingDokument40 SeitenCHAPTER-5 Introduction To GPS Surveyingaduyekirkosu1scribdNoch keine Bewertungen
- Gps Data Logger Ew 11 09Dokument7 SeitenGps Data Logger Ew 11 09henrydav_oNoch keine Bewertungen
- An Overview of The Global Positioning Satellite System (GPS)Dokument44 SeitenAn Overview of The Global Positioning Satellite System (GPS)Suzanne CarrollNoch keine Bewertungen
- GPS Navigation IntroductionDokument10 SeitenGPS Navigation IntroductionfcoespinosaNoch keine Bewertungen
- GPS Guide to Global Positioning SystemsDokument40 SeitenGPS Guide to Global Positioning SystemsSafdar RizviNoch keine Bewertungen
- 8 ChapterDokument41 Seiten8 ChapterІмран АлулуNoch keine Bewertungen
- Navigation SistemsDokument16 SeitenNavigation SistemsAarón RojasNoch keine Bewertungen
- GNSS Systems ExplainedDokument25 SeitenGNSS Systems ExplainedIbrahim BodonNoch keine Bewertungen
- Global Navigation Satellite System Monitoring of the AtmosphereVon EverandGlobal Navigation Satellite System Monitoring of the AtmosphereNoch keine Bewertungen
- Problem Set 1Dokument3 SeitenProblem Set 1王和盛Noch keine Bewertungen
- Python科學計算第一次作業Dokument1 SeitePython科學計算第一次作業王和盛Noch keine Bewertungen
- Dynamic Range Control Scheme Applied To GNSS Signal Acquisition Using Evolutionary ConceptDokument27 SeitenDynamic Range Control Scheme Applied To GNSS Signal Acquisition Using Evolutionary Concept王和盛Noch keine Bewertungen
- (N) JoAAA - 397 - A "Max/min" Binary Hypothesis Test For GPS Spoofing Detection - V0Dokument9 Seiten(N) JoAAA - 397 - A "Max/min" Binary Hypothesis Test For GPS Spoofing Detection - V0王和盛Noch keine Bewertungen
- Instructor GuideDokument66 SeitenInstructor Guide王和盛Noch keine Bewertungen
- GPS Review and RAIMDokument14 SeitenGPS Review and RAIM王和盛Noch keine Bewertungen
- 100學年線性系統期中考試Dokument1 Seite100學年線性系統期中考試王和盛Noch keine Bewertungen
- 線性系統作業Dokument2 Seiten線性系統作業王和盛Noch keine Bewertungen
- Handout (Ch07) - 1 by UPADDokument1 SeiteHandout (Ch07) - 1 by UPAD王和盛Noch keine Bewertungen
- 歐陽廷廷的秘辛Dokument3 Seiten歐陽廷廷的秘辛王和盛Noch keine Bewertungen
- Lec 02Dokument18 SeitenLec 02王和盛Noch keine Bewertungen
- 12.540 Principles of The Global Positioning System: Prof. Thomas HerringDokument10 Seiten12.540 Principles of The Global Positioning System: Prof. Thomas Herring王和盛Noch keine Bewertungen
- 第一章講義Dokument34 Seiten第一章講義王和盛Noch keine Bewertungen
- Problem Set 01Dokument1 SeiteProblem Set 01王和盛Noch keine Bewertungen
- 線性代數講義Dokument10 Seiten線性代數講義王和盛Noch keine Bewertungen
- 線性代數講義Dokument10 Seiten線性代數講義王和盛Noch keine Bewertungen
- CH 03Dokument65 SeitenCH 03王和盛Noch keine Bewertungen
- 訊號與系統 Updated 4Dokument55 Seiten訊號與系統 Updated 4王和盛100% (1)
- IMF Frame Theory IMF Frame Theory FrameDokument2 SeitenIMF Frame Theory IMF Frame Theory Frame王和盛Noch keine Bewertungen
- Design of A Novel Chaotic Synchronization System: Yung-Nien Wang and He-Sheng WangDokument6 SeitenDesign of A Novel Chaotic Synchronization System: Yung-Nien Wang and He-Sheng Wang王和盛Noch keine Bewertungen
- Interior Point MethodDokument11 SeitenInterior Point Methodhighwaystar26Noch keine Bewertungen
- Us 20120293364Dokument12 SeitenUs 20120293364王和盛Noch keine Bewertungen
- (Correlation) (Higher-Order Cumulant) : (Dilution of Precision, DOP)Dokument2 Seiten(Correlation) (Higher-Order Cumulant) : (Dilution of Precision, DOP)王和盛Noch keine Bewertungen
- Alexvanhalen 1Dokument2 SeitenAlexvanhalen 1王和盛Noch keine Bewertungen
- 01.norden E. Huang-On Instantaneous FrequencyDokument40 Seiten01.norden E. Huang-On Instantaneous Frequency王和盛Noch keine Bewertungen
- C16王和盛Dokument7 SeitenC16王和盛王和盛Noch keine Bewertungen
- Chapter 03 - Chaotic Synchronization, Conditional Lyapunov Exponents and Lyapunov's Direct MethodDokument30 SeitenChapter 03 - Chaotic Synchronization, Conditional Lyapunov Exponents and Lyapunov's Direct Method王和盛Noch keine Bewertungen
- Chapter 02 - Chaotic Signals and Their Use in Secure CommunicationsDokument17 SeitenChapter 02 - Chaotic Signals and Their Use in Secure Communications王和盛Noch keine Bewertungen
- IFU Egg Yolk Tellurite EmulsionDokument4 SeitenIFU Egg Yolk Tellurite EmulsionoktaNoch keine Bewertungen
- Entrepreneurship Starting and Operating A Small Business 4th Edition Mariotti Test Bank Full Chapter PDFDokument33 SeitenEntrepreneurship Starting and Operating A Small Business 4th Edition Mariotti Test Bank Full Chapter PDFmelrosecontrastbtjv1w100% (15)
- Jurnal Aceh MedikaDokument10 SeitenJurnal Aceh MedikaJessica SiraitNoch keine Bewertungen
- Hussam Al-Furqan Ala Mann Haajj Al-Qur'anDokument34 SeitenHussam Al-Furqan Ala Mann Haajj Al-Qur'anNoori al-Qadiri0% (1)
- 1 - Introducing Your SelfDokument31 Seiten1 - Introducing Your SelfAbdurrahmanNoch keine Bewertungen
- Handouts For Semantics GradDokument8 SeitenHandouts For Semantics GradPhuong Thao DangNoch keine Bewertungen
- Performance of Filler Material in GabionsDokument4 SeitenPerformance of Filler Material in GabionsPreetham N KumarNoch keine Bewertungen
- CH06 Binding MaterialsDokument114 SeitenCH06 Binding MaterialsAbass AwalehNoch keine Bewertungen
- Installation and Operating Instructions Gen-Key: Energy DivisionDokument22 SeitenInstallation and Operating Instructions Gen-Key: Energy DivisionAnonymous RcxX0FcNoch keine Bewertungen
- Manual Lift Release System: Parts List and DiagramsDokument4 SeitenManual Lift Release System: Parts List and DiagramsPartagon PowNoch keine Bewertungen
- Nestle CompanyDokument5 SeitenNestle CompanymehakNoch keine Bewertungen
- Life and Works or Rizal - EssayDokument2 SeitenLife and Works or Rizal - EssayQuince CunananNoch keine Bewertungen
- UI Symphony Orchestra and Choirs Concert Features Mahler's ResurrectionDokument17 SeitenUI Symphony Orchestra and Choirs Concert Features Mahler's ResurrectionJilly CookeNoch keine Bewertungen
- Configuring Cisco Easy VPN and Easy VPN Server Using SDM: Ipsec VpnsDokument56 SeitenConfiguring Cisco Easy VPN and Easy VPN Server Using SDM: Ipsec VpnsrajkumarlodhNoch keine Bewertungen
- Technical Data Sheet 01DT-1L..: Type OverviewDokument4 SeitenTechnical Data Sheet 01DT-1L..: Type OverviewJNoch keine Bewertungen
- Laplace Transform solved problems explainedDokument41 SeitenLaplace Transform solved problems explainedduchesschloeNoch keine Bewertungen
- Preferred Vendors For CoilDokument4 SeitenPreferred Vendors For CoildeepakNoch keine Bewertungen
- Cronbach AlphaDokument15 SeitenCronbach AlphaRendy EdistiNoch keine Bewertungen
- Sample Management Representation Letter Type II SAS 70 AuditDokument2 SeitenSample Management Representation Letter Type II SAS 70 Auditaaldawi0% (1)
- Wet Specimen Preservation MethodsDokument24 SeitenWet Specimen Preservation Methodstamil selvanNoch keine Bewertungen
- SDH PDFDokument370 SeitenSDH PDFClaudia GafencuNoch keine Bewertungen
- Production of Carotenoids From Rhodotorula Mucilaginosa and Their Applications As Colorant Agent in Sweet CandyDokument7 SeitenProduction of Carotenoids From Rhodotorula Mucilaginosa and Their Applications As Colorant Agent in Sweet CandyEspinosa Balderas GenaroNoch keine Bewertungen
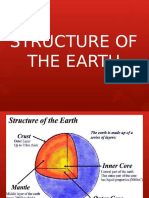
- Earth's StructureDokument10 SeitenEarth's StructureMaitum Gemark BalazonNoch keine Bewertungen
- Cable Drag ChainDokument44 SeitenCable Drag ChainsunhuynhNoch keine Bewertungen
- Deepali Bhartiya: TCI Express Limited Gurgaon Assistant Manager Prateek Group Noida Senior ExecutiveDokument3 SeitenDeepali Bhartiya: TCI Express Limited Gurgaon Assistant Manager Prateek Group Noida Senior ExecutiveThe Cultural CommitteeNoch keine Bewertungen
- Land, Soil, Water, Natural Vegetation& Wildlife ResourcesDokument26 SeitenLand, Soil, Water, Natural Vegetation& Wildlife ResourcesKritika VermaNoch keine Bewertungen